基于柔性力敏传感器的左右脚动态识别方法*
2015-11-18汪飞跃姚志明许胜强杨先军
汪飞跃,姚志明,许胜强,魏 凯,杨先军
(1.安徽大学电子信息工程学院,合肥 230009;2.中国科学院合肥智能机械研究所安徽省仿生感知与先进机器人技术重点实验室,合肥 230031;3.江苏省体育科学研究所,南京 210033;4.北京体育大学,北京 100084)
基于柔性力敏传感器的左右脚动态识别方法*
汪飞跃1,2,姚志明2,3,4*,许胜强2,魏 凯1,2,杨先军2
(1.安徽大学电子信息工程学院,合肥 230009;2.中国科学院合肥智能机械研究所安徽省仿生感知与先进机器人技术重点实验室,合肥 230031;3.江苏省体育科学研究所,南京 210033;4.北京体育大学,北京 100084)
在利用柔性力敏传感器获取动态足底压力分布数据时,能够准确快速自动区分左右脚的数据将极大提升数据的可视性和分析的便利性。为此,提出了一种基于足底压力和脚印外观形状的左右脚动态识别方法。首先,基于足底动力学原理,利用连通域的图像分割算法对足底压力数据进行聚类分析,得到每一步压力脚印的时间和坐标范围;在此基础上进一步分离出完整的单步压力数据;最后利用单步压力数据刻画脚印轮廓,并根据轮廓的外观特征进行左右脚识别。本文提出的方法可应用于步态分析、临床辅助诊断、步态识别等领域。通过108个实测数据样本的测试表明:本文方法的识别率高达94.5%,并具有较好的鲁棒性。
柔性力敏传感器;连通区域算法;轮廓特征;聚类分析;脚印识别
柔性力敏传感器在临床辅助诊断[1-3]、步态分析[4-7]、步态识别[8-9]等领域得到了广泛的应用。柔性力敏传感器能够实时、准确的获取人在正常行走过程中的足底压力数据,通过对足底压力数据的分析解算,可以得到每一步的着地时刻、离地时刻、脚印范围、脚印面积、着地时间、单步平均压力值、单 步最大压力值以及单步腾空时间等步态特征参数, 从而实现对测试者步态的评价。足底压力数据的 分析解算主要包括单步足底压力数据的提取和左 右脚的识别。在文献[10]中,依据行走过程中的单脚特征参数和两脚之间的过程参数,规划出脚印可能的运动轨迹曲线,实现人数统计。其不足在于在利用单脚特征参数和两脚之间的过程参数对目标脚印进行匹配时,未考虑多人较近同时行走情况下,由于脚印邻近造成错误匹配。解决此问题一个有效的方法是对已经分割出的脚印进行左右脚识别,利用前一步脚印和当前脚印的关系进行约束,如果前后两次脚印都属于同一侧脚或者是左右脚的相对位置发生改变,则此些情况应当予以排除,进而可以有效地排除由于脚印邻近造成错误匹配情况。文献[6]研制了一种新的步态触觉特征分析系统,通过结合柔性力敏传感器与测力台的优点,能够全面的提供人体步态触觉特征,但是该系统的不足在于,该系统不能自动识别左右脚,需进行人工判别,因此该系统不够方便、智能、快捷。在柔性力敏传感器的诸多应用领域中,左右脚数据的自动识别和数据分割一直是一个难题,它制约了足底压力数据的应用。如果能够解决这一问题,必将极大提升足底压力数据的可视性和分析便利性。
目前,左右脚数据分割算法比较成熟,但是较为成熟的左右脚识别方法却相对较少:在文献[4]中,首先利用Mean-shift算法对足底压力数据进行聚类,然后利用脚跟以及脚印方向来判断左右脚。这种方法能够判断正常行走的情况,但对于一些异常步态,如剪刀步态、醉酒步态等,没有很好的识别率。还有其他左右脚识别方法,比如人工判断和内置标记压力鞋垫。但这些方法各自存在弊端:人工判断的方式只适合少量脚印的判断,内置标记压力鞋垫虽然能更好的获取单步足底压力信息和压力分布,但是它不能够获取步长、步宽、步速等运动学信息。大面积柔性力敏传感器能够获取较丰富的步态信息,不仅能够获取步长、步宽、步速等空间参数信息,还可以获取单步着地时间、单步腾空时间等时间参数信息。针对以上不足,本文结合大面积柔性力敏传感器,利用连通域的图像分割算法对足底压力数据进行聚类分析,并提出了一种基于足底压力和脚印轮廓的左右脚识别方法。实验证实,本文提出的方法能够准确、快速的进行左右脚识别和数据分割,极大提升了数据可视性和分析便利性。
本文采用由中科院合肥智能机械研究所研制的基于柔性力敏传感器[11]的数字化场地(图1)获取步行时的足底压力分布数据来测试本文所提出的左右脚识别方法,该数字化场地由49块单块面积为80 cm×80 cm的柔性力敏传感器组成,单块柔性力敏传感器有80个×80个压力敏感点,数字化场地的采样频率为100 Hz。

图1 基于柔性力敏传感器的数字化场地
1 左右脚识别方法及步骤
在利用基于柔性力敏传感器的数字化场地获取足底压力分布数据时,所获得的足底压力数据是按照时间戳先后顺序依次存放在计算机缓存中,为了实现对左右脚数据的分割以及左右脚的识别,需要对缓存中的数据进行处理,主要包括数据滤波、数据聚类以及左右脚识别。数据滤波是为了滤除足底压力数据采集过程中外界噪声的干扰,数据聚类是为了获取单步脚印的起、止时间和坐标范围,再由此对单步的足底压力数据进行提取,实现单步足底压力数据的分割,进而可计算出脚印的外轮廓,最后依据轮廓的特征对脚印进行识别。
1.1 单步脚印数据分割
依据柔性力敏传感器的特点,可以将柔性力敏传感器采集到的动态足底压力数据理解成是一幅动态变换的数字图像。柔性力敏传感器传输的数据格式为:{TimeID,Row,Col,Value},分别表示时间戳,行,列和压力值。记 f(i,j)(t)表示传感器敏感点(i,j)在t时间戳时刻的采样压力值,则柔性力敏传感器在t时刻的采样信息F(t)可以用式(1)所示的矩阵形式来表示。其中,M和N分别为柔性力敏传感器的行数和列数;
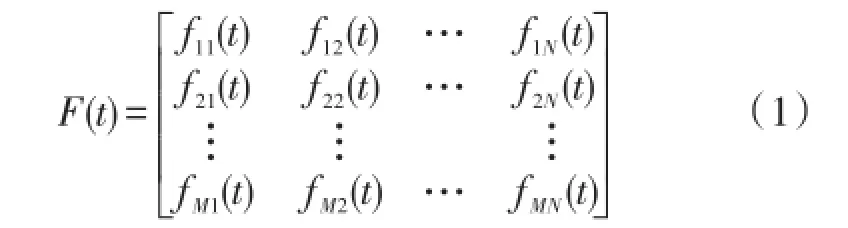
图2所示为正常行走过程中脚印的形成过程(不包括所有时序)。根据人正常行走过程中脚印形成的特点,可知人行走过程中的脚印是由不同时间戳的压力脚印叠加而成,因此,在进行单步脚印识别之前,需要对单步数据进行提取。本文基于连通域的图像分割算法[10,12-14]将不同时间戳的压力脚印进行聚类分析,从而得到目标脚印。

图2 人正常行走时脚印的形成过程
由于柔性力敏传感器生产工艺以及电流对采集电路的影响,采集数据过程中或多或少存在数据噪声干扰。为了减少噪声的干扰,需对足底压力数据进行滤波。研究发现,噪声点大都以离散点的形式出现,不会出现数据杂点聚集现象[10,13]。鉴于此,本文借鉴有关数字图像处理的方法[12,14],采用一种比较快速的剔除杂点的算法。其思想是:以当前压力点为中心,构建一个3×3的滤波窗口,统计滤波窗口内有压力值的个数,如果压力值的个数小于一定的阈值,则将此压力点剔除(本文阈值为4)。实验证明此种滤波方法能够有效快速地滤除杂点。如图3所示为去噪前的脚印图像,滤波后的效果如图4所示。
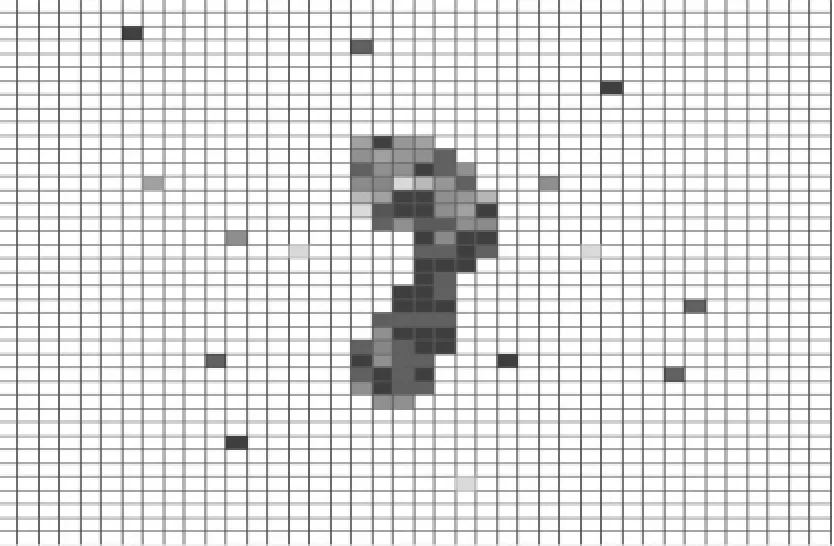
图3 去噪之前的图像
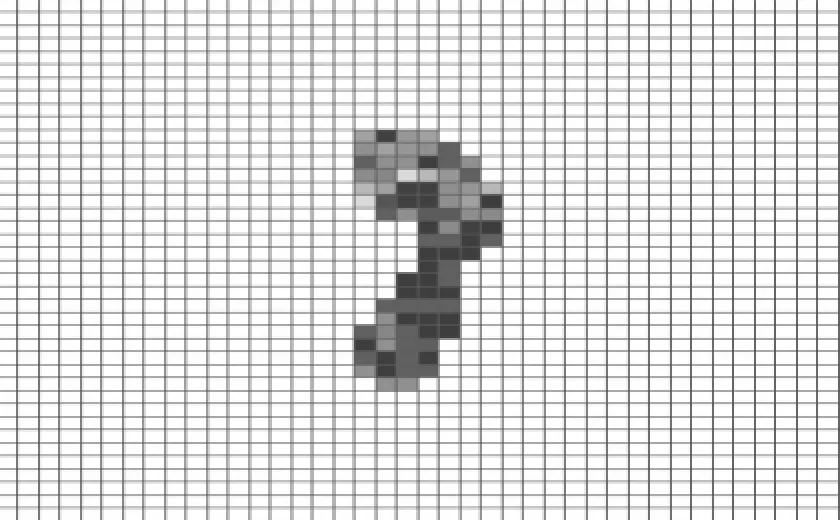
图4 去噪之后的图像
正常情况下,行走是一种有规律的运动方式,主要体现在步速的稳定、步长的稳定,步宽的稳定。因此,本文足底压力数据聚类分析基于以下几个经验条件:
条件1 正常行走过程中,步长、步宽在一个合理的范围内变化;
条件2 正常人的脚长、脚宽在比较合理的范围内;
条件3 正常行走过程中,同属一个脚印不同数据块之间的时间戳间隔在一个合理的范围内;
聚类算法主要包括以下几个步骤:
Step 1 依次扫描每一时间戳压力数据,将压力数据映射到图像矩阵中,并对图像矩阵进行二值化处理,图5(a)为例子演示;

图5 二值化矩阵8邻域连通区域标记
Step 2 利用8-邻域连通区域标记算法对二值矩阵进行标记分类,将每一时间戳的足底压力数据分为不同的区域块,计算各个区域块的坐标范围。图5(b)为8邻域连通区域标记后矩阵,其中框范围表示区域块的范围;
Step 3 根据各个区域块的几何中心和设定的相关阈值参数,将各个时间戳中不同类别的小区域类依次划分到不同的脚印中,从而实现脚印的分割。对所有的区域块进行聚类和迭代,最终可以分离出每一步脚印。
依据上述3个经验条件可知:在正常行走过程中,属与同一脚印的不同区域块之间的距离应该小于正常脚印的长度FL;不同区域块融合后形成脚印的面积应该在正常脚印面积范围FA内;不同区域块融合后形成脚印的宽度也应该在正常脚印宽度范围FW内,每一帧中不同脚印之间在空间位置上应该没有重叠;同属一个脚印的区域块之间的时间戳间隔也应在在正常的范围FT内。本文在实际操作过程中,FL阈值为27 cm,FA阈值为180 cm2,FW阈值为10 cm,FT阈值为120 ms。
本文采用最小包络框对区域块进行聚类划分,充分利用最小外接矩形的形状特征。图6(a)为聚类过程中t时刻匹配示意图。图6(b)表示不同的聚类方式。
图6(a)中C为待匹配区域块,S1、S2分别为已被正确划分的脚印,时间戳范围分别为[760,t-1]、[1520,t-1],图中MMA、MIA分别表示最小包络框的长度和宽度,(Sx1,Sy1)、(Sx2,Sy2)、(x,y)分别对应所在区域块的几何中心。图6(b)中,FL1、FL2分别为待匹配区域块到S1、S2的距离。本文以几何中心点间的距离作为区域块之间的距离,以MMA和MIA分别作为脚印的长度和宽度。
情况1:C与S1聚类,依次计算FL、FA、FW、FT,FL1=30 cm,其范围已经超出了脚印的长度FL,表明C不能够与S1合并。
情况2:C与S2聚类,依次比较FL、FA、FW、FT,计算可得,FL2=10 cm、FA=160 cm2、FW=8 cm、FT=1 ms,均符合判定阈值,再计算C与S2合并后的脚印范围,并与S1的脚印范围求交集,如果(C⋃S2)⋂S1=φ,说明脚印之间在空间位置上没有重叠,则由此可知C 与S2应属于同一脚印。C与S2应合并,S2重新计算最小包络框、几何中心、坐标范围RS以及更新时间戳范围[1520,t]。图6(c)为合并之后的效果。
如果以上两种情况都不符合,则表明待匹配区域块为一新脚印的起始帧。
聚类完成后,即可得到每一脚印的相关信息(如表1所示),包括着地时刻ST、离地时刻ET、以及坐标范围RS,其中,ST为脚印聚类开始的时间戳;ET为脚印聚类结束时刻;RS由left、top、right和bottom 4个参数组成,分别代表最小包络框的最左、最上、最右以及最下像素点所在的位置。依据所述3个信息对存储在缓存区的足底压力数据进行遍历查找,依次筛选出每一步的压力数据。
以表1中第1步为例,提取时间戳[760,1660]内,所有坐标在(0.1625,0.2625,0.4500,0.6000)范围内的压力点数据,并填充大小为60×40的脚印图像矩阵。为了后续处理方便,填充矩阵时,需增加水平和竖直偏移量,以保证脚印在图像中间。图7为提取第1步脚印的原始脚印图。

图6 聚类过程
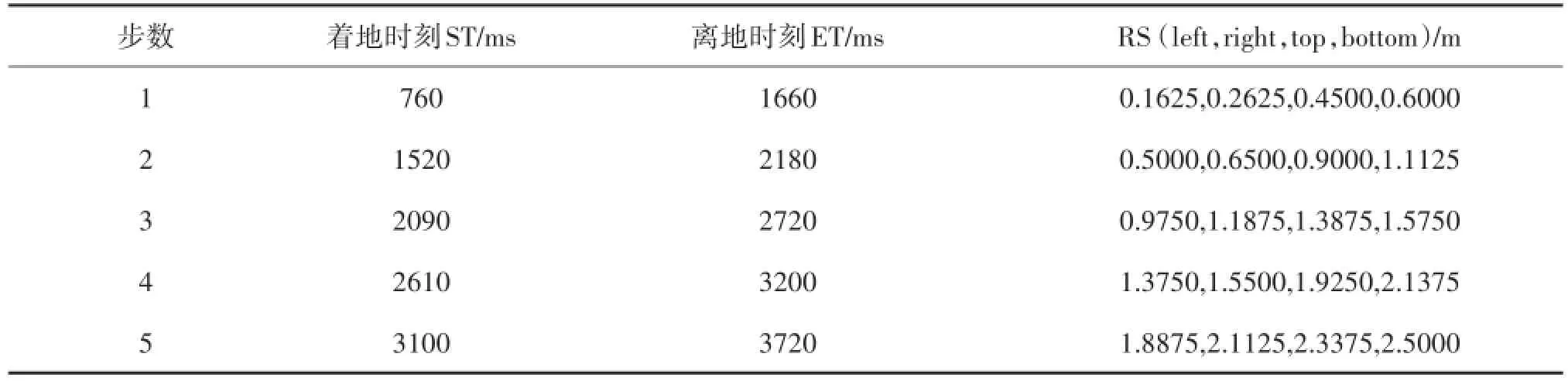
表1 足底压力数据聚类信息
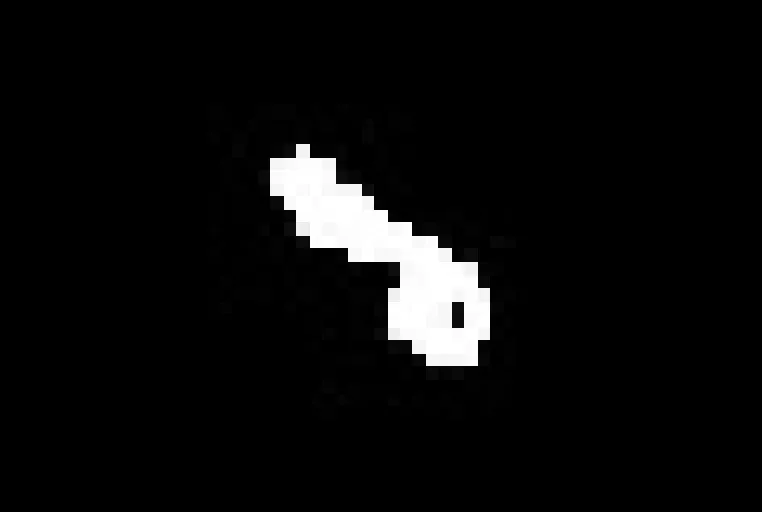
图7 第1步的原始脚印
2.2 单步脚印左右脚识别
从足部解刨学上看,脚印存在以下特征:①足内弓部分存在明显的弯曲,足外弓一侧弯曲不明显;②脚印最宽的部分在于前脚掌,其次是足后跟部分,足弓区域最为狭窄。利用柔性力敏传感器获取的单脚脚印图像也能体现出此特征,如图8所示。因此,本文在进行左右脚识别时,可以利用前脚掌和足弓的位置关系确定脚印的方向,并结合脚印的足内弓和足外弓位置关系识别左右脚。为了识别的方便,本文将脚印分为三个区域:足跟、足弓以及前脚掌。前脚掌和足内弓之间存在明显弯曲一侧,定义为内侧,前脚掌和足外弓之间弯曲不明显,定义为外侧。
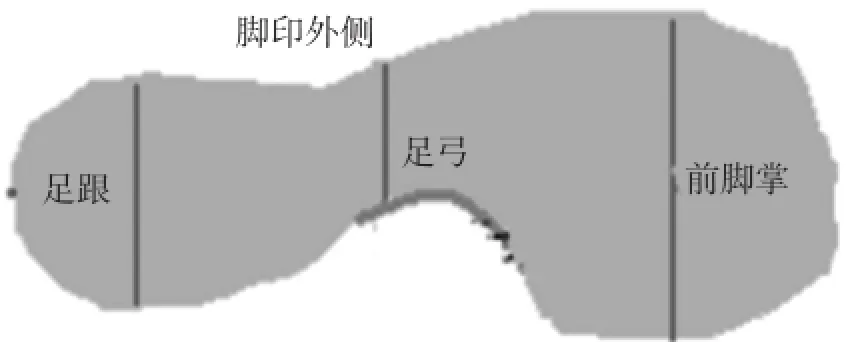
图8 单脚脚印形状
脚印识别的步骤如下:
Step 1 利用双线性内插值算法对原始图像(图7)进行放大,并对放大后的图像进行中值滤波;
Step 2 利用凸包算法[15]寻找1中图像的最小外接矩形,并计算脚印水平和垂直方向的夹角;
Step 3 利用2中所求的夹角对图像进行旋转,并进行近邻插值。图像以长轴旋转,旋转后如图9;
图9 旋转脚印图像
Step 4 对旋转后的图像进行形态学处理,主要包括膨胀和腐蚀操作,并对图像进行平滑滤波;
Step 5 利用Canny边缘检测算法对4中的图像进行外边缘提取,再次利用凸包算法计算最小外包络矩形框[10];
Step 6 以5中的外包络矩形框的长轴方向进行扫描,记录短轴方向上脚印宽度,以及上、下边界点的坐标,其中上下边界点坐标值是垂直方向上,以最小外包络矩形框的上边界为基准,脚印上、下边界点距离最小外包络矩形框的上边界的像素距离,如图10;
图10 脚印轮廓
Step 7 对脚印的宽度、以及上、下边界点的数据进行4次多项式数据拟合,为了突出拟合曲线的波峰和波谷,需要分别将横轴和纵轴范围压缩至脚印长度和脚印宽度的范围;
Step 8 利用脚印宽度曲线、上边界点曲线和下边界点曲线的极值存在情况即可判断左右脚。
数据拟合后的曲线如图11~图13所示:
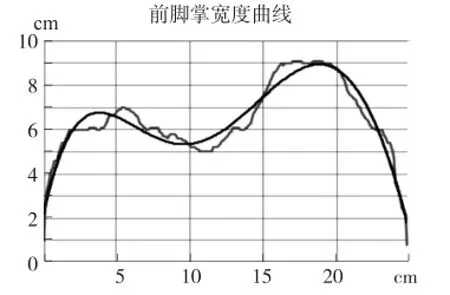
图11 脚印宽度曲线
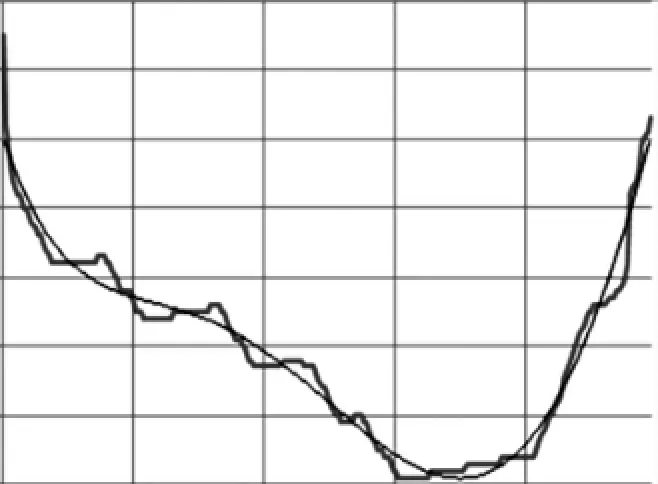
图12 上边界点曲线

图13 下边界点曲线
图11为脚印宽度曲线,横坐标表示脚的长度,纵坐标表示脚印的宽度。图中红线表示源数据脚宽曲线,黑线表示数据拟合之后的脚宽曲线。图12 和13分别代表上边界点曲线和下边界点曲线,图中横坐标表示脚印的长度,纵坐标分别代表上边界在外包络矩形框内的位置和下边界在外包络矩形框内的位置。图中红线表示源数据的位置曲线,黑线表示数据拟合后边界点位置曲线。图11~图13的横轴和纵轴的单位为cm。
记 fwidth、fup、fdown分别表示脚印的脚宽曲线、上边界点坐标曲线、下边界点坐标曲线,分别求fwidth、fup、fdown的极值分布情况。本文采用局部搜索的方法,依次比较和记录曲线的各个极值和极值个数。
假设曲线横坐标为x,纵坐标为y,x,y之间满足y=f(x),寻找极值点的策略如下:
①x从0开始,计算 f(x),以∇x为步长(∇x本文取值为0.02),计算 f(x+∇x),比较 f(x+∇x)与f(x)的大小,判断曲线的增减性,如果f(x+∇x)>f(x),表明函数在当前区域为递增,反之表明递减。
②再以 x=x+∇x为起始点,比较 f(x)与f(x+∇x),如果此次判断出的增减性与前一次一致,则重复步骤2。如果此次判断出的增减性与前一次相反,表明此段区域存在一个极值点,如果前一次为递增,此次为递减,则此点为极大值点,反之,如果前一次为递减,此次为递增,则此点为极小值点。记录极值点个数以及极值,极值以 f(x)表示(不需要准确数值,只要在极值点附近即可),再重复步骤②,直到 f(x)=0结束。
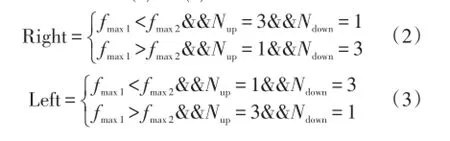
③对于脚印宽度曲线,需要比较第一个极大值fmax1与第二个极大值 fmax2的大小,如果 fmax1<fmax2,说明脚印最宽处在右侧,即脚尖向右,反之向左。对于上边界曲线和下边界点曲线,只需要统计极值点(Nup和Ndown)个数,如果极值点数目为3,则表明此边界波动明显,为脚印足内功一侧,如果极值点数目为1,则表明此边界较为平滑,为足外弓一侧。通过结合脚印的方向和极值点个数,即可识别出脚印。具体情况如式(2)、式(3)所示:
3 测试实验与结果分析
3.1 数据采集与预处理
本文中所有的数据均采集于合肥师范学院体育教育学院,实验人数为27人(20男,7女),年龄均在20周岁~23周岁,均无明显的足底疾病,行走能力正常。在进行试验之前,需给予测试者足够的时间熟悉实验环境和实验流程,并事先告诉测试者需要裸脚进行测试。待测试者了解并熟悉测试流程后,测试者按照以下4种行走方式正常行走:①测试者沿某一列正常行走;②测试者沿某一列慢速行走;③测试者沿某一列快速行走;④测试者任意方向任意速度任意姿势行走。为了保证数据有效性,每一种行走方式需重复行走4次。
此次试验中,每一种行走方式共采集108组数据样本,每组数据样本的处理流程如图14所示。
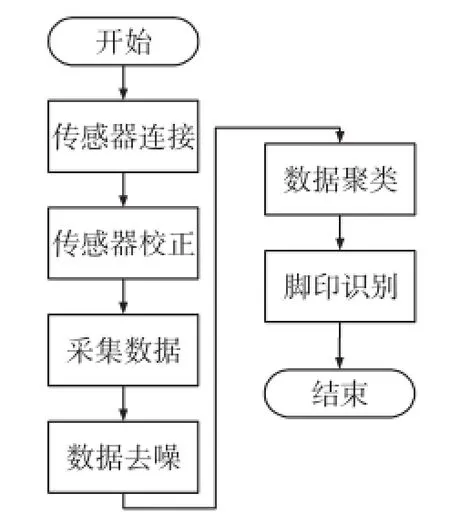
图14 数据处理流程
3.2 测试方法与评价指标
为了评价本文提出的左右脚识别方法,本文基于以下评价标准统计真实识别率。
评价标准:
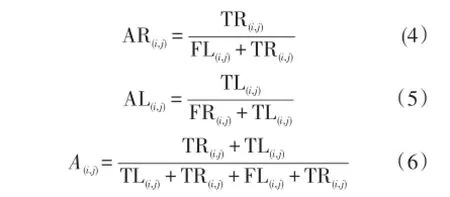
其中AR(i,j)表示第i样本以第j种行走方式行走,右脚的识别准确率;AL(i,j)表示第i样本以第j种行走方式行走,左脚的识别准确率;A(i,j)表示第i样本以第j种行走方式行走,左右脚的识别准确率。TL(i,j)表示第i样本以第j种行走方式行走实验,正确识别左脚的次数;TR(i,j)表示第i样本以第j种行走方式行走实验,正确识别右脚的次数;FL(i,j)表示第i样本以第j种行走方式行走实验,右脚识别错误的次数;FR(i,j)表示第i样本以第j种行走方式行走实验,左脚识别错误的次数。
3.3 实验结果
27位测试者按照事先的流程正常行走,计算后的左脚识别率、右脚识别率、左右脚识别率如表2所示。
实验数据表明,前面3种正常步态情况的左脚识别率、右脚识别率、左右脚平均识别率都比较高,第4种任意的行走情况的左右脚识别率比其他三种略低。经分析发现,有些测试人在进行第4种方式测试时,存在左、右脚脚跟或脚掌不着地的情况,在利用压力数据刻画压力脚印时,脚印发生大面积截断,从而造成识别错误。
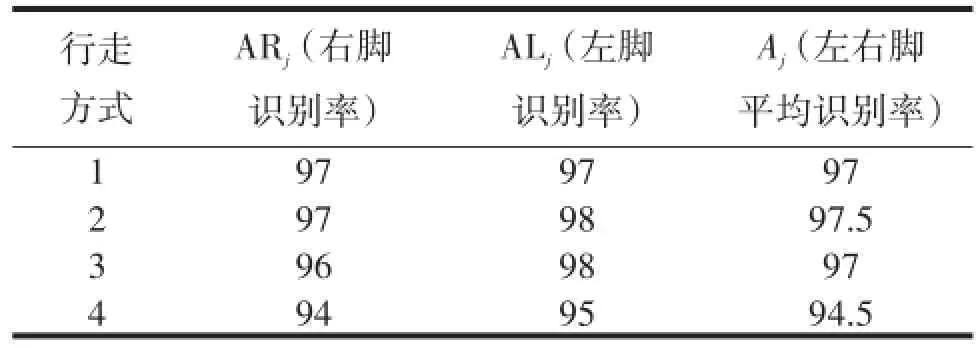
表2 脚印的识别率
本文提出的左右脚识别方法仅仅依赖于足底压力数据本身,并依据脚印的外观形状特征进行左右脚识别。同文献[4]比较发现,本文提出的左右脚识别方法具有较好的鲁棒性,针对异常步态也有很高的识别率。同人工识别相比,本文提出的方法效率很高,而且更智能。在正常步态测试环境中,本文提出左右脚识别方法能够准确、快速的进行左右脚识别和数据区分,而且具有很好的鲁棒性,拥有比较高的识别率。
通过对单步足底压力数据的分割提取和识别,可以计算得到每一脚数据的着地时刻、离地时刻、脚印范围、脚印面积、着地时间、单步平均压力值、单步最大压力值、单步腾空时间等步态特征参数。表3为应用本文方法计算得到的脚印序列的相关参数信息。

表3 脚印序列中每一步的参数信息
各个参数的含义及计算方法如下:
脚印面积:统计单脚脚印在ST、ET和RS范围内不同坐标压力点的总数,即脚印在柔性力敏传感器上留下的最大受力面积。
着地时间:又称支撑时间,表示单步获得地面支撑力的时间,即ETN-STN,N表示步数;
单步单帧最大压力值:单步在ST、ET和RS范围内,单帧最大的压力值,即

腾空时间:单步从脚趾离地到再次脚跟着地的时间,即STN+2-ETN,N表示步数;
双支撑时间:在步行过程中,有一个时期,两侧足都与地面接触,一侧足处于蹬离期,一侧足处于站立前期,双足同时都处于支撑期,此时期即为双支撑时间,即ETN-STN+1,N表示步数。
4 结束语
本文针对柔性力敏传感器在足底压力分布数据采集和应用上的数据处理需求,提出了一种快捷、高效的足底压力数据分割和左右脚动态识别方法。为分析大面积柔性力敏传感器的压力数据带来了便捷,实现了对左右脚数据的准确分离及识别,极大提升了数据可视性和分析便利性,也为步态分析与评估、神经性疾病诊断以及步态识别带来了便利。本文的聚类分析算法和左右脚识别方法依然存在需要改进的地方,如改进聚类条件,提高脚印识别效率等,这将是笔者下一步研究和改进的重点。此外,将本文的成果与步态的健康水平相结合,准确的评价步态的健康状况也是下一步研究的内容。
[1] Takeda T,Sakai Y,Hata Y.Evaluation of Autonomy Walk by Dynamic Foot Pressure Analysis[J].2013 IEEE International Conference on Systems,Man,and Cybernetics(SMC),2013,8215(2):3408-3413.
[2] Biswas A,Lemaire E,Kofman J.Dynamic Gait Stability Index Based on Plantar Pressures and Fuzzy Logic.[J].Journal of BiomeChanics,2008,41(7):1574-1581.
[3] Daliri M R.Automatic Diagnosis of Neuro-Degenerative Diseases Using Gait Dynamics[J].Measurement,2012,45(7):1729-1734.
[4] Zhang J,Qian G,Kidané A.Footprint Tracking and rRecognition Using a Pressure Sensing Floor[J].Image Processing(ICIP),2009 16th IEEE International Conference on,2009:2737-2740.
[5] 杨先军,李春丽,夏懿,等.电动跑步机上步态特征获取系统的设计[J].传感技术学报,2012,25(6):751-755.
[6] 徐苏,周旭,孙怡宁,等.一种新的步态触觉特征分析系统及应用[J].传感技术学报,2008,21(11):1935-1939.
[7] 刘洋,周旭,孙怡宁,等.基于步法的跑步机速度跟踪控制方法[J].传感技术学报,2015,28(2),217-220.
[8] 王琨,王年,鲍文霞,等.一种步态触觉特征识别算法[J].安徽大学学报,2013,37(5):32-36.
[9] Qian G,Zhang J,Kidané A.People Identification Using Floor Pressure Sensing and Analysis[J].Sensors Journal,IEEE,2010,10(9):1447-1460.
[10]许胜强,夏懿,姚志明,等.一种基于柔性力敏传感器的人数统计系统[J].计算机工程,2014,40(1):167-171.
[11]杨先军.柔性力敏传感器及其应用技术研究[D].合肥:中国科学技术大学,2012.
[12]刘海波,沈晶,郭耸.Visual C++数字图像处理技术详解[M].北京:机械工业出版社,2010:245-265.
[13]刘世法,周旭,孙怡宁,等.一种新型均值滤波器及在压力分布中的应用[J].计算机应用,2009,29(6):1728-1730
[14]Conzalez R C,Woods R E.Digital Image Processing[M].3版.北京:电子工业出版社,2010:650-664.
[15]刘光惠,陈传波.求解简单多边形和平面点集凸包的新算法[J].计算机科学,2007,34(12):222-226.

汪飞跃(1991-)男,硕士研究生,主要研究方向为信号与信息处理,youngwfy@sina.com;

杨先军(1980-),男,博士,中国科学院合肥智能机械研究所副研究员,主要研究方向为智能信号处理、传感技术、检测技术及数字体育,xjyang@iim.ac.cn。
姚志明(1983-),男,博士,中国科学院合肥智能机械研究所副研究员,主要研究方向为运动生物力学、模式识别与智能系统等,zhmyao@iim.ac.cn;
Dynamic Footprint Recognition Method Based on Flexible Force-Sensitive Sensor*
WANG Feiyue1,2,YAO Zhiming2,3,4*,XU Shengqiang2,WEI Kai1,2,YANG Xianjun2
(1.School of Electronics and Information Engineering,Anhui University,Hefe 230039,China;2.Key Laboratory of Biomimetic Sensing and Advanced Robot Technology,Institute of Intelligent Machines,Chinese Academy of Sciences,Hefei 230031,China;3.Jiangsu Research Institute of Sports Science,Nanjing 210033,China;4.Beijing Sport University,Beijing 100084,China)
Distinguishing the left and right footprint data accurately,rapidly and automatically by using the flexible force-sensitive sensor for acquiring the dynamic plantar pressure distribution data can greatly improve the visibility of data and the convenience of data analysis.Therefore,a novel method for footprints recognition based on the plantar pressure and the appearance shape features of the footprint is presented.The concrete implementation steps are as follows.Firstly,on account of the principle of the plantar kinetics,the connected component algorithm is applied to data clustering analysis,the coordinate and time range of the target footprint are obtained at the same time.Then we gain the complete plantar pressure data of each footprint and extract the appearance shape features of them.Finally,footprint recognition is accomplished on the basis of the plantar pressure and the appearance shape features. The proposed method can be applied to many fields,such as gait analysis,clinical diagnosis and gait recognition. Experimental results of 108 samples in normal walking pattern show that the proposed method not only has a high recognition rate(94.5%),but also has strong robustness.
flexible force-sensitive sensor;connected component algorithm;shape features;data clustering analysis;footprint recognition EEACC:7220
TP18
A
1004-1699(2015)07-0964-08
10.3969/j.issn.1004-1699.2015.07.004
项目来源:安徽省科技攻关计划课题项目(1301042215,1501021042);国家科技支撑计划项目(2013BAH14F01)
2014-12-04 修改日期:2015-04-02
