基于VC 的贴片LED 编带机视觉检测系统研制
2015-11-26拜颖乾毛红梅庞旭卿
拜颖乾,毛红梅,庞旭卿
(陕西铁路工程职业技术学院,陕西 渭南 714099)
0 引言
贴片LED 全自动编带机是按一定方向将发光二极管编入载带的自动化设备,随着现代社会的不断发展,节能高效产品越来越得到人们的青睐,所以既节能又高效的电子设备得到了飞速发展,片式发光二极管就是在这种大背景下应用得越来越广泛,故加工、包装半导体芯片设备的自动化程度也是越来越高,全自动编带机是片式发光二极管生产线上的关键设备之一[1]。随着片式发光二极管越来越小,高速运转的编带机对视觉检测系统的要求也就越来越高,进而满足芯片缺陷检测的需要。芯片的缺失检测是编带机视觉检测的重要项目之一,绝大多数半导体企业的生产现场利用索尼公司提供的视觉检测系统进行缺陷检测。该检测系统可以较准确高效地检测芯片的缺陷,但是成本过高,维护不便,不能满足企业可持续发展的要求,故需开发新的视觉检测系统以满足企业长久的发展。全自动编带机可以实现的编带效率是36000 个/h[2]。本文在VC 软件开发环境下,采用数字图像处理技术对5050 型六角正面发光贴片LED进行缺失检测,检测准确高效,成本低,维护方便,在半导体生产企业得到了广泛应用。
1 开发环境
VC6.0 是微软推出的一款可视化编程工具,应用非常广泛。VC6.0 包含了供用户创建、调试、修改应用程序等各种操作。
Visual C ++提供的MFC(Microsoft 基本类库),可供用户采用完全面向对象的编程方法进行Windows 程序开发,大大缩短程序开发时间,减小程序设计人员的工作量。
Visual C++给用户提供了丰富的开发环境,通过MFC 库提供了完整的应用程序开发骨架,开发人员可以忽略编程过程中的入口点和结束点,MFC 还提供了Document-View(文档视图)的应用程序的结构,开发人员可以将数据保存在Document 类中,数据的显示信息由View 类负责管理。由于Visual C ++灵活的编程环境和强大的功能支持,故深受程序开发人员的欢迎。
2 图像处理
2.1 检测系统的设计及实现
本文设计的视觉检测系统由照明光源、CCD 摄像机、图像采集卡、计算机以及输入输出设备组成。结构简图如图1 所示。在工业检测现场,视觉检测系统不但要满足检测速度、检测精度及检测合格率等指标,更重要的是系统稳定性一定要好。具体的实现方法是首先将CCD 摄像机实时采集的发光二极管图像通过采集卡存放到计算机内存中,然后在VC 软件开发环境下对图像进行灰度化处理,得到黑白图像。由于工业检测现场不可避免的有机械振动、电子干扰等影响,所以在处理器分析处理图像之前,必须对图像进行预处理,即消除这些干扰对图像的影响,使图像尽量保持完整清晰信息,这样才能保证检测精度,然后通过检测及计算得出临界值。根据对比检测过程中的明度值与临界值判断载带是否有料。
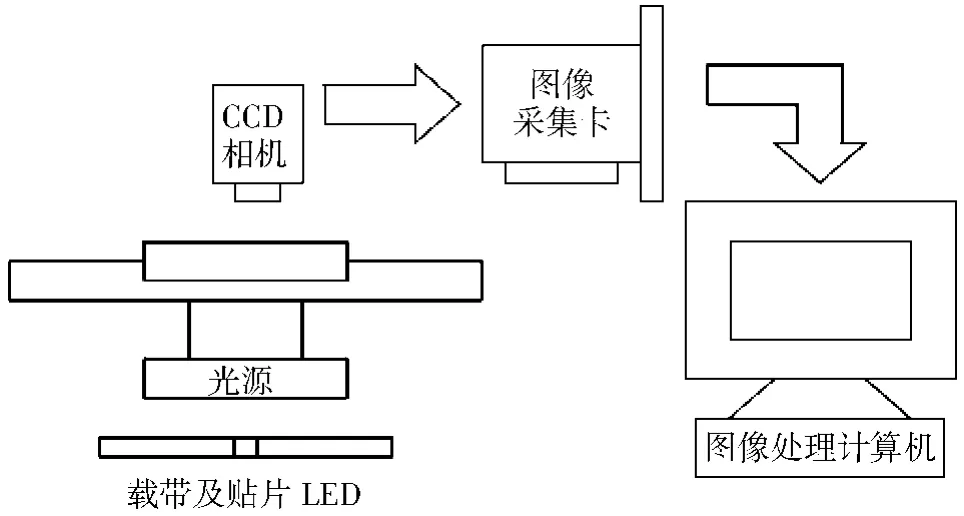
图1 检测系统结构简图
2.2 图像采集与图像预处理
图像的采集是通过调用OK-C20A 图像采集卡驱动程序中的读取函数来完成。该图像卡是基于PCI总线的彩色图像采集卡,可实时传送数字视频信号到显示存储器或系统存储器。数据的传送过程由图像卡控制,瞬时传输速度可达132 MB/s。
图像预处理是在正式对图像进行处理前采取的一系列措施,因为在生产现场不可避免地会出现各种干扰,如编带过程中的机械振动、电子设备的干扰、图像传输过程等都会对图像造成不同程度的影响,产生影响图像质量的各种噪声。在检测图像的明度值之前必须采用合适的图像增强方法消除各种噪声。一些常见的噪声有椒盐噪声、脉冲噪声、高斯噪声等。本系统在检测过程中遇到的主要是黑白相间的亮暗点噪声,即椒盐噪声。
非线性滤波算法既可消除噪声又可保持图像的细节,故采用中值滤波对贴片LED 图像进行预处理最为合适。中值滤波不但可以很好地消除椒盐噪声,而且可以很好地保存图像的边缘信息。图2 为原始图像,图3 为中值滤波后的图像。可以看出,图像经中值滤波后得到了明显的改善。
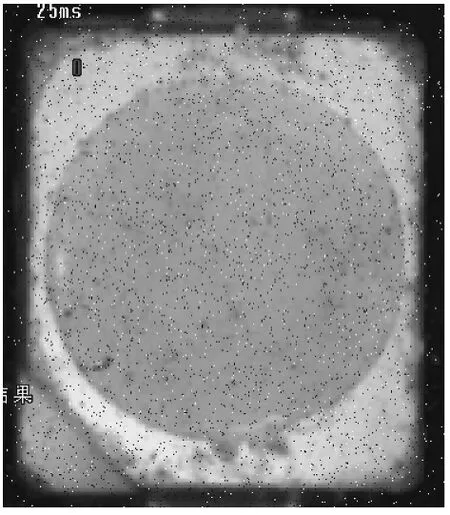
图2 原始图像
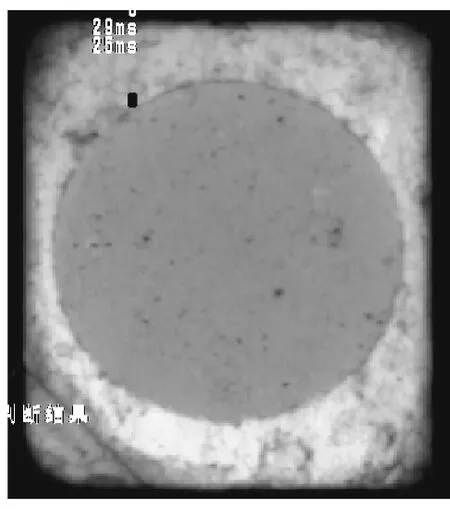
图3 中值滤波后图像
2.3 图像检测区域的划定
图4 是分别经过灰度化处理和中值滤波后的图像,并且对载带有料及无料情况下的区域进行划定。对这2 种图像的明度值进行大量检测,并计算平均明度偏差值,进而确定临界值。
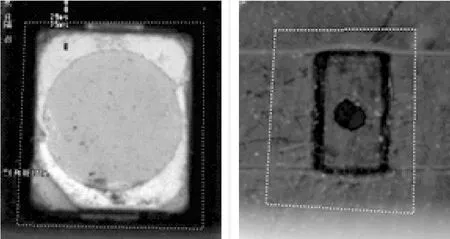
图4 载带里有料和无料时划定的检测区域
3 图像位置补正
3.1 位置补正概述
在视觉检测过程中如果被检对象相对于原位置有了位移,即便是短距离的偏移,则检测就无法得到准确的结果,故对芯片的位置进行补正是保证视觉检测准确性的重要环节。
检测过程中,如果可以检测出基准位置到当前位置的偏移量,那么不管芯片发生短距离还是长距离的偏移,都可以进行正确的检测。
在视觉检测过程中,高速运转的编带机必然会使芯片发生偏移,正确地对芯片位置进行补正是确保检测准确性的前提,芯片的偏移必然不是单一方向的,故在水平方向、垂直方向及偏转角度上都要进行位置补正。
3.2 位置补正的方案
采用二值化边缘法对图像进行位置补正。二值化边缘法将芯片图像进行二值化处理,通过扫描黑白像素点的方式确定图像的边缘,并确定边缘的x/y 坐标,以此坐标为基准位置,可以确定当前位置到基准位置的偏移量。
矩形被检物与圆形被检物检出的边缘如图5 所示。
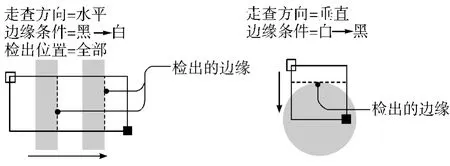
图5 水平方向与垂直方向的边缘检测
检测出芯片图像的边缘坐标x/y 后,则可以计算出芯片当前位置到基准位置的像素数目,然后利用摄像机设定像素的大小与芯片实际尺寸的大小关系,计算芯片的偏移量。
3.3 偏移量的计算
偏移量的计算是位置补正的关键所在。计算前必须首先确定芯片的基准位置,即芯片的x/y 坐标,然后根据芯片当前位置坐标与基准位置坐标计算芯片偏移量。编带机视觉检测系统要能快速准确地检测芯片的各类缺陷,正确计算芯片当前位置到基准位置的偏移量至关重要。
偏移量计算的关键环节是基准位置坐标及当前位置坐标,故可通过坐标系计算芯片水平、竖直及角度上的偏移量。坐标系如图6 所示。
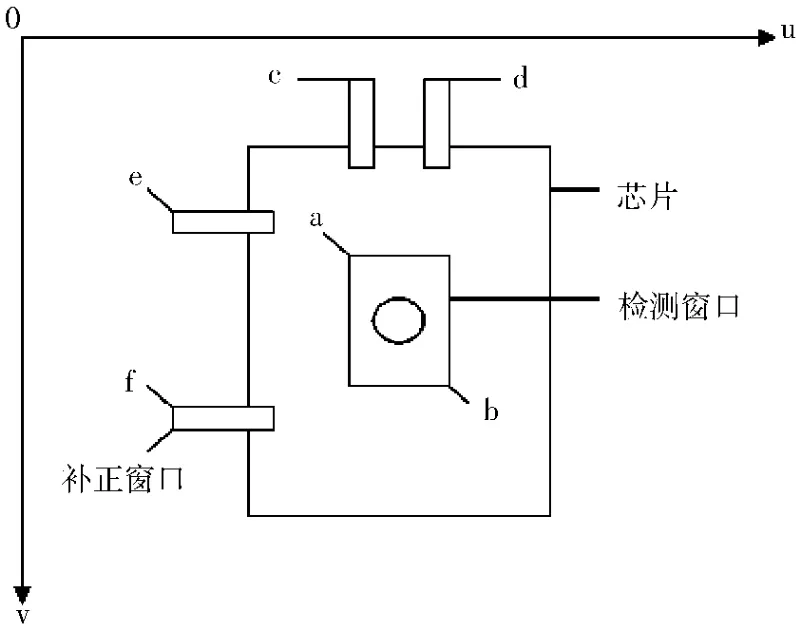
图6 偏移量计算坐标系
设a,b,c,d,e,f 5 个点的坐标及c,d 2 点到芯片上边缘的垂直距离与e,f 2 点到芯片左边缘的水平距离分别为(x0,y0),(x1,y1),(x2,y2),(x3,y3),(x4,y4),(x5,y5),h1,h2,w1,w2。
设被检物的水平偏移量、垂直偏移量及偏转角度分别为Δx,Δy,Δθ。根据检测过程中芯片实际偏移情况及左边缘补正窗口和上边缘补正窗口可以简化出如图7 所示的2 个直角三角形。
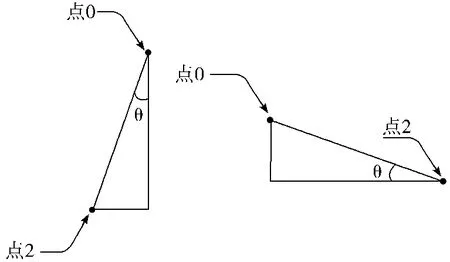
图7 直角三角形
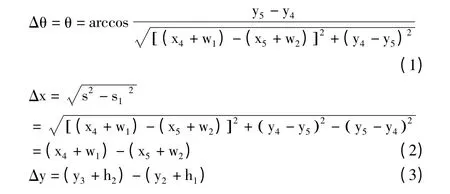
计算的结果分别为:
4 明度值检测结果
本文之所以采用明度检测的算法判断5050 型六角正面发光贴片LED 在编带过程中是否有缺失,是经过大量的反复试验得出的,故抽检10 个芯片样本在载带有料及无料情况下的明度值和明度偏差值。通过得到的10 组明度偏差值,可以确定临界值的大小。利用该算法进行缺失检测,计算量小,维护方便,准确率高,故在半导体企业视觉检测系统中得到广泛应用。检测的明度值及明度偏差值数据见表1。

表1 5050 型六角正面发光贴片LED 载带有料和无料时检测区域的明度值及偏差值
5 结束语
由表1 可以看出,载带在有料和无料2 种情况下的明度偏差平均值为60.605,故临界值选为60,即当检测区域明度值>60 时,载带有料,反之则载带无料。
[1]刘少芳,单忠频,缪来虎,等.全自动表面贴装LED 编带机的研制[J].电子机械工程,2008,24(2):19-22.
[2]窦洪海,班定平.全自动SMD 晶体元件编带机总体设计[J].机电工程技术,2009,38(3):83-85.
[3]贺振东,王耀南,毛建旭,等.基于反向P-M 扩散的钢轨表面缺陷视觉检测[J].自动化学报,2014,40(8):1667-1679.
[4]王风路.基于台达机器视觉系统的汽车零部件测量[J].可编程控制器与工厂自动化,2014(2):101-103.
[5]龚陈林.PCB 检测系统中短路和断路的检测识别[J].电脑知识与技术,2012(7):1648-1654.
[6]曹立波,刘曜,权利.基于视觉检测的汽车乘员分类识别研究[J].汽车工程,2013,35(9):799-802.
[7]刘薇.贯流风叶焊接机视觉定位系统实现[J].制造业自动化,2012(24):51-53.
[8]周志峰.光杆六角螺栓的视觉检测[J].光学技术,2012,38(4):415-420.
[9]王新强,常秀岩.计算机视觉检测技术探讨[J].数字技术与应用,2014(7):196.
[10]付骞.印花织物的疵点检测[J].西安航空学院学报,2013,31(5):50-52.
[11]李秀怡,黄继风.盲被动图像检测技术的研究[J].微计算机应用,2007,28(12):1237-1241.
[12]刘增杰.SOT 型二极管自动编带机监控系统的研究[D].天津:天津科技大学,2005.
[13]李刚,韩建国.PCB 图像检测中阈值化分割的研究[J].北京化工大学学报(自然科学版),2002,29(4):72-74.
[14]任晓庆.BD-601 型全自动IC 编带机的结构设计[J].电子工业专用设备,2000,29(3):53-56.
[15]黄爱民,安向京.数字图像处理与分析基础[M].北京:中国水利水电出版社,2005.
[16]张文景,张文渊,苏键锋,等.计算机视觉检测技术及其在机械零件检测中的应用[J].上海交通大学学报,1999,33(5):635-638.
