腹腔微创手术机器人远程控制平台开发及实验
2015-10-24王树新刘玉亮李进华李建民杨瑞林
王树新,刘玉亮,李进华,李建民,杨瑞林
(1. 天津大学机械工程学院,天津 300072;2. 天津大学机构理论和装备设计教育部重点实验室,天津 300072)
腹腔微创手术机器人远程控制平台开发及实验
王树新1,2,刘玉亮1,2,李进华1,2,李建民1,2,杨瑞林1,2
(1. 天津大学机械工程学院,天津300072;2. 天津大学机构理论和装备设计教育部重点实验室,天津300072)
机器人辅助远程手术是将微创手术机器人技术应用于远程诊疗,有助于解决我国医疗资源分布不均的现状.基于腹腔微创手术机器人技术及远程控制需求,搭建了远程控制平台.利用最新H.264视频编解码技术及高效视频压缩/解压缩设备解决图像传输延时问题,并采用TCP/IP传输协议与上位机校验机制相结合的方法,保证远程控制数据的准确性与可靠性.结合现有MicroHand微创手术机器人与已开发远程控制平台在北京和天津之间建成机器人辅助远程微创手术示范环境.在远程手术机器人系统集成基础上开展两地之间多个时段网络环境测试及远程套环实验.经测试,两地之间控制信号单向平均网络延时最大为12.3,ms,系统双向总延时最大为302.6,ms,数据包丢失比率最大为4.10%.套环实验表明,所开发远程控制平台具有较好的主从控制性能以及远程可操作性,可进一步开展远程手术系统开发.
微创手术机器人;远程控制;TCP/IP;网络延时;套环实验
微创手术机器人是微创手术技术与机器人技术相融合的产物.机器人辅助微创手术具有如下优势:①运动平稳,定位准确,能够消除医生手部颤抖对手术操作的影响;②灵活性高,从而降低了手术难度;③具有三维立体视觉;④具有远程操作潜能.世界各国的研究机构相继开展了微创手术机器人的研究,并已开发出大量机器人样机[1-3].
自21世纪以来,越来越多的科研机构开展了远程手术机器人系统相关研究,并取得了一定的研究成果. 2001年,美国Computer Motion公司在ZeusTM系统基础上,将主从系统分离并引入网络通信以及安全机制,成功开发了ZeusTS远程手术机器人系统[4-5].这套系统后来被应用于全世界第一次跨大西洋远程临床手术——林白手术[6].2003年,日本东京大学开发了面向远程腹腔微创手术的机器人系统[7],并借助这套系统完成了日本与韩国以及日本与泰国之间的远程猪胆囊切除手术[8-9].国内一些科研机构也开展了远程机器人系统研究.2003年,中国海军总医院利用“黎元”手术机器人系统[10]完成了中国首次脑外科异地手术[11].另外,南开大学机器人与信息自动化研究所多年来致力于网络机器人理论研究,并先后开发设计了TTRP和Tele-LightSaber对弈实验系统[12-13].然而,国内关于远程腹腔微创手术机器人系统的研究则仅停留在技术研究[14]及仿真阶段[15],并没有实施样机开发工作.
开发远程手术机器人系统将会产生深远的现实意义.首先,由于地域和经济发展的限制,不同地区的外科手术质量是不一样的,远程手术既可以节省就医时间与费用,也可以使落后地区人民享受到发达地区甚至发达国家的医疗技术.其次,医生借助远程手术机器人也能够为战场上的伤员和灾区的病人提供手术救治[5].
笔者依托实验室自主研发MicroHand微创手术机器人系统,进行了腹腔微创手术机器人远程控制平台开发.MicroHand机器人采用主从式控制结构,包含主操作端和从操作端两大部分,同时具有体积小、立体视觉以及分层控制等优点[3],这使得MicroHand机器人系统易于实现远程控制开发.本文在保持MicroHand机器人系统整体不变的基础上,首先,设计改良了小型化主操作手,并根据主、从操作手构型特点确立了位置采用笛卡尔空间映射而姿态采用关节空间映射的混合映射策略;其次,为实现控制信号稳定可靠的网络传输,基于客户机/服务器模式和上、下位机控制思想,开发了远程控制系统以及上位机通信协议;然后,采用最新H.264视频编解码技术和TVI 4000,S(transmitter/receiver)图像压缩/解压缩设备解决图像传输延时问题,完成了图像反馈系统结构设计;最后,选择北京第二炮兵总医院和天津大学(相距大约150,km)作为远程示范环境,进行了一系列网络环境测试并分析了测试结果;在网络环境满足远程可操作性要求的基础上,本文开展了远程套环实验,进一步验证了所开发控制平台远程操作可行性.
1 系统概述
与一般主从式微创手术机器人系统相比,远程系统被物理空间隔离为远端子系统(主端)和本地子系统(从端),两系统采用一定的通信媒介实现信息交换. 远程手术机器人系统的本质依然是本地伺服控制系统接收主操作手控制信号,并按照一定的映射策略驱动从机器人关节运动.
1.1主操作手选型与改良
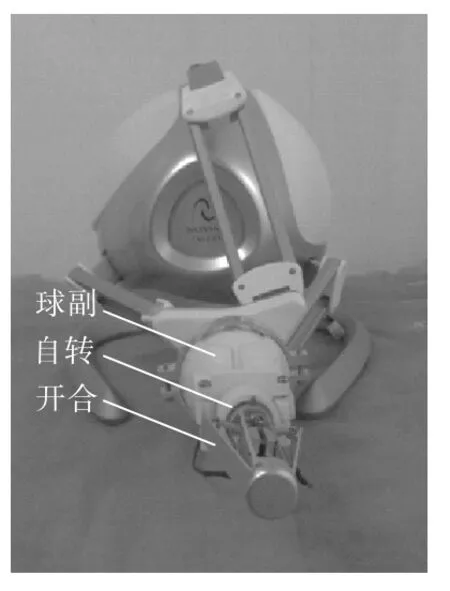
图1 改良后主操作手Fig.1 Modified master manipulator
Falcon是Novint技术公司开发的一款用于电子游戏的3,D操作手柄,它具有立体定位功能以及触觉反馈功能.其工作空间是10,cm×10,cm×10,cm,位置分辨率大于400,dpi,满足主操作手对操作空间和控制精度的要求.该操作手要求电脑具有1.0,GHz处理器、Windows系统、250,MB硬盘、512,MB内存以及USB接口,这使得它不仅应用方便,而且可移植性好.另外,由于Falcon本身只具有3个位置自由度,并不具有姿态自由度,为完成样机开发以及系统性能测试,本文通过设计姿态关节以及特定接口并引入电位器为Falcon增加了2个姿态自由度,即自转和开合,分别对应手术器械的自转自由度和开合自由度,如图1所示.这样的自由度配置跟传统微创手术器械相同,能够完成简单的操作(比如套环等),满足前期对样机遥操作一致性、控制平稳性、速度、精度及延迟等性能测试需求.设计接口采用球副可满足术前调整主操作手姿态的需求,使得主从操作手初始姿态在显示器坐标系下完全一致.
1.2从操作手系统及映射策略
从操作手系统采用实验室所研制MicroHand微创手术机器人系统的一部分.其中,从机器人具有3条机械臂,中间臂用来夹持内窥镜,其余2条机械臂用来夹持手术器械.器械臂共包含7个自由度,分别是3个位置自由度、3个姿态自由度和开合自由度.根据主从操作手自由度配置特点,本文确定主从位置控制采用笛卡尔空间映射策略,而主从姿态控制采用关节空间映射策略.主从位置和姿态均采用增量式控制模式.本地伺服控制系统负责机械臂关节电机的驱动与控制,其中控制方法采用的是改进PID控制.
1.3远程系统架构
远程手术机器人系统除了包括主操作手、从操作手以及伺服控制系统以外,还应包括远程控制系统、图像反馈系统以及用于人机交互的输入输出设备.其中,远程控制系统主要实现主从两端控制信息传输;图像反馈系统用于满足操作者对本地系统监视以及内窥镜视觉反馈;输入输出设备包括显示器、脚踏开关、麦克风以及耳机等.基于上述分析,本文以北京第二炮兵总医院和天津大学作为远程微创手术示范环境,设计了腹腔微创手术机器人远程系统的整体架构,如图2所示.

图2 腹腔微创手术机器人远程系统架构Fig.2 Tele-operated system architecture of laparoscopic minimally invasive surgery robot
2 远程控制系统
远程控制系统需要在本地伺服控制系统的基础上开发完成.与主从直接相连的控制方式不同,远程控制系统必须采用一定的通信方式和通信协议以保证操作者在主控制台不仅能够远程控制从操作手,而且能够远程控制与手术相关的医疗设备.为此,本文基于客户机/服务器(client/server)网络通信模式以及上、下位机控制思想,设计了远程控制系统,并采用面向对象的技术开发了系统控制软件.远程控制系统结构原理如图3所示.

图3 远程控制系统结构原理Fig.3Structure principle of remote control system
2.1服务器和客户机
为实现网络通信,远端子系统和本地子系统各引入1台主控制器,分别作为服务器和客户机.主控制器采用高主频、大内存电脑,负责完成计算、通信以及管理整个控制流程.服务器和客户机根据各自功能需求,扩展了不同的硬件设备,并通过设备应用程序接口(API)实现控制器对设备的访问.客户机与本地伺服控制系统工作于上、下位机模式,并且采用本地局域网进行通信.
基于C++语言,采用面向对象技术,本文开发了系统控制软件,包括服务器和客户机两部分.系统控制软件是对本地伺服控制系统软件的扩展.服务器软件实现对模拟信号量、IO信号以及主操作手末端位置坐标的采集.其中采样频率并非越快越好,而需兼顾主从控制的连贯性以及网络带宽和本地伺服控制系统的承受能力.采样频率也必须留有一定余量,保证在出现数据帧丢失以及数据帧错误而丢弃的情况下,从操作手依然可以连贯地运动.除数据采集以外,服务器还具有数据处理、IO信息编码以及数据发送与接收等功能.服务器和客户机利用套接字实现网络连接,并通过TCP/IP网络传输协议进行数据的交换.客户机软件负责数据接收与处理、IO信息译码、下位机发送,本地伺服控制系统完成对从操作手各个关节电机的伺服控制.为保证数据帧不因堆积而丢失,本地下位机发送频率要比远端采样频率稍快.客户机还可以将从操作手末端的位置和姿态信息发送回服务器,这样操作者就可以实时获取从操作手的运动状态,增加了整个控制过程的安全性.
图形用户界面是系统控制软件的一部分,是操作者与程序交互的接口,使得操作者能够方便快捷地设置参数、输入指令以及查看状态等.在本文所开发远程控制系统中,远端操作者通过图形用户界面设置服务器端口号和伺服周期,并能够实时查看主、从操作手末端位姿信息、脚踏开关状态以及网络连接状态.本地助手通过图形用户界面建立与服务器和下位机的连接,实时查看上、下位机通信状态,并能够在从操作手出现异常的情况下紧急断开客户机与服务器以及下位机之间的连接.
2.2通信协议
与UDP相比,TCP是面向连接的,具有高可靠性,适合传输大量数据,因此两主控制器之间通信采用TCP网络传输协议.虽然TCP传输速率低,但其高可靠性可降低主控制器在校验算法以及错误校正机制上所消耗的时间,因而不会影响数据通信实时性.
为实现通信双方网络数据传输安全性和可靠性,本文自定义了上位机通信协议.就本文所开发远程控制系统而言,网络传输的数据包括由远端主控制器发送到本地主控制器的主操作手末端位姿信号、脚踏开关信号以及由本地主控制器反馈回远端主控制器的从操作手末端位姿信号.其中,脚踏开关信号是以二进制编码的形式发送,对方在接收到数据之后需要进行译码才能获得相应信息,例如,当电切脚踏闭合之后,相应编码信息被发送到从端,本地主控制器经译码获得该信息后通知伺服控制系统,而伺服控制系统控制相应开关电路闭合从而实现电钩通电.这种信号处理方式使得数据帧信息容量增大而且便于信息传输.主操作手末端位姿信号用来操纵从操作手,既可以是增量模式也可以是绝对模式.若采用增量模式,上位机程序需要增加重发机制,从而保证在出现数据帧错误或者数据帧丢失的情况下,手术机器人各关节运动不会“丢步”,这会增加主控制器运算量,降低数据通信实时性.因此,本文选择以绝对模式传输主操作手末端位姿信号,在出现数据帧错误或者数据帧丢失的情况下,采用直接放弃的处理方式,在发送频率足够保证一定正确接收率的情况下不会影响主从控制的连贯性也不会导致“丢步”.从操作手末端位姿信号代表手术器械末端在内窥镜坐标系下的绝对位姿信息,用来满足操作者查看从操作手运行状态的需要,因此也必须以绝对模式传输.
为了判读数据帧的正确性,上位机软件在接收到数据帧之后需对其进行校验.本文采取的校验机制对数据帧3部分内容进行校验,分别是帧头帧尾、帧长以及CRC校验码.其中,帧头帧尾以及帧长校验可保证数据帧的独立性和完整性,而CRC校验则能实现对数据帧信息码的差错冗余校验,从而保证数据帧信息的正确性.
通过以上分析,本文确定了包含52字节的数据帧格式,如表1所示.其中,指令编码包含了数据帧的控制意图,比如器械臂控制或者持镜臂控制.该数据帧格式同时适用于控制信号和反馈信号.

表1 数据帧格式Tab.1 Data frame format
3 图像反馈系统
相对于远程控制系统,图像反馈系统是完全独立的.在本地手术机器人系统中,图像反馈仅靠短距离物理连接就能实现,且图像不需要经过编解码过程;而在远程手术机器人系统中,为满足图像在互联网传输需求,同时降低传输数据量,图像反馈系统必须引入视频编解码设备.图像反馈的内容包括内窥镜图像、手术室全景图像以及语音信号.与控制信号相比,视频和音频信号包含较大的数据量,因此视频和音频网络传输会给系统带来较大延时.为降低图像反馈延时,在保证图像不失真的前提下,所选视频编解码设备必须具有高压缩率且压缩和解压时间短.
3.1基于H.264视频编解码技术
H.264/AVC是ITU-T和ISO/IEC联合制定的最新的、具有更高性能的视频编码标准.H.264在算法上分为视频编码层(video coding layer,VCL)和网络提取层(network abstraction layer,NAL).视频编码层负责视频内容高效处理,网络提取层负责以网络格式封装数据.与先前的编码标准相比,H.264标准继承了H.263和MPEG1/2/4视频协议的优点,同时引入了一些先进的技术,包括帧内帧间预测编码、去块效应滤波、整数DCT变换和熵编码,其编解码原理如图4所示.H.264具有更高的编码效率和更强的网络适应性.
TVI 4000S视频编解码器是基于H.264标准的基本框架开发完成,在视频网络传输方面具有图像分辨率高、编解码延时小(约30~50,ms)、占用带宽低等优点,使交互式视频应用成为可能.TVI 4000S支持多种视频格式输入,同时具有单向语音传输以及双向串口数据传输功能.另外,该视频编解码器具有内嵌式服务器及物理地址,支持P2P(点对点)互联网连接.通过分析验证,TVI4000S视频编解码器不论在功能性还是在实时性方面均满足远程手术机器人系统对内窥镜图像互联网传输需求,因此本文选用该视频编解码器实现远程控制平台中视频压缩和解压缩功能.

图4 H.264编解码原理Fig.4 H.264 coding and decoding principle
3.2系统结构
图像反馈系统包括内窥镜成像系统、手术室全景成像系统、TVI 4000S视频编解码器、显示器以及麦克风和耳机.微创手术机器人远程控制平台对主从操作实时性要求较高[5],为减小内窥镜图像网络传输延时,本文采用高速校园网和IP专线分别作为主从两端的网络形式,完成图像快速传输.同时,本文采用2套TVI 4000S视频编解码器分别传输内窥镜图像和手术室全景图像,使两路图像并行传输,进一步减小图像反馈延时.为满足操作者对腹腔深度感需求,增加手术操作安全性,内窥镜图像需是立体图像,而手术室全景图像可采用平面图像.另外,在远程控制过程中,操作者需要通过语音指导本地助手完成辅助动作,因此本文借助TVI 4000S设备的单向语音传输功能,通过引入麦克风和耳机,实现了操作者语音指令的远程传输.为不影响内窥镜图像传输实时性,本文将远端操作者语音信号和本地手术室全景图像共用同一套TVI 4,000,S设备传输.整个图像反馈系统结构原理如图5所示.其中,显示器1可以为本地助手提供腹腔图像,从而使助手能够通过图像并借助微创手术器械为远端操作者提供辅助操作.
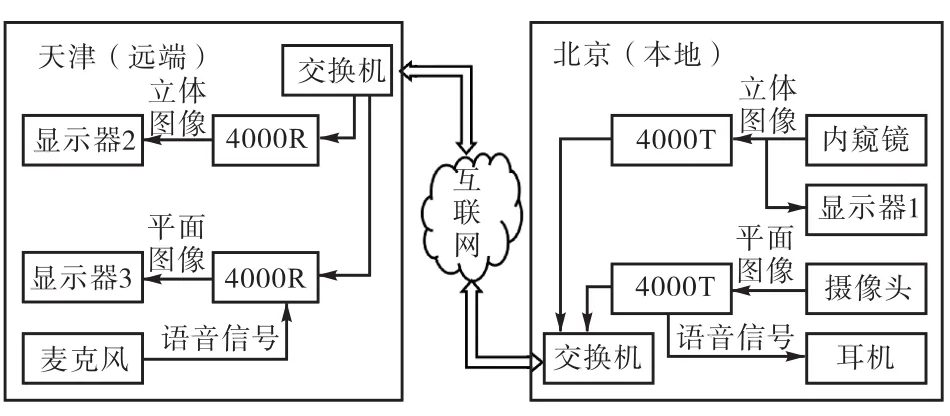
图5 图像反馈系统结构原理Fig.5 Structure principle of image feedback system
4 实 验
作为远程手术机器人系统的一部分,网络延时直接影响到系统的稳定性和可操作性.因此,在微创手术机器人系统远程控制平台开发完成之后,本文进行了北京第二炮兵总医院和天津大学之间多个时段网络环境测试.本文所测试的网络环境参数包括数据包双向传输延时和数据包丢失比率,并在此基础上计算了操作者利用所开发系统可能造成的总延时.在充分了解网络环境特征之后,本文又进行了两地远程套环实验,以验证控制策略和主从跟踪性能.
4.1网络环境测试
为测得远程控制平台网络环境参数,本文开发了专门的软件程序,即发送器和接收器,并分别运行于服务器和客户机.所采用数据包与实际控制信号数据帧的格式和容量相同,并且数据包中加入了表示次序的编号.测试程序同样具有校验机制,校验错误的数据包直接丢弃,这作为数据包丢失的一种情况.测试开始后,发送器按照一定频率发送数据包,并记录数据包编号以及发送时间,接收器在收到数据包并校验正确以后将数据包发回,发送器在收到返回的数据包并校验正确之后记录下数据包编号以及返回时间.最后取相同编号下,返回时间和发送时间的时间差作为数据包双向传输延时,而通过返回数据包数量和发送数据包数量即可得到数据包丢失比率.
为了解一天中网络环境的变化情况,本文利用发送器和接收器软件进行了10组测试.每组测试发送数据包总量均在30,000以上,发送周期均为20,ms,但分布在不同的时间段(取1,h为1个时间段).假定每个时间段的任意10~20,min能够代表该时间段的网络水平.测试条件和测试结果如表2所示.测试结果显示,数据包平均传输延时在9.1~24.6,ms之间变化,一天中8:30—11:30延时变化平稳,13:30—17:30延时变化剧烈,最大平均传输延时在15:30左右,最小平均传输延时在16:30左右,如图6所示.就单次实验而言,尽管最大传输延时很高,但是大部分传输延时集中在平均值附近,如图7所示.另外,10组实验均有数据包丢失现象,但数据包丢失比率较小,最大不会超过4.5%.
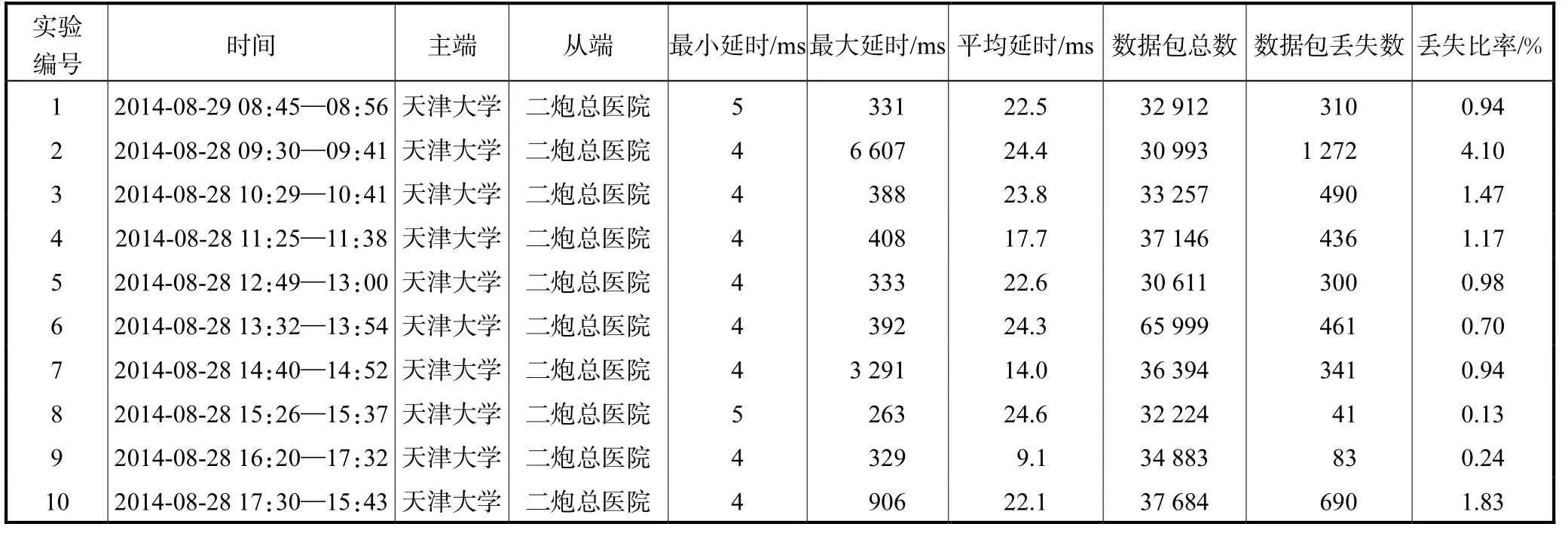
表2 北京、天津网络环境测试条件及测试结果Tab.2 Network environment test conditions and results between Beijing and Tianjin

图6 一天中数据包双向平均延时变化Fig.6 Variation of bidirectionally average delay of packets in one day

图7 实验1中数据包传输延时分布Fig.7 Distribution of transmission delay of packets in experiment 1
测试结果表明网络传输不但存在延时,而且延时具有不确定性,甚至造成数据包丢失.众所周知,互联网具有复杂的拓扑结构,包括物理线路和路由器2部分,而网络延时主要决定于数据所经过的路由个数和在每个路由上所花费的时间.由路由持久性可知,本测试实验中,数据经过的物理线路和路由个数是确定的,但是由于网路具有竞争性和共享性,每个路由器的负载是实时变化的,不同数据包在各个路由上的排队时间和处理时间是不一样的,当路由器的负载超过其处理能力时,将对随后到达的数据包进行丢弃处理[16],因此这就造成了网络延时不确定性以及数据丢失现象.
对于远程手术机器人系统而言,操作者所感受到的总延时t包括远端(主操作手端)服务器伺服周期t1、控制信号单向传输延时t2、本地(从操作手端)客户机伺服周期t3、手术机器人机械响应时间t4、内窥镜成像及图像处理延时t5、图像编解码延时t6以及图像传输延时t7.根据网络延时测试结果,选数据包最大双向平均传输延时的1/2作为控制信号单向传输延时,即t2为12.3,ms;服务器伺服周期t1和客户机伺服周期t3分别为10,ms和8,ms;手术机器人机械响应时间t4为90,ms;经测试,MicroHand手术机器人本地系统的图像反馈延时为120,ms,这部分延时在远程系统中仍保持不变,即内窥镜成像及图像处理延时t5为120,ms;通过生产商所提供的TVI 4000S视频编解码器技术资料及实际测量可知图像编解码延时t6最大为50,ms;在网络带宽足够的情况下,压缩图像传输延时约等于控制信号单向传输延时,即t7约为12.3,ms.将以上所有延时分量加起来,得到远程手术机器人系统总延时t为302.6,ms,即远端操作者操纵主操作手302.6,ms之后才会在显示器2中看到从操作手运动.通过以上分析,可以看出图像反馈延时在远程系统总延时中占据很大比重,而图像反馈延时的大部分是内窥镜本身成像及图像处理延时,为降低图像反馈延时,优化了图像处理算法,另外机械响应延时也不容忽视.本文所开发远程手术机器人系统总延时没有超过Butner等[5]所提出的330,ms延时极限,因此操作者能够利用该平台完成远程操作,而不会因延时受到影响.
4.2远程套环实验
为评估所开发远程手术机器人系统的主从控制性能及手术可操作性,利用该系统进行了北京第二炮兵总医院和天津大学之间(相距大约150,km)的远程套环实验.实验时,主控制台设在天津大学医疗机器人实验室,而手术机器人位于第二炮兵总医院手术室.操作者坐在主控制台前,根据显示器中内窥镜图像,通过操纵主操作手远程控制手术器械在腹腔模型内完成套环操作.操作者具有利用本地手术机器人系统套环经验,并且经过了0.5 h远程操作培训.实验要求操作者左手控制手术器械从一根塑料柱上拾取橡胶环,并通过左右手配合将橡胶环由左手传递至右手,最后操作者右手控制手术器械将橡胶环放置到另一个塑料柱上.实验内容涉及拾取、移动、交换和放置等基本动作,实验过程如图8所示.在整个远程套环实验中,主从跟踪平稳且无误操作产生,整个套环过程共耗时2.5min.
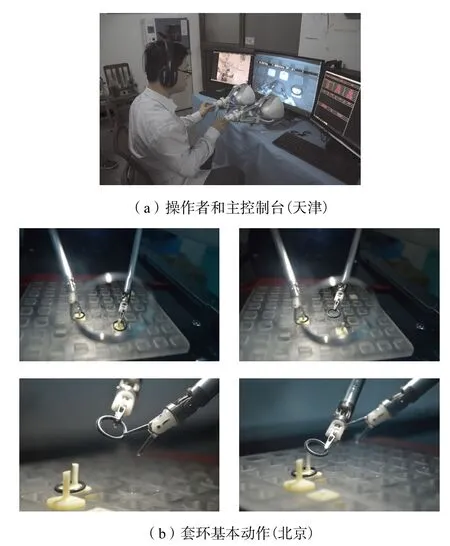
图8 远程套环实验Fig.8 Remote lantern-ring experiment

图9 主从操作手跟踪位移分析曲线Fig.9 Analytic curves of master-slave tracking displacement
为定量分析主从控制一致性以及操作速度、精度和延迟,设计者在实验过程中实时采集了主、从操作手末端位置信息和姿态关节角,并通过matlab软件进行了分析.图9~图11表示的是右主操作手遥控左从操作手实验过程的部分分析结果.由图9位移分析可知,主操作手和从操作手在z方向位移和自转角位移上具有相同的变化趋势,并且从操作手在z方向位移上比主操作手变化平缓,而在自转角位移上与主操作手变化相同,这是由于在主从映射模型中采用增量式控制,并且主从位置映射采用3∶1缩放,而主从姿态角采用1∶1映射;此外,从操作手位移曲线存在滞后现象,这是由控制信号单向传输延时t2和机器人机械响应延时t4造成的.由图10速度分析可知,除去手部抖动的影响,主操作手在z方向上的操作速度位于-50~50,mm/s之间,自转关节角速度位于-8°/s~8°/s之间,由于本地伺服控制系统具有消除抖动功能,因此从操作手速度变化较主操作手平缓.由图11误差分析可知,主从遥控过程中,主从跟踪误差没有积累,具有较好的收敛性;且在z方向位移跟踪误差位于-1~1,mm之间,在自转角位移跟踪误差位于-0.1°~0.1°之间.另外,主从操作手其他关节具有相同的分析结果.综上所述,所开发远程控制平台具有较好的主从跟踪性能和远程可操作性,验证了主从映射模型的正确性.
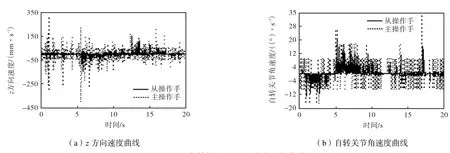
图10 主从操作手跟踪速度分析曲线Fig.10 Analytic curves of master-slave tracking velocity
5 结 语
机器人远程手术是继机器人辅助微创外科手术之后的又一全新领域,它具有为当今医疗手段带来革命性变化的巨大潜力.本文在MicroHand微创手术机器人系统基础上,通过引入并改良小型化主操作手,开发远程控制系统以及图像反馈系统,成功完成了腹腔微创手术机器人远程控制平台开发.不同于美国Computer Motion公司[4-5]开发ZeusTM系统过程,本文保持了原本地系统的完整性,因此开发周期短、消耗经费少.北京-天津远程套环实验结果显示,所开发远程控制平台主从控制性能良好,可进一步根据手术精度和灵活度需求开展远程手术系统开发.后期工作包括完善系统功能,增强系统安全性保障,同时进行更深层次的远程测试,从而为将来动物实验奠定基础.
[1]Guthart G S,Salisbury J K. The intuitiveTMtelesurgery system:Overview and application[C]//Proceedings of 2000 IEEE/ICRA. San Francisco,USA,2000:618-621.
[2]Jacques M,Francesco R. The ZEUS robotic system:Experimental and clinical applications[J]. Surgical Clinics of North America,2003,83(6):1305-1315.
[3]王树新,王晓菲,张建勋,等. 辅助腹腔微创手术的新型机器人“妙手A”[J]. 机器人技术与应用,2011(4):17-21.
Wang Shuxin,Wang Xiaofei,Zhang Jianxun,et al. A new assistant laparoscopic minimally invasive surgery robot “MicroHand A”[J]. Robot Technique and Applica-tion,2011(4):17-21(in Chinese).
[4]Butner S E,Ghodoussi Moji. A real-time system for tele-surgery[C]//21,st International Conference on Distributed Computing System. Mesa,AZ,USA,2001:236-243.
[5]Butner S E,Ghodoussi Moji. Transforming a surgical robot for human telesurgery[J]. IEEE Transactions on Robotics and Automation,2003,19(5):818-824.
[6]Ghodoussi Moji,Butner S E. Robotic surgery-the transatlantic case[C]// International Conference on Robotics and Automation. Washington,USA,2002:1882-1888.
[7]Mitsuishi M,Arata J,Tanaka K,et al. Development of a remote minimally-invasive surgical system with operational environment transmission capability[C]// Proceedings of the 2003 IEEE International Conference on Robotics and Automation. Taipei,China,2003:2663-2670.
[8]Arata J,Takahashi H,Pitakwatchara P,et al. A remote surgery experiment between Japan-Korea using the minimally invasive surgical system[C]// International Conference on Robotics and Automation. Orlando,USA,2006:257-262.
[9]Arata J,Takahashi H,Pitakwatchara P,et al. A remote surgery experiment between Japan and Thailand over Internet using a low latency CODEC system[C]// International Conference on Robotics and Automation. Roma,Italy,2007:953-959.
[10]唐 粲,王田苗,丑武胜,等. 脑外科机器人控制系统的设计和实现[J]. 机器人,2004,26(6):543-547,552.
Tang Can,Wang Tianmiao,Chou Wusheng,et al. Design and realization of robot control system for neurosurgery[J]. Robot,2004,26(6):543-547,552(in Chinese).
[11]吉 尔. 直击中国医用机器人首次远程异地手术[J].解放军生活,2004(1):26-27.
Ji Er. Chinese medical robot remote long-distance operation for the first time[J]. The PLA Life,2004(1):26-27(in Chinese).
[12]刘景泰,孙 雷,陈 涛,等. 竞争型遥操作机器人系统的研究[J]. 机器人,2005,27(1):68-72,89.
Liu Jingtai,Sun Lei,Chen Tao,et al. Research on competitive teleoperating robot system[J]. Robot,2005,27(1):68-72,89(in Chinese).
[13]李 岩,曹 琳,孙 雷,等. 竞争型网络机器人体系结构研究[J]. 机器人,2013,35(4):462-469.
Li Yan,Cao Lin,Sun Lei,et al. An architecture for the competitive networked robot system[J]. Robot,2013,35(4):462-469(in Chinese).
[14]呼日查. 腹腔微创手术机器人主从操作远程控制技术研究[D]. 哈尔滨:哈尔滨工业大学机电工程学院,2011.
Hu Richa. Study on Remote Control Technology of Master-Slave Operation for the Abdominal Minimally Invasive Surgery Robot[D]. Harbin:School of Mechatronics Engineering,Harbin Institute of Technology,2011(in Chinese).
[15]Gao Yuanqian,Li Jinhua,Su He,et al. Development of a teleoperation system based on virtual environment[C]//International Conference on Robotics and Biomimetics. Phuket,Thailand,2011:766-771.
[16]修 震,吴平东,黄 杰,等. 基于因特网的远程控制中网络延时特性分析[J]. 计算机工程与应用,2004,40(3):129-131.
Xiu Zhen,Wu Pingdong,Huang Jie,et al. Analysis of network time-delay property in internet-based telecontrol system[J]. Computer Engineering and Applications,2004,40(3):129-131(in Chinese).
(责任编辑:金顺爱,王晓燕)
Development and Experiment of a Tele-Operated Platform for Minimally Invasive Laparoscopic Surgery Based on MicroHand Robot
Wang Shuxin1,2,Liu Yuliang1,2,Li Jinhua1,2,Li Jianmin1,2,Yang Ruilin1,2
(1. School of Mechanical Engineering,Tianjin University,Tianjin 300072,China;2. Key Laboratory for Mechanism Theory and Equipment Design of Ministry of Education,Tianjin University,Tianjin 300072,China)
Robot-assisted remote surgery is the application of minimally invasive surgery robot technology to remote diagnosis and treatment,which helps to solve the current medical resource maldistribution in our country. Based on the technology and remote control requirements of minimally invasive laparoscopic surgery robot,a tele-operated platform were constructed. The latest H.264 video codec technology and high-efficiency video compression/decompression device were used to solve the problem of image transmission delay and the approach of combining TCP/IP transport protocols and PC check mechanism was adopted to guarantee the accuracy and reliability of remote control data. Integrating the existing MicroHand minimally invasive surgery robot with the constructed tele-operated platform,a demonstration environment of robot-assisted remote minimally invasive surgery between Beijing and Tianjin was set up. On the basis of remote surgery robot system integration,network environment test,covering multiple time periods and remote lantern-ring experiment between these two places were conducted. It is found that the unidirectionally average network delay of control signal between these two places is at most 12.3,ms,the bidirectionally total delay of system is at most 302.6,ms,and the loss ratio of data packages is at most 4.10%. The lanternring experiment results show that the developed tele-operated platform has good master-slave control performance and remote operability and a remote surgical system can be developed further.
minimally invasive surgery robot;tele-operated;TCP/IP;network delay;lantern-ring experiment
TP242.3
A
0493-2137(2015)12-1041-09
10.11784/tdxbz201409075
2014-09-28;
2014-12-16.
国家高技术研究发展计划(863计划)资助项目(2012AA02A606);国家自然科学基金资助项目(51275335).
王树新(1966—),男,教授,shuxinlab@163.com.
李进华,lijinhua@tju.edu.cn.
网络出版时间:2014-12-22. 网络出版地址:http://www.cnki.net/kcms/detail/12.1127.N.20141222.1539.001.html.
