基于谐振频率的微机械加速度计温度补偿方法
2015-07-19刘义冬朱辉杰金仲和
刘义冬,刘 杰,朱辉杰,李 丹,金仲和
(浙江大学微小卫星研究中心,杭州 310027)
环境温度会对MEMS惯性传感器产生重要的影响[1].通常有两种方法来保证其温度特性稳定:一是严格控制传感器的工作温度,二是研究温度与传感器输出信号间的数学模型,采用公式拟合或模型估计的方法建立相应数学表达式,进而采用硬件或软件的方法进行实时的温度补偿[2].
第1种方法由于需要高精度的控温装置,使用场景往往受限.对于第 2种方法,现有的电容式微机械加速度计温度补偿装置往往需要额外增加温度传感器,增加了系统硬件的复杂性.同时由于电容式微机械加速度传感器工作部件与封装管壳之间存在一定温度梯度,使得贴在管壳外表面的温度传感器所测量得到的温度不能够准确地反映内部真实温度信息,即温度的测量值总存在一定的误差,因此,现有的温度补偿装置无法达到较高的补偿精度.
笔者发现弹性梁弹性系数可以作为敏感温度变化的一个参数,该参数的测量可以简便地等效为对谐振频率的测量.基于此,本文提出了一种基于检测谐振频率的温度补偿结构,理论分析和实际测试证明了方案的可行性.
1 微机械加速度计的动态特性
变面积结构的梳状栅电容式微机械加速度计结构模型如图 1所示,主要由质量块、4个 U形梁、固定外框以及质量块下方均匀排布的梳状驱动电极和检测电极构成.

图1 梳状栅电容式微机械加速度计结构示意Fig.1 Structure diagram of comb-bar capacitive MEMS accelerometer

式中:mx为可动质量块质量;cx为阻尼比;kx为弹性系数;x(t)为当前时刻的位移;a(t)为当前输入加速度.将其进行拉普拉斯变换,得
其动态特性[3]可以表示为

代入相关数据,可以得到系统的频率响应曲线,如图2所示.可见当系统工作在谐振频率 fx时,其位移幅度响应最大并且相位为-90°.

图2 加速度计系统频率响应曲线Fig.2 Frequency response of accelerometer system
当在驱动电极的两块极板上分别加上一个直流电压 Vdc和相位正好反相的交流电压 Vac时,质量块所受的力[4]可以表示为

式中:N为驱动电极的对数;l为驱动电极与质量块交叠的长度;ε为空气的介电常数;d为电极与质量块间的间距.
在这个力的作用下,质量块会以一个与 Vac同频率的速率往复振动,通过检测电极并配合适当中心频率的带通滤波器就可以像检测加速度信号一样检测到这个驱动位移信号.由于谐振频率显著大于待检测输入加速度信号带宽(200,Hz),驱动位移信号不会影响系统对输入加速度信号的检测.
系统的谐振频率由质量块的质量mx以及U形梁的弹性系数kx决定,即

mx是一个与温度无关的量,温度对谐振频率xf的影响完全取决于 kx的温度系数.U形梁弹性系数 kx与温度的关系主要与3个因素有关:温度对弹性模量的影响、机械热膨胀和机械热应力[5-6].U形梁的圆弧部分有利于结构中应力的释放,对于相同结构的器件,文献[7]表明在目前工艺条件下热应力不是影响器件性能的主要因素.本文主要分析弹性模量和机械热膨胀随温度变化引起的谐振频率改变.U形梁弹性系数[8]为

式中:E为弹性梁材料的弹性模量;L为弹性梁的长度;R为弹性梁弧形部分中心线的半径;W、H分别为弹性梁的宽度和厚度;n为弹性梁的个数.本文将在第 3节详细分析弹性模量和机械热膨胀随温度变化引起的谐振频率改变并建立模型.
综上所述,可以通过检测加速度计谐振频率来补偿系统零偏.轻微驱动质量块使其工作在谐振频率点处,同时检测输出信号中该频率分量的相位信息θ.当谐振频率随温度改变时,相位值θ亦发生改变,通过实时调整驱动信号频率,使 θ时刻锁定在-90°不变,即表明系统工作在该温度谐振频率下.当然,由于系统其他模块也会带来相位延迟,加速度计谐振时 θ不一定严格等于-90°,可以通过实验测得一个系统谐振时候的θref来作为参考相位.
2 温度补偿
图 3显示了带温度补偿电路的加速度计系统原理.整个系统主要分为模拟电路和基于 FPGA的数字电路两部分:模拟部分主要包括电荷放大器、驱动电路以及 A/D、D/A模块,数字系统包括数字载波产生模块、数字滤波模块、锁相环模块、相干解调模块以及补偿算法模块.

图3 系统原理示意Fig.3 System block diagram
锁相环模块是用于提取谐振频率信息的关键部分,其通过改变频率控制字Fre来使检测到的驱动位移信号相位 θ始终等于参考相位 θref,这样输出的频率控制字即表征了谐振频率.用 fre(t)表示传感器谐振频率与温度的函数关系,α表征频率控制字与谐振频率之间的比例系数,为已知量,那么 Fre与温度 t的关系可以表示为

加速度检测信号可表示为

式中:Acc是由外部加速度输入产生的敏感信号;Bias(t)为电容式微机械加速度计系统的零偏输出信号,是温度的函数.
补偿算法模块主要功能是求解不同温度下补偿量的大小并与加速度检测信号进行运算,得到一个与温度无关的真实外界加速度测量值.其补偿量为

将该补偿量与加速度检测信号做和运算,即可得到最终补偿后的输出,即

通过实验获得不同温度点下系统谐振频率值和零偏输出信号值.利用最小二乘法选取合适阶数多项式对数据进行多项式拟合,可以得到 fre(t)与Bias(t)的解析表达式为

结合式(7)和式(8),代入相关数据,即可利用FPGA乘法器资源完成相应算法,实现温度补偿功能.
3 实验结果与分析
图4所示为梳状栅电容式微机械加速度计SEM照片,其U形梁结构设计参数如表1所示.
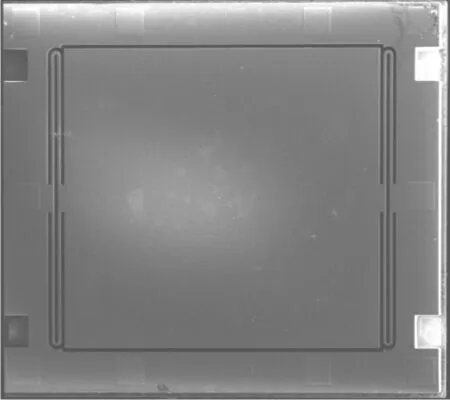
图4 梳状栅电容式微机械加速度计SEM照片Fig.4 SEM photo of comb-bar capacitive MEMS accelerometer

表1 结构参数Tab.1 Structure parameters
对于弹性梁,不考虑机械热应力,可以将其机械热膨胀过程近似为自由膨胀,设 t0=25,℃是设计参数选取的温度点,则不同温度下机械形变为

温度对硅弹性模量的影响起主要作用,其大小为

将式(13)带入式(5)和式(4)中,利用 Matlab进行数值仿真,得到温度曲线如图5所示.

图5 谐振频率温度特性仿真结果Fig.5 Simulation results of characteristics between resonant frequency and temperature

将系统置于温箱中,以 10,℃为步进间隔,测试在-30~60,℃温度范围内,加速度计零偏输出值和谐振频率值.每一个温度点结果取系统平稳输出30,min内数据的算术平均值.
如图6所示,在-30~60,℃,加速度计谐振频率随温度基本呈线性变化,其一次项拟合结果为

一次函数可以简单地通过乘法和加法运算求取反函数,易于实现,故对其进行一次项拟合,结果为
温度系数与仿真结果基本一致,验证了之前温度模型的合理性.仿真与实际测量结果的差异主要在谐振频率的绝对数值上,其主要来源是表头实际加工过程中的工艺误差,它会导致实际制作出来的表头部分参数偏离设计指标.
加速度计零偏输出与温度也近似呈线性变化,如图7所示.同样对其进行一次项拟合,即

可以算出补偿量为

写入 FPGA补偿算法模块.重复温度实验,验证温度补偿电路实时补偿效果,测试结果如图 8所示.结果表明,补偿后系统温漂峰峰值 46.0,mg,远小于补偿前的541.8,mg.
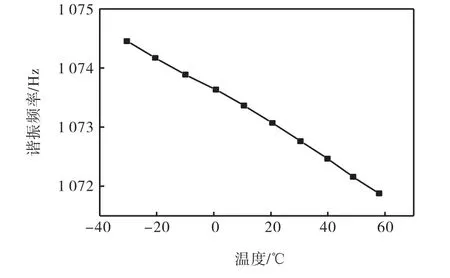
图6 谐振频率温度特性测试结果Fig.6 Test results of characteristics between resonant frequency and temperature

图7 系统零偏温度漂移Fig.7 Zero bias drift of the system at different environmental temperatures

图8 温度补偿后系统零偏温度漂移Fig.8 Zero bias drift of the system at different environmental temperatures after compensation
4 结 语
基于谐振频率的微机械加速度计温度补偿方法,不需要热敏电阻或集成温度传感器,同时由于直接检测的是加速度计工作部件的温度信息,避免了因封装产生的温度梯度,减小了温度测量误差,提高了补偿精度.实际测试表明,温度补偿后系统温漂峰峰值由补偿前541.8,mg降到46.0,mg,满足应用需求.
[1] Shcheglov K,Evans C,Gutierrez R,et al. Temperature dependent characteristics of the JPL silicon MEMS gyroscope[C]// Aerospace Conference Proceedings,2000 IEEE. Big Sky,MT,USA,2000:403-411.
[2] Yang Jinxian,Yuan Gannan. Temperature drift modeling for micro-mechanical gyro based on grey system[C]//IEEE International Conference on Grey Systems and Intelligent Services. Nanjing,China,2007:567-570.
[3] Ko Hyoungho,Cho Dongil Dan. Highly programmable temperature compensated readout circuit for capacitive microaccelerometer[J]. Sensors and Actuators A:Physical,2010,158(1):72-83.
[4] 熊 斌. 栅结构微机械振动式陀螺[D]. 上海:中国科学院上海微系统与信息技术研究所,2001.Xiong Bin. Fence Structure Micromachining Vibratory Rate Gyroscope[D]. Shanghai:Shanghai Institute of Microsystem and Information Technology,Chinese Academy of Sciences,2001(in Chinese).
[5] Painter C C,Shkel A M. Structural and thermal modeling of a z-axis rate integrating gyroscope[J]. Journal of Micromechanics and Microengineering,2003,13(2):229-237.
[6] Xia D,Chen S,Wang S,et al. Microgyroscope temperature effects and compensation-control methods[J].Sensors,2009,9(10):8349-8376.
[7] 游侠飞,吴昌聚,郑阳明,等. 基于有限元法的MEMS 加速度计热应力分析[J]. 传感技术学报,2012,25(2):193-197.You Xiafei,Wu Changju,Zheng Yangming,et al.Thermal stress analysis of MEMS accelerometer based on finite element method[J]. Chinese Journal of Sensors and Actuators,2012,25(2):193-197(in Chinese).
[8] 陈 永. 基于滑膜阻尼效应的音叉式微机械陀螺研究[D]. 上海:中国科学院上海微系统与信息技术研究所,2004.Chen Yong. Research of Tuning Fork Type Micromachined Gyroscope Based on Slide-Film Damping[D].Shanghai:Shanghai Institute of Microsystem and Information Technology,Chinese Academy of Sciences,2004(in Chinese).
