3SPS-1S并联机构的仿人机械臂系统设计
2015-08-30胡磊胡宁王立权李长胜李阳孙贝谢峰于慧勇
胡磊,胡宁,王立权,李长胜,李阳,孙贝,谢峰,于慧勇
(1.哈尔滨工程大学机电工程学院,黑龙江哈尔滨150001;北京航空航天大学机械工程及自动化学院,北京100191)
一般仿人机械手臂,大多采用串联机器人构型[1-3],这种构型的特点是工作空间大、刚度低,负载能力低。为了模仿人手臂7个自由度的运动,串联机器人的电机大多安装在机器人的关节处,直接驱动关节运动。这样,就导致手臂的体积较大。美国航空航天局研究的ROBONAUT2仿人机器人的手臂长度约810 mm。由于并联机构具有刚度大,精度高等特点,很多学者开始研究三自由度并联球关节[4-5],在此基础上,研究仿人机器人手臂[6-8]。为了减少仿人手臂的体积,提高仿人手臂的负载能力,在机器人的动力源方面,一些仿人机器人手臂采用了液压和气动驱动装置[9-10]。由于液压和气动驱动需要庞大的液压站和气压源,无形中增加了机器人系统的复杂性和体积。本文提出一种机-液混合驱动的串并联仿人机械手臂。手臂的腕关节和肘关节采用并联3SPS-1S球心机构,肩关节采用两个转动关节串联而成,串联构型的肩关节增加手臂的活动空间。
论文首先对3SPS-1S并联机构进行运动学分析,建立了数学模型、位置反解模型和基于迭代算法的位置正解模型。搭建并分析基于该并联机构的串并联仿人机械手臂平台。接着,论文提出了一种电-液复合驱动系统,并对该系统的传动性能进行分析和实验验证。同时,针对这种驱动系统,开发了一种基于PID的直流伺服控制系统。最后实验验证了单轴运动精度和仿人机械手臂灵活度。
1 仿人机械手臂的构型分析
仿人机械手臂系统总体结构如图1所示,主要由机械系统和驱动、控制系统组成,首先对机械本体进行分析研究。

图1 仿人机械臂系统结构图Fig.1 Structure diagram of humanoid manipulator system
1.1 3SPS-1S并联机构建模
3SPS-1S仿生并联机构一种新型并联球心腕仿生关节,具有3个转动自由度。该并联机构由3个SPS型活动支腿li(i=1,2,3)和一个S型被动支腿l0组成。3个SPS型活动支腿由液压缸驱动,液压缸两端通过虎克铰与上下平台相连(由于液压缸自身有一个绕轴线的转动自由度,因此可以把液压缸和上下平台连接部分看作球铰)。3SPS-S并联机构三维模型如图2所示。
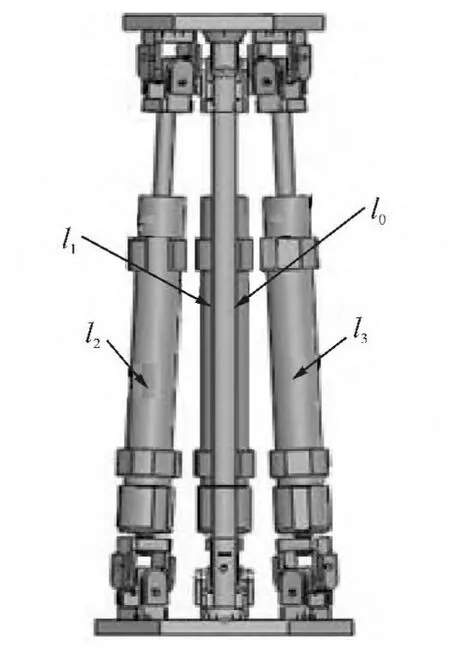
图2 3SPS-1S并联机构三维模型Fig.2 Three dimensional model of 3SPS-1S parallel mechanism
1.2 3SPS-1S并联机构的位置反解
3SPS-1S并联机构下平台为静平台B,上平台为动平台m,动平台能够实现绕3个轴的转动。为了求解方便,假设上、下平台为正三角形结构,并分别在上、下平台建立动坐标系o-xyz和定坐标系OXYZ。动坐标系o-xyz的原点o位于上平台中心,x轴由o点指向a1点,初始位置时,z轴竖直向上,y轴由右手螺旋定则确定。定坐标系O-XYZ的原点O位于下平台中心,X轴由O点指向A1点,Z轴竖直向上,Y轴由右手螺旋定则确定。如图3所示。

图3 3SPS-1S并联机构结构简图Fig.3 Structure diagram of 3SPS-1S parallel mechanism
假设ami为ai点的相对坐标值,aBi为ai点的绝对坐标,ABi为Ai点的绝对坐标值。已知上平台o点到ai(i=1,2,3)点的距离e=18 mm,下平台O点到Ai的距离E=28 mm。上下平台中心的距离Z0=197 mm。上平台按绕z轴、y轴、x轴顺序转动,角度分别为γ、β、α。由图可知,各点的坐标如下
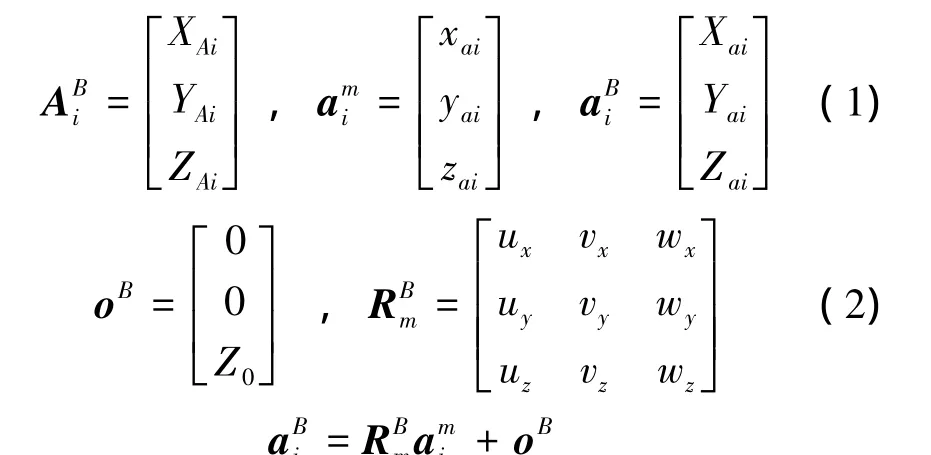
式中:RBm是坐标系{m}到坐标系{B}的旋转变换矩阵。
由几何关系ami和ABi可表示为

旋转变换矩阵为(转动顺序为:绕z轴、y轴、x轴转动):

其中

由aBi=RBmami+oB可求得

其中

由此,每个支腿Li(i=1,2,3)可表示为
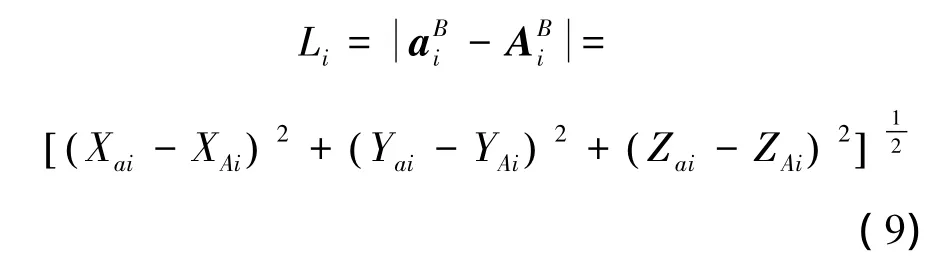
如果已知动平台的转动位姿,即γ、β、α的值,将式(4)、(6)~(8)所得坐标值代入式(9)即可得出每个支腿Li(i=1,2,3)的长度。由此,可得到3SPS-1S球心腕机构的运动学反解。
1.3 3SPS-1S并联机构的位置正解
位置正解是已知每个支腿的长度,求动平台的位姿。假设初始状态动平台的位姿可表示为(X0,Y0,Z0,α0,β0,γ0),由位置反解公式可求得各支腿初始的长度Li0,并且给定的每个支腿长度为Li,因此可求得各腿长变化值:ΔLi=Li-L0i。
由几何关系,设(i=1,2,3):

坐标{m}到坐标{B}的旋转变换矩阵为

矩阵 R 的元素rij(i=1,2,3;j=1,2,3)同 RBm
由位置反解公式:

可知:Li是 (Xp,Yp,Zp,α,β,γ)的函数,因此

为了建立支腿的速度与动平台运动速度之间的关系,对上式求偏导得

同理

由式(10)对α求偏导数可知:

整理得

同理

因此可得
对式(12)两端同时乘以dt,并用所求的ΔLi表示支腿的增量,( ΔX,ΔY,ΔZ,Δα,Δβ,Δγ)表示动平台位姿的增量,则式(20)变为

由于Xp=0,Yp=0,Zp=Z0都为常数,所以 ΔX=ΔY=ΔZ=0,因此式(21)表示为

由初始的位姿 (0,0,Z0,α0,β0,γ0)反解出初始支腿长度L0i的值,给定的支腿长度为Li,则支腿的变化值为ΔLi=Li-L0i。由式(22)用ΔLi的值解出位姿变化值 (0,0,Z0,Δα,Δβ,Δγ)。
令 α0=α0+Δα,β0=β0+Δβ,γ0=γ0+Δγ ,重复以上操作,直到小于指定的允许误差t(10-6)为止。此时 (0,0,Z0,α'0,β'0,γ'0)即为给定支腿长度值Li对应的位姿。
1.4 仿人机械臂平台搭建
仿人机械手臂采用串并联构型设计,为增大工作空间,整体采用串联结构;为提高刚度和运动灵活度,局部采用并联结构。仿人机械臂平台的总体结构如图4所示,主要由5个部分串联组成:肩关节,大臂,肘关节,小臂和腕关节。肩关节由转轴相互垂直的2个转动关节组成,大臂和小臂都由3SPS-1S并联机构组成。
仿人机械手臂的肩关节可以简化为虎克铰,肘关节和腕关节可以简化为球铰,机械臂可以简化为USS结构,结构简图如图5所示。很显然,仿人机械臂的活动度为8个,机械臂末端的自由度为6个。
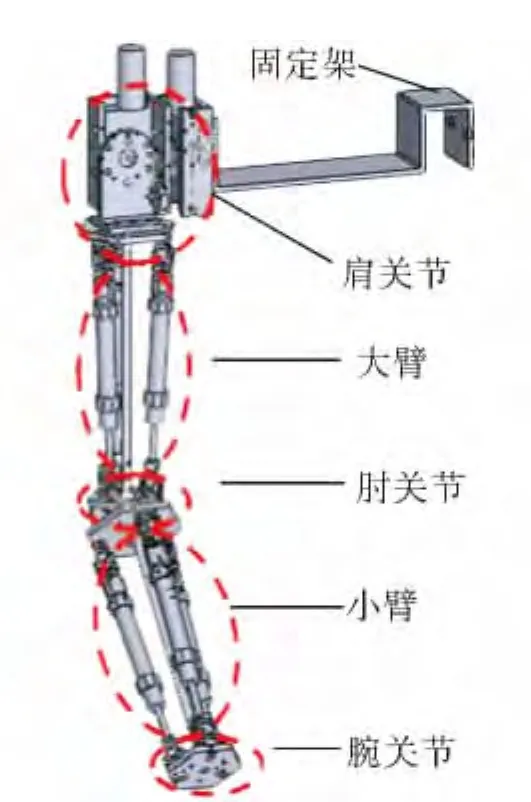
图4 仿人机械臂平台结构图Fig.4 Structure diagram of humanoid manipulator platform

图5 仿人机械臂简化结构简图Fig.5 Simplified structure diagram of humanoid manipulator platform
1.4 仿人机械臂运动空间分析
利用MATLAB对工作空间进行图形化仿真。机器人关节变量的限制范为
θ01∈[0°,90°], θ11∈[0°,90°]
α1∈[-30°,30°], β1∈[-45°,45°]
γ1∈[-45°,45°], α2∈[-30°,30°]
β2∈[-45°,45°], γ2∈[-45°,45°]
利用MATLAB对机器人机构的工作空间的仿真结果如图6所示。
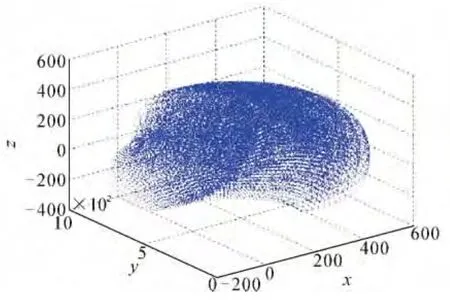
图6 仿人机械臂工作空间分析Fig.6 Working space analysis of humanoid manipulator
2 电-液混合驱动系统设计
2.1 动力传动方案分析
传统的驱动系统主要包括电机驱动,液压驱动和气动等。电机驱动输出功率体积比较小,在大功率输出仿人机器人中的应用受到限制;液压传动具有很好的输出功率体积比,但液压泵噪音较大,且很难得到严格的传动比;气动系统由于空气具有可压缩性,很难做到精确控制,传动刚度低。
仿人机械臂要求体积小,控制精度较高,输出功率较大,传统的驱动方式无法满足要求。因此,本文提出一种电-液混合驱动系统,有效减小传动装置的体积,提供较大的功率和控制精度。
2.2 电-液混合驱动系统分析
单轴的复合传动系统结构如图7所示,主要由直流电机,直线滑台,主液压缸和从液压缸组成。电机通过丝杠控制滑块运动,滑块带动固定在滑台上的主液压缸直线伸缩,主液压缸通过液压管将动力传递给从液压缸,从而控制从液压缸进行精确的直线运动。从液压缸作为3SPS-1S并联机构的支链,为机构提供动力。而且从液压缸连接直线传感器,实时监测支链的运动距离,使系统实现位置闭环控制。

图7 单轴混合驱动系统结构图Fig.7 Structure diagram of single axis hybrid drive system
3 电-液混合驱动的控制系统设计
3.1 驱动控制系统硬件设计
针对仿人机械手臂系统平台,本文自主设计了一套驱动控制系统,其硬件部分主要由可插拔式运动控制板卡和驱动板卡组成。如图8所示,1块控制板卡和8块驱动板卡通过卡槽相连,能够实现多轴直流伺服控制(不超过8轴)。

图8 电机驱动控制系统Fig.8 Motor drive control system
控制系统采用多级控制模式,如图9所示,核心部分分为3层:
1)上层由上位机PC软件控制,通过串口与运动控制板卡进行通讯。
2)中层运动控制板卡基于AVR单片机mega64进行设计。定制通讯协议,响应上位机协议指令,并通过RS485总线与驱动板卡进行通讯,发送运动控制信号同时接收传感器。
3)下层各独立的驱动板卡,能够接收控制板卡传递的控制信号,驱动电机运动。接收编码器信号,最终实现位置闭环控制以及速度半闭环控制。

图9 控制系统结构示意图Fig.9 Schematic diagram of control system
3.2 驱动控制系统软件设计
驱动控制系统软件包括:控制板卡软件系统和驱动板卡软件系统。主要包括2个方面:
1)闭环控制算法实现。驱动板卡采集光电编码器信号和直线位移传感器信号,进行定时采集和AD转换,经过算法处理,给出控制信号参考值,实现位置闭环及速度和电流的半闭环PID控制[11-12]。控制系统模型如图10所示。
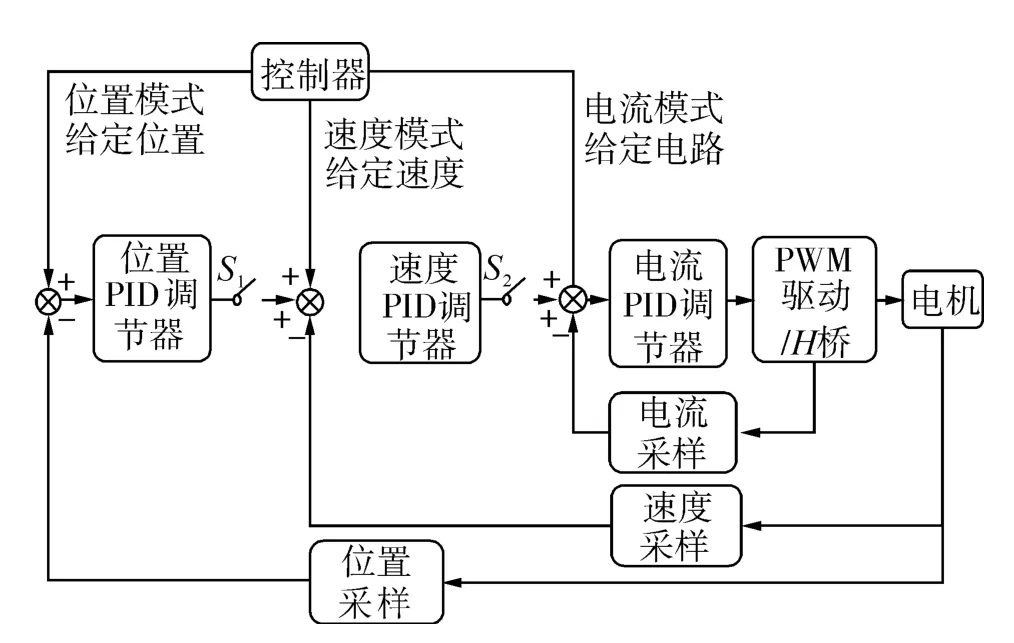
图10 控制系统模型Fig.10 Control system model
2)信息传输,接收上位机传输的指令,对PID参数进行调节,按照上位机位置、速度信息进行运动控制。同时将位置、速度等信息上传给上位机。
3.3 混合PID算法设计
常规的模拟式PID控制系统原理如图11所示。

图11 PID控制系统原理图Fig.11 Schematic diagram of PID control system
模拟式PID调节器的控制规律为

将式(23)离散化,并以T为采样周期,可得:

增量式PID控制算法是指数字控制器的输出只是控制量的增量,其表达式为

通过对基于位置式PID算法与增量式算法优缺点的比较,本文综合了2种算法,提出了一种混合PID算法:在比例、微分部分,采用位置式PID;在积分部分,采用局部增量式PID求和,叠加到位置式PID算法中,其表达式为

混合PID算法的优点为对于目标控制量,能够准确地得到需要的响应速度,并有效的防止超调,同时对于稳态误差,采用增量式积分方法,又可以防止干扰带来的控制量突变。这种控制算法有效的提高系统响应速度,抵抗外部干扰。
4 系统实验
4.1 复合传动系统单轴精度实验
单轴精度实验平台:上位机软件发送指令给驱动控制系统,从而控制电机和液压缸运动。在液压缸末端给定8 kg砝码作为负载。首先记录液压缸初始位置;上位机控制液压缸每次移动10 mm,直至60 mm为止;用游标卡尺测量每次运动完成后液压缸的实际位置,并与理想位置比较,计算位置误差。实验数据如表1所示。

表1 有反馈加负载位置精度实验Table 1 Position accuracy experiment with feedback and load
从表中数据可以分析得到位置精度误差绝对值在0.2 mm以内,误差率小于0.5%。通过实验可以看出复合传动系统有较高的控制精度,满足系统的控制要求。
4.2 机械臂灵活度实验
4.2.1 3SPS-1S 并联机构灵活度实验
3SPS-1S并联机构是仿人机械臂的核心部分,首先对其进行运动灵活度实验。给定4组位姿,反解出3个支腿响应的杆长,控制电机运动,使动平台从初始位姿运动到制定位姿。4组位姿及计算的杆长伸长量如表2所示。

表2 并联机构转角及杆长伸长量Table 2 Angle and rod elongation of parallel mechanism
最终运动姿态如图12所示。

图12 并联机构位姿Fig.12 Position of parallel mechanism
4.2.2 机械臂运动灵活度实验
该实验主要验证机械臂肘部关节的运动范围和运动灵活度,通过上位机软件,控制肘部关节并联机构的3个支腿运动,使小臂从零位分别运动到甚至状态和向前抬起45°状态,并记录运动时间。机械臂从零位运动到伸直状态的时间为2 s,运动到前伸45°的时间为 3.5 s(如图 13 所示)。

图13 机械位姿Fig.13 Different positions of humanoid manipulator
并联机构运动实验验证了3SPS-1S并联机构具有很好的活动度,能够满足肘部和腕部的运动空间要求。仿人机械臂的活动度试验(主要针对肘部关节),验证了仿人机械手臂有较高的响应速度。
5 结束语
针对传统仿人机械手臂体积庞大、刚度低等问题,本文设计了一种实现三自由度球面运动的3SPS-1S并联机构,并建立了运动学模型。搭建了仿人机械手臂平台,并进行相关实验验证。该仿人机械手臂系统具有良好的活动度,工作空间、灵活性均符合人上肢的运动。设计了一种电-液复合驱动系统,并为该系统设计了基于混合PID算法的控制系统,并通过实验验证了仿人机械手臂有较高的响应速度。该方法既避开了国外对机器人核心部件的技术壁垒,又满足服务机器人对运动和动力的需求,为我国服务机器人的驱动系统设计提供了一个思路,有利于我国发展低成本、高性价比的服务机器人产业。
[1]DIFTLER M A,MEHLING J S,ABDALLAH M E,et al.Robonaut 2-The first humanoid robot in space[C]//2011 IEEE International Conference on Robotics and Automation(ICRA).Shanghai:IEEE,2011:2178-2183.
[2]田野,陈晓鹏,贾东永,等.仿人机器人轻型高刚性手臂设计及运动学分析[J].机器人,2011,33(3):332-339.TIAN Ye,CHEN Xiaopeng,JIA Dongyong,et al.Design and kinematic analysis of a light weight and high stiffness manipulator for humanoid robots[J].Robot,2011,33(3):332-339.
[3]赵冬斌,易建强,张文增,等.拟人机器人TH-1手臂运动学[J].机器人,2002,24(6):502-507.ZHAO Dongbin,YI Jianqiang,ZHANG Wenzeng,et al.Arms kinematics on a humanoid robot TH-1[J].Robot,2002,24(6):502-507.
[4]黄田,曾宪菁,倪雁冰,等.球面并联操作机的尺度综合方法[J].自然科学进展,2000,10(8):751-756.HUANG Tian,ZENG Xianjing,NI Yanbing,et al.Scale Synthesis method for spherical parallel manipulator[J].Progress in Natural Science,2000,10(8):751-756.
[5]李秦川,武传宇,沈卫平,等.新型3-PcRnS球面3自由度并联机构[J].机械工程学报,2006,42(11):44-48.LI Qinchuan,WU Chuanyu,SHEN Weiping,et al.Novel 3-PcRnS spherical 3-Dof parallel mechanism[J].Chinese Journal of Mechanical Engineering,2006,42(11):44-48.
[6]戚开诚,高峰,张建军,等.基于人体关节的七自由度仿人手臂设计与分析[J].组合机床与自动化加工技术,2012(12):1-4.QI Kaicheng,GAO Feng,ZHANG Jianjun,et al.Design of a 7-DOF anthropomorphic arm inspired from the structure of human joints[J].Modular Machine Tool& Automatic Manufacturing Technique,2012(12):1-4.
[7]刘辛军,汪劲松,高峰,等.一种串并联结构拟人七自由度冗余手臂的设计[J].中国机械工程,2002,13(2):101-104.LIU Xinjun,WANG Jinsong,GAO Feng,et al.Design of a serial-parallel 7-DOF redundant anthropomorphic arm[J].China Mechanical Engineering,2012,13(2):101-104.
[8]吴伟国,邓喜君,蔡鹤皋.基于改进PYR型全方位关节的7自由度仿人手臂设计[J].中国机械工程,1999,10(12):1345-1346.WU Weiguo,DENG Xijun,CAI Hegao.A new design of a 7-D.O.F anthropomorphic arm based on the improving PYR type omnidirection joint[J].China Mechanical Engineering,1999,10(12):1345-1346.
[9]CHENG Gang,YU Jingli,WEI Gu.Kinematic analysis of 3SPS+1PS bionic parallel test platform for hip joint simulator based on unit quaternion[J].Robotics and Computer-Integrated Manufacturing,2012,28(2):257-264.
[10]Manitoba University Research Results[EB/OL].(2013-09-04).Available:http://journal.fluid-p0wer.net/journal/issue26/fprcentre26.html.
[11]陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2003:52-59.CHEN Boshi.Control systems of electric drives-motion control systems[M].Beijing:China Machine Press,2003:52-59.
[12]王晓明.电动机的单片机控制[M].北京:北京航空航天大学出版社,2007:6-12,83-87.WANG Xiaoming.Single chip microcomputer control of motor[M].Beijing:Beihang University Press,2007:6-12,83-87.