基于DSP的舵机控制系统
2015-11-30洪少华罗云高
洪少华,罗云高
(武汉交通职业学院,湖北武汉,430065)
基于DSP的舵机控制系统
洪少华,罗云高
(武汉交通职业学院,湖北武汉,430065)
远洋和内河小型船舶采用的模拟电子控制舵机技术存在传输距离长的情况下,线路易于受到外部干扰,舵机偏转角度会有不确定的稳定性缺陷。现在大型船舶虽然使用电动舵轮或者液压舵,误差范围仍很大,精确度不高。为此,设计舵机数字控制系统,即进行基于DSP的舵机控制系统设计。
DSP;舵机;控制系统
数字信号处理就是用数值计算的方式对信号进行加工的理论和技术,它的英文原名叫digital signal processing,简称DSP,即数字信号处理器。
1 方案描述
在驾驶室,当驾驶员需要改变船舶行驶方向时,可以通过方向控制器上指令单元调节舵机偏转角度。STC89C52单片机不断检测控制器上的指令单元。当驾驶员对控制器进行操作时,检测到控制器的变化,并将检测的值通过串口线发送给ARM2148辅助控制器。而在船尾,ARM2148辅助控制器也不断检测STC89C52单片机通过串口线发送给自己的值,并将检测的值同自己检测到的舵机偏转的值进行比较。如果两者相同,则继续检测;由主控制器通过电机驱动模块控制舵机进行相应角度的偏转。而当舵机偏转时,带动与之相连接的角度传感器转动,角度传感器进行编码,这些编码被核心控制器获得,并将获得的数据通过串口线发送给STC89C52单片机,由STC89C52单片机将获得的数据通过LCD1602液晶显示器显示出来。同时驾驶员也可以通过驾驶室的液晶显示屏实时掌握舵机偏转情况,以便及时进行修正。
2 方案选择
2.1 主控制器
主控制器采用的是STC89C52单片机,是一种低功耗、高性能CMOS8位微控制器,具有 8K 在系统可编程Flash 存储器。在本设计中,STC89C52单片机主要负责两项工作。一是接收控制按键给出的指令并通过串口线发送给辅助控制器LPCARM2148,使得辅助控制器PCARM2148能够及时根据指令改变舵机偏转方向。二是及时更新LCD1602液晶显示屏,将此时舵机偏转角度显示出来。
2.2 辅助控制器
在本设计中采用ARM7LPC2148作为辅助控制器。之所以选择ARM2148是因为其采用的3级流水线模式增加处理器指令流速度,这样可使几个操作同时进行,并使处理和存储之间的操作更加流畅连续,能提供0.9MIPS/MHZ的指令执行速度。因此在舵机快速偏转时,处理器仍然可以远远满足编码器瞬间给出的众多条代码值,避免使用52单片机出现的卡死现象,使整个系统更加稳定可靠。
ARM7LPC2148是基于一个支持实时仿真和嵌入式跟踪的32/16位的微控制器,并带有32kB 和512kB 嵌入的高速Flash存储器。在整个系统中主要起的作用是实时检测角度传感器偏转角度,并将检测的值同STC89C52单片机通过串口线传输过来值进行对比,如果二者值不相同,就及时修正舵机偏转方向,使之与单片机给出的指令保持一致。
2.3 角度检测部分
角度的检测电路是一种增量式的旋转译码器。这种增量旋转编码器输出精度高,性能不会因为时间缘故发生变化,舵机电动执行模块的同心连接轴连接增量旋转编码器轴。编码器轴被动旋转时,内部电路会根据旋转方向和角度大小,给出相应高低电平形式数字信号。传输给角度编码导线与之相连的角度处理传输模块。在接合数字电路特别是ARM后,增量式旋转编码器在角度测量和角速度测量较绝对式旋转编码器更具有廉价和简易的优势。通过输出波形图可知每个运动周期的时序。
2.4 驱动部分
L298N是ST公司生产的一种高电压、大电流电机驱动芯片。该芯片采用15脚封装。主要特点是:工作电压高,输出电流大,额定功率可达25W。L298N芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。而且L298N有过电流保护功能,当出现电机卡死时,可以保护电路和电机等。
2.5 显示部分
LCD1602液晶显示器是一种低功耗的显示器件,它不仅省电而且能够显示大量的信息,如文字、曲线、图形等,显示质量高,数字式接口于单片借连接更加简单可靠,操作方便。
3 系统硬件设计图
3.1 主控制器电路设计
上电复位兼手动复位电路。10μ电容和R2电阻,起着防抖动作用,C1和R1的组合使RST只送入一个高电平的脉冲。当按下按键时,RST直接与VCC相连,为高电平形成复位,同时电解电容被短路放电;按键松开时,VCC对电容充电,充电电流在电阻上,RST依然为高电平,仍然是复位,充电完成后,电容相当于开路,RST为低电平,正常工作。在本设计中,主控电路设在驾驶室,出于方便控制因素考虑,选用手动复位电路。晶振电路采用11.539M石英晶体振荡器作为主频,串口通信时才能保证快速顺畅。显示电路采用LCD1602实现。
3.2 串口电路设计
本设计的有益效果是电路采用全数字信息处理,信息传输采用串行导线采用的RS232协议可以将数据远传,能够保障系统长期可靠的工作,这一点在运输工具安全性能上尤为重要。在本设计中设计串口电路来完成主控制器STC89C52同辅助控制器ARM2148的通信。RS-232接口又称之为RS-232口、串口、异步口或一个COM(通信)口。"RS-232"是其最明确的名称。在计算机世界中,大量的接口是串口或异步口,但并不一定符合RS-232标准,但我们也通常认为它是RS-232口。关于RS-232接口引脚定义。在本设计中,只有STC89C52同辅助控制器ARM2148的通信 ,因此只需采用串口异步通信即可。
3.3 驱动电路设计
L298可驱动2个电动机,OUT1,OUT2和OUT3,OUT4之间可分别接电动机,5(IN1),7(IN2),10(IN3),12(IN4)脚接输入控制电平,控制电机的正反转,这四个引脚输入PWM脉冲,假设IN1输入一个PWM脉冲,IN2输入与IN1相反的PWM脉冲电机正转,相反的PWM可以由程序设置或者在IN2的输入前加一个反相器也可实现,建议使用程序设置方便简单,以减少硬件电路避免出现更多问题,若要实现电机的反转,则IN1、IN2输入与正转相反的脉冲即可实现,EN1、EN2接控制使能端,控制电机的停转。当使能端为低电平时,芯片不会工作。
L298使能端为高电平使能,使能端EN1、EN2可以接I/ O口控制也可直接接电源正一直使能,至于使能端是接固定电平还是接I/O口,是具体情况而定,若I/O口资源够用可接I/ O口控制,若I/O口不够用,可直接接高电平,同时,控制电机的PWM脉冲也可以从两个使能端输入,那么四个输入引脚IN1、IN2、IN3、IN4只需设置为相应的高低电平可以控制电机的正反转。
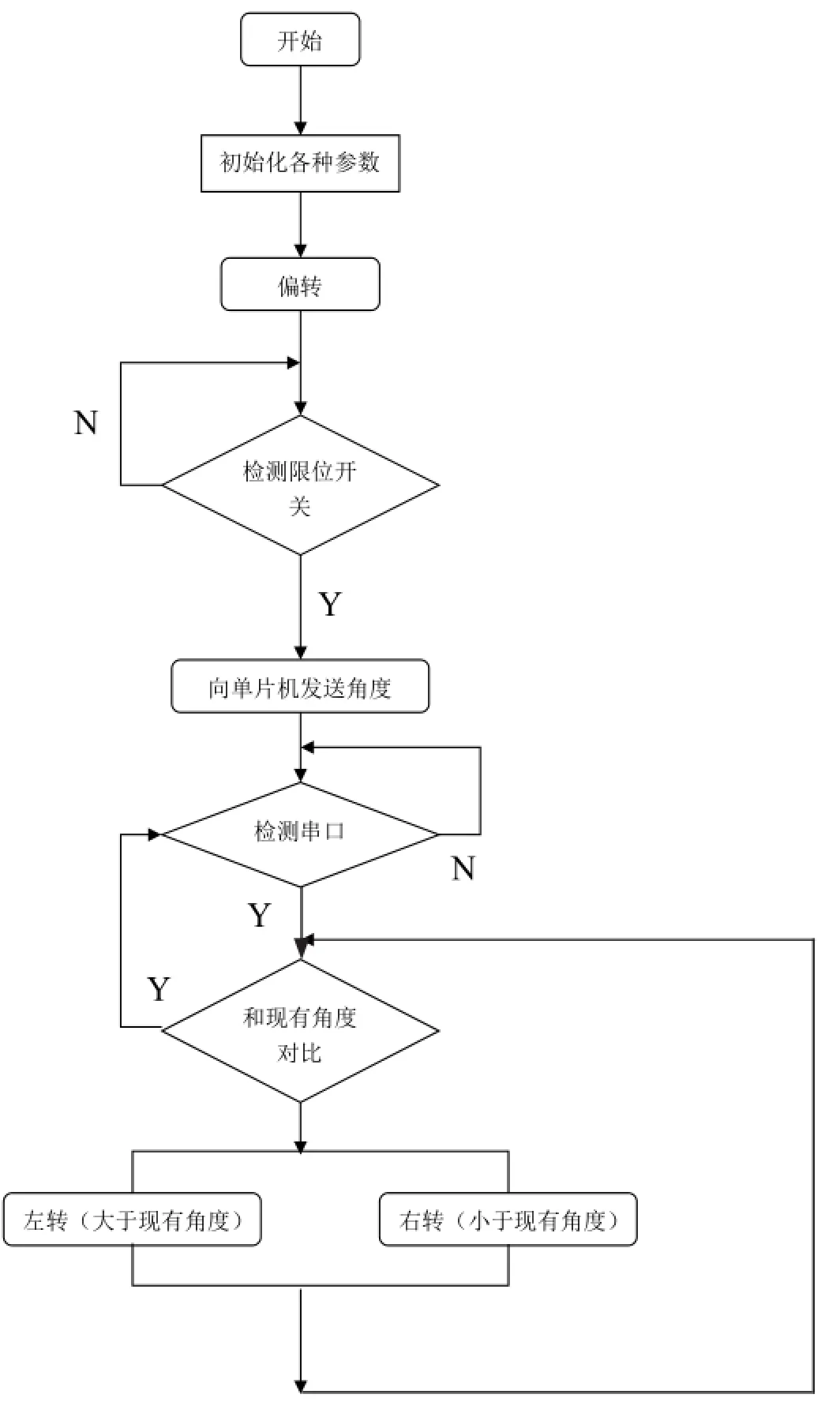
4 系统辅助控制器软件整体流程图设计
系统的软件设计是控制系统的重要组成部分,合理组织系统软件结构可提高可读性、可移植性、可扩展性以及可靠性等问题。
本系统采用C语言按模块化编写软件,主要包括通信模块、数据采集处理模块、控制算法模块以及故障检测模块。主程序是个循环体完成各种初始化、接收舵面指令以及故障检测。中断由CPU定时器0每200Ls产生一次,中断程序完成数据的采集处理,控制算法的实现。采用位置、速度、电流三闭环全数字控制,其优点是调试方便,控制策略改动容易。
5 结束语
本文研制以STC89C52单片机作为核心控制器,以ARM lpc2148作为辅助控制器, 增量旋转编码器作为角度传感器,远程控制舵机的左右偏转 ,并通过主控制器STC89C52单片机控制的LCD1602显示器实时显示舵机偏转角度。其中主控制器与辅助控制器之间通过串口线进行数据传输,从而实现对舵机的远程控制。这种数字式控制的舵机可以避免模拟电路控制所带来的精确度不高,误差较大稳定性差的问题,实现舵机控制的轻型化和小型化,节省船体空间,增加载重。实验表明,整个系统简单可靠,达到预定要求,运行效果良好。
[1]王慧玲主编.电路基础[M].高等教育出版社, 2007.
[2]杨志忠主编. 数字电子技术[M(第3版)]. 高等教育出版社, 2007.
洪少华(1957.10——),男,武汉交通职业学院机电工程学院副教授,研究方向:机电工程。罗云高(1955.11——),男,武汉交通职业学院电子信息工程学院高级实验师,研究方向:电子信息工程。

图4 信号源输出波形
从图4中可以看出,信号源输出信号波形光滑,具有较高的频率稳定度,符合设计要求。
6 结论
随着电子信息技术及通信技术的快速发展,人们在实际的生产生活中对信号发生器的要求也越来越高,不仅要求信号的频率、宽带及分辨率,也要求信号的调制特性于波形等。从信号源设计与应用现状来看,高性价比的信号源是未来开发与研究的主要趋势。因此,本文分析了一种基于FPGA的DDS信号源,对系统整体设计及各单元功能进行了详细分析。望本文研究能够对信号源设计提供新思路。
参考文献
[1]雷俊陶. 基于CycloneⅡ的FPGA的复杂调制信号源的设计与实现[D].兰州交通大学,2014.
[2]张凯琳. 基于FPGA和DDS多路信号源的设计与实现[D].中北大学,2012.
[3]梁孟享,胡聪,盘书宝. 基于FPGA的高性能信号源模块设计[J]. 国外电子测量技术,2012,04:64-67.
作者简介
徐红丽,女,1983年出生,讲师,软件工程硕士。
DSP servo control system based on
Hong Shaohua,Luo Yungao
(Wuhan Technical College of Communications,Hubei Wuhan,430065)
Analog electronics ocean and inland small ships used to control the presence of servo technology transmission distance is long, the line is susceptible to external interference, there will be uncertainty in the steering angle of deflection stability defects. While large ships now use electric or hydraulic rudder steering wheel, the error range is still great, the accuracy is not high. For this reason, the design of digital servo control system, namely, DSP servo control system based on.
DSP; steering gear; control system
TJ765
A
