DSP处理器发展及应用
2015-10-24夏近洋王妍萍刘亚侠
夏近洋 王妍萍 刘亚侠
摘要:首先以时间为主线介绍DSP芯片的不同发展阶段,向读者呈现一幅清晰的DSP芯片发展脉络图;然后阐述当代DSP芯片的结构、特点,并展示DSP在实时信息处理和实时控制中的应用;最后立足当下DSP芯片应用的新特点,讨论未来DSP芯片的发展趋势。
关键词:DSP芯片;发展阶段;特点;发展趋势
中图分类号:TP311 文献标识码:A 文章编号:1009-3044(2015)05-0260-03
Development and Application of DSP Processor
XIA Jin-yang, WANG Yan-ping* ,LIU Ya-xia
(Beijing Institute of Fashion Technology, Beijing 100029)
Abstract:The main stages of Digital Signal Processor (DSP) development are introduced. The structure, characteristics and functions of different stages of DSP chip show a clear development of new features to the reader. Then based on the current DSP chip applications, the future development trend of DSP chip are discussed.
Key words:DSP chip;development stage;characteristics;development trend
上世纪兴起的计算机技术不仅仅是科学计算工具,时代进步催化下,计算机更成为了信息处理的中心,面对复杂庞大的数字信息处理,DSP处理器应运而生。DSP技术时值当下,以其灵活、高速度、低成本的特点,在诸多领域中应用广泛,其热门程度可见一斑。
目前,DSP芯片主要应用于实时信息处理和实时控制系统。信息处理是以数字信号处理技术发展为基础,对采集并数字化的图像、声音、视频等进行变换、滤波等实时处理,以得到目标信号。实时控制主要应用在高精度伺服电机控制、制导与导航、无人机、机器人控制等对实时性要求较高的控制中,DSP芯片满足了实时信息处理和实时控制对高速度、高可靠性和高灵活性的要求,带动了DSP处理器的发展。
1 DSP处理器的发展历程
DSP含义:digital Signal Processing(数字信号处理:就是用数值计算的方式对信号进行加工的理论和技术)和Digital Signal Processor(数字信号处理器:是进行数字信号处理运算的微处理器,其主要应用是实时快速地实现各种数字信号处理算法)。
第一阶段:上世纪60年代,随着计算机技术兴起,信息处理问题越来越多。数字信号处理技术作为DSP的基础,已经在通信领域得到广泛成熟的应用,为数字信号处理技术在信息处理领域的应用奠定基础。
1965年Cooley和Tukey发表了标志性文章:《机器计算傅里叶级数的一种算法》,使得FFT算法计算量大大降低。伴随计算机结构取得颠覆性发展,开始由传统的冯诺依曼结构向哈佛结构改进,多总线结构和流水线技术的应用,促成了DSP执行指令速度快,实时处理特点。
第二阶段:上世纪70年代,随着数字信号处理技术的进一步发展, DSP理论和算法初见端倪。数字信号处理的实现是用硬件、软件或软硬结合的方法实现各种算法,由于受电子物理器件的滞后性影响,DSP处理器被束之高阁,而研制出来的DSP处理系统也是由分立元件组成的,仅限于军事、航空航天系统,并未呈现出商业化、规模化特点。
1978年,AMI公司推出了S2811,这是世界上第一个单片第一代DSP芯片,标志着准DSP芯片诞生。1979年,Intel公司发布商用可编程器件2920。S2811和2920芯片内部都没有集成现代DSP芯片的单周期乘法器,但这是DSP芯片的一个重要里程碑。
第三阶段:1980年,日本NEC公司推出第一个具有硬件乘法器的商用DSP芯片MPD7720,从而被认为是第一块真正意义上的单片第二代DSP器件,由于硬件乘法器技术的应用,使DSP的高速计算成为可能,更对以后的DSP结构影响深远。
第四阶段:上世纪80年代后期,第三代DSP芯片问世,运算速度提高,被广泛应用到通信、计算机领域。上世纪90年代,是DSP发展的黄金时代,而后第四代和第五代DSP器件相继出现。
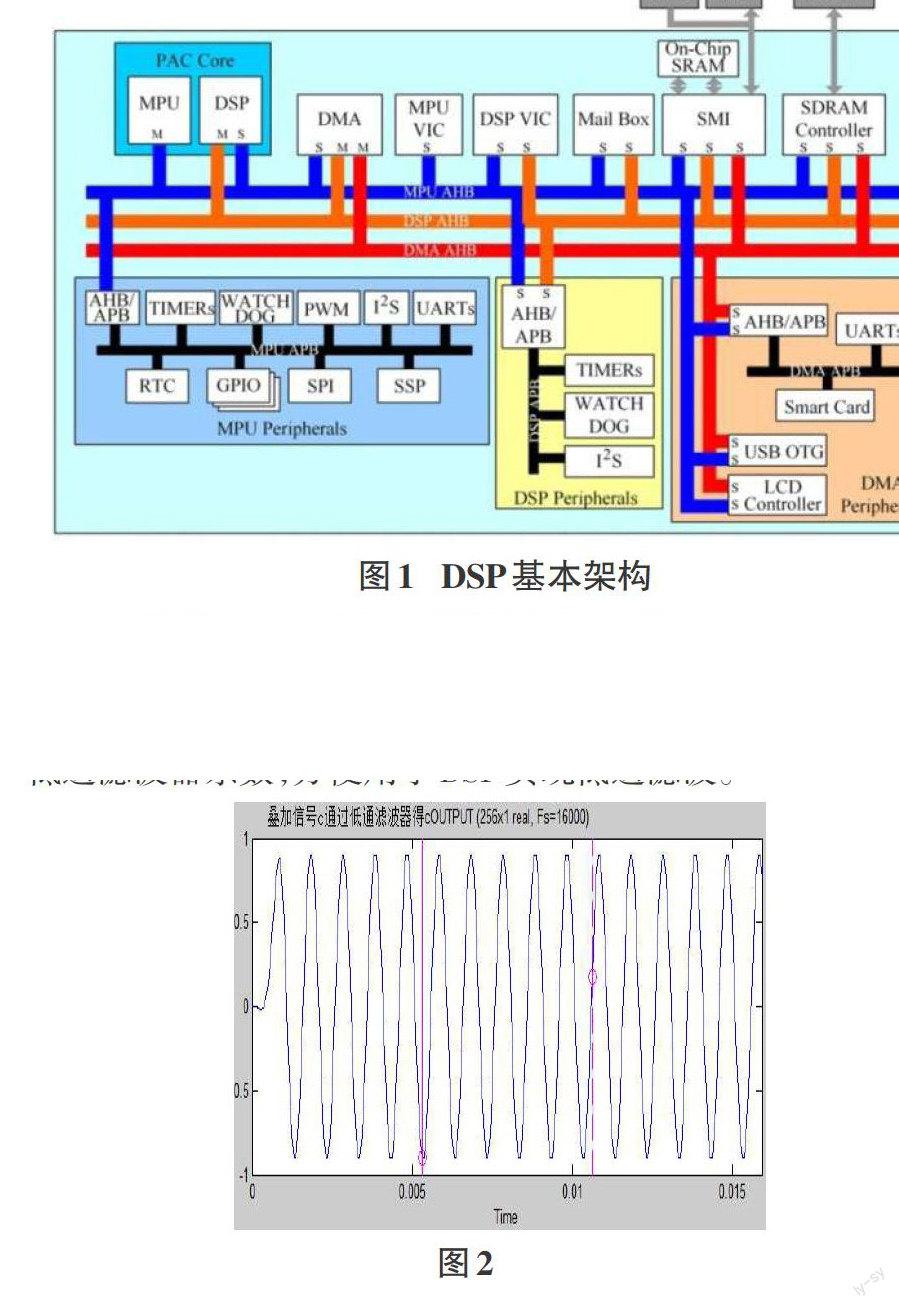
当代DSP属于第五代产品,与第四代相比,应用超大规模集成电路技术,系统集成度更高,将DSP芯核及外围元件集成到一块芯片中,在实际应用,为了进一步提高DSP工作性能和处理能力,多核技术成为DSP芯片发展新方向。极高的集成度使DSP芯片,在通信、制导导航和计算机领域的图像处理、实时控制中发挥的作用越来越大,其基本架构如图1所示。
图1 DSP基本架构
2 DSP芯片在实时信息处理中的应用
DSP芯片以高速信息处理能力著称,并因此在实时信息处理领域得到广泛应用。数字信号处理即对数字量的数学运算,其中包括滤波、变换、检测、谱分析、估计、压缩、识别、检测、调制、解调等内容,其中滤波器设计应用广泛。
2.1基于MATLAB的Filter设计,并求出低通滤波器系数
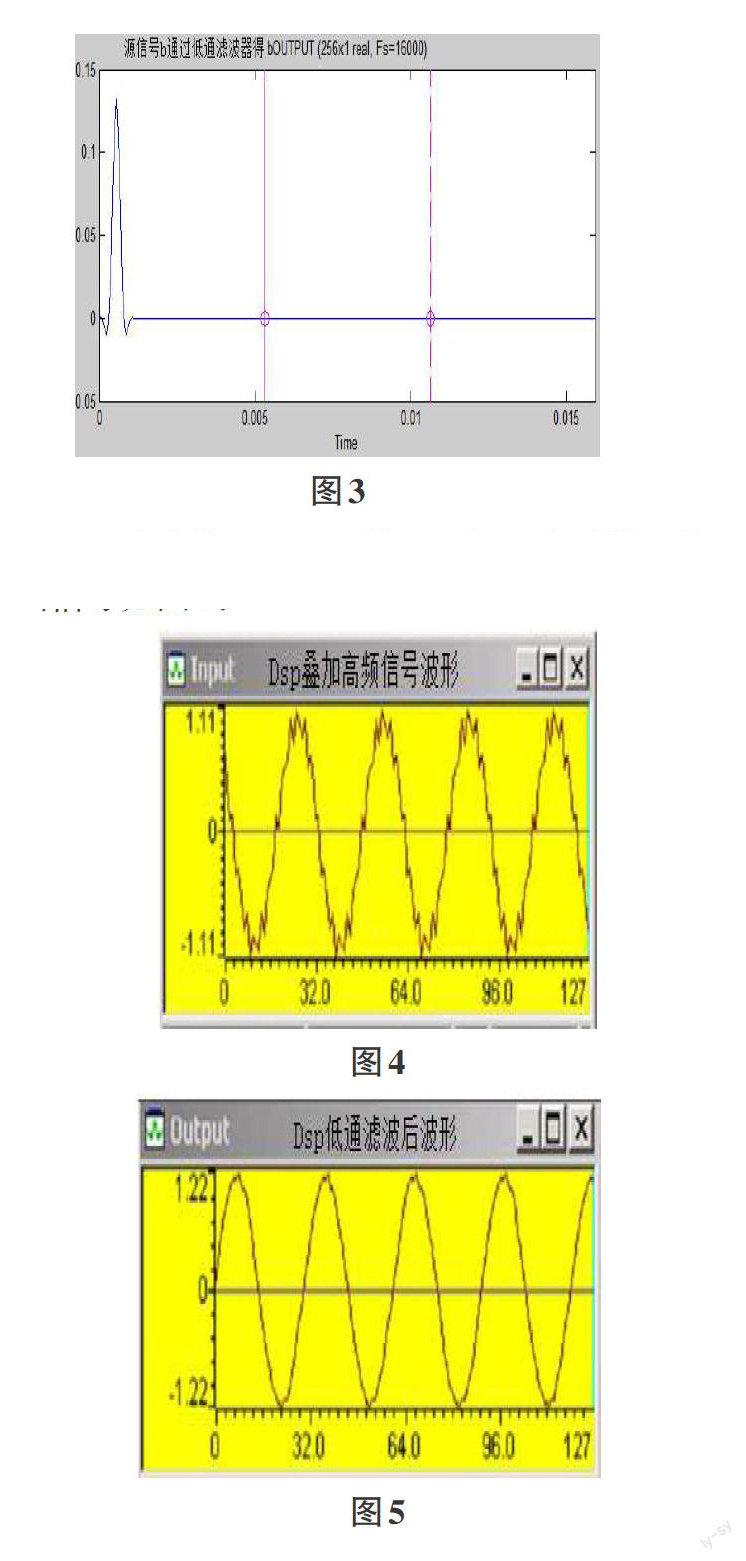
用Matlab产生频率为1kHz的正弦信号a和频率为6kHz的余弦信号b,以及两者的叠加信号c,三信号的抽样频率为16kHz,a,b,c信号提取到sptool中分析,设计低通滤波器对上述数字信号进行滤波。
(一)在MATLAB中产生a,b,c三个源信号,(单位:kHz,其中u∈(0,255)):
a=sin(2*pi*u*1/16);b=cos(2*pi*u*6/16); c=sin(2*pi*u*1/16)+cos(2*pi*u*6/16);
(二)根据低通滤波器要求,利用fdatool工具设计低通滤波器,fs=16kHz,fpass=0kHz;fstop=6kHz;Apass=1db;Astop=75db;
(三)b,c信号分别通过低通滤波器,并由MATLAB仿真,c信号通过低通滤波器后得cOUTPUT(即源信号a)如图2;高频分量(源信号b通过LOWPASS低通滤波器得bOUTPUT)被滤掉,低频分量(源信号a)被保留,如图3。并由MATLAB可得到低通滤波器系数,方便用于DSP实现低通滤波。
2.2基于realtime试验箱TMS320的FIR低通滤波器设计
使用CCS5000编程实现低通滤波器操作,采用C语言编写子程序如下:
float InputWave()
{ float fSignal1=0.0,f2PI=2PI;for (i=18;i>0;i--) fXn[i]=fXn[i-1];
fXn[0]=sin((double)fSignal1*i*1000/16000)+cos((double)fSignal1*i*6000/16000);
fSignal1+=f2PI;}
float FIR(){ float fSum=0;for ( i=0;i<19;i++ ){ fSum+=(fXn[i]*fHn[i]);}
return(fSum);}
基于TMS320的FIR低通滤波器实验效果图,输入信号如图4,输出信号如图5:
3 DSP芯片在实时控制中的应用
DSP芯片在当代电机控制中应用广泛,应用领域包括:伺服电机控制、步进电机控制、直线电机控制等,其实时性能优异,在电机调速中应用普遍。电机调速方式很多,包括:电磁调速、电阻调速、齿轮调速以及变频调速等,而随着PWM(PWM:Pulse Width Modulation)变频调速技术的应用,DSP在PWM调速控制中功不可没。
3.1 PWM调速原理
电动机转速公式:n=(U-IR)/K
现代电枢电压控制调速法常采用PWM调制技术进行调速,即控制通断电的时间:U0=a×Us,U0:电机平均驱动电压;t1/T:占空比;Us:脉冲电压,根据驱动电压公式可知:在Us不改变的情形下,t1/T占空比改变会导致电机驱动电压U0值改变,故通过控制占空比,从而达到电机调速的目的。占空比调节时,t1(高电平时间)、t2(低电平时间)和T都可以改变,但控制脉冲频率与系统固有频率相接近时,会引起震荡,因此在电动机控制中,常使用定频调宽法,即T不变,调节t1和t2的大小。
调速控制原理:
(1)当电动机正常运转时,给出低电平信号(为了保证DSP芯片的正常运转,我们通常采用灌电流方式,采用负逻辑),低电平信号通过栅极,控制MOSFET导通,此时电动机正常运转;
(2)当需要调速时,用软件设置DSP芯片端低电平时间,即:占空比a=t2/T;
(3)根据电枢的平均电压U0公式:U0=a×Us,改变低电平的时间,实现调速。
3.2基于realtime试验箱TMS320的直流电机PWM调速设计
调速子程序如下:
ioport unsigned int *tim0;ioport unsigned int *prd0;ioport unsigned int *tcr0;
ioport unsigned int *prsc0;
void InitInterrupt(void)
{ IVPD=0x80;IVPH=0x80;IER0=0x10;DBIER0=0x10;IFR0=0xffff;asm("BCLR INTM");}
void interrupt Timer()
{ nCount++;nCount%=100;if(nCount>uN)
PCR2|=4;Else PCR2&=0x0fffb;nCount1++;nCount1%=5120;}
void InitMcBSP()
{ SPCR1_2&=0x0fffe;PCR2|=0x1400;SPCR2_1&=0x0fffe;PCR1|=0x2200;}
void TIME_init(void)
{ tim0=(unsigned int *)0x1000;prd0=(unsigned int *)0x1001;
tcr0=(unsigned int *)0x1002;prsc0 =(unsigned int *)0x1003;*tcr0 =0x04f0;
*tim0=0;*prd0=0x0100;*prsc0=2;*tcr0=0x00e0;}
4 DSP芯片的发展趋势——DSP处理器与微处理器融合
科技源于生活,生活推动发展。手机已融入我们的生活,随着移动互联技术的发展和普及,手机已超出移动通信的简单功能,玩手游、定外卖、网购、收发文件,成为连接世界的窗口,新技术不断让信息时代重新定义。一切的进步,无不得意于数字处理芯片和微处理器的快速发展。要实现人机交互的现代电子设备,就需要具备信息处理能力,移动数据端作为大数据处理端,对信息处理速度要求不断提高,移动数据端智能化和微型化要求不断对新处理器提出挑战。DSP处理器是信息处理中枢,是移动数据端声音、音频、视频、图像的处理工厂,对复杂的大数据做出及时的处理,并及时与微处理器进行通信。微处理器作为智能控制的核心,对系统资源、数据流、I/O模块、总线等进行实时管理,合理分配各项系统资源,实时的管理DSP处理器。
DSP处理单元作为微处理器的一部分,分享内存区域,作为微处理器的一部分,并行于CPU,接受CPU控制,通过内总线与CPU通信,缩短通信时间,精简系统硬件结构,增加系统集成度,不断趋向于批处理、高集成、快速度,使之更加适合移动通信终端的使用,在未来通信互联终端中必将具有广泛应用前景,为人们带来更加便捷的通信、娱乐、学习、生活体验。
5 总结
DSP技术从第一片芯片产生到如今专业DSP芯片的应用,始终以高速度和高可靠性为发展准则,这使其在数字信息处理和实时控制领域随处可见。在不断地发展变化中,为满足实时性、高速度的要求,结构不断完善,功能不断强大,随着微处理器技术和人工智能技术的发展,DSP技术在未来实时控制、机器人技术、人工智能等领域的发展将与日俱新,空间广阔。而为了进一步微型化、快速化,其结构会不断与微处理器相融合,并最终会集成于一片芯片中,并提供强大的数字处理能力。
参考文献:
[1] 胡圣尧.DSP原理与应用[M].南京:东南大学出版社,2008.
[2] DSP架构——百度图片.http://image.baidu.com/.
[3] 程佩青.数字信号处理教程 [M]. 3版.北京:清华大学出版社,2007.
