一体化实时仿真平台技术的发展与展望
2015-07-09周振浩李艳雷孔文华金晓旭张津源
刘 金,周振浩,李艳雷,孔文华,金晓旭,张津源
(北京机电工程研究所,北京 100074)
0 引言
各类飞行器具有非线性、不确定性、多层次性和变化大等特点。随着技术的发展,复杂程度不断提高。与此同时,飞行器仿真技术也逐渐向支持飞行器系统的“三全”方向发展,即全寿命(包括论证阶段、方案阶段、研制设计阶段、生产布置阶段和使用保障阶段),全系统(包括主要装备、支持装备、保障装备)和管理全方位[1]。这种发展趋势带来了以下四类新的仿真需求:
1)计算机技术的发展和深入应用使仿真对象性能变得更加高效,对仿真系统高性能实时计算能力带来了挑战;
2)随着飞行器系统对研制质量、研制周期要求不断提升,对仿真建模标准化、通用化、平台化等提出了更高的要求;
3)仿真应用深度和应用领域不断拓展,飞行器系统仿真平台的体系结构、资源布局、开放性和集成能力日益成为关注的重点;
4)多领域复杂飞行器系统的仿真系统设计,需要发展建模仿真全过程工具集的支持,以降低用户工作强度,提升建模仿真资源的重用性、共享性和可靠性。
基于飞行器系统研制的一体化实时仿真平台技术是集仿真建模、高性能实时计算、实时运行控制、高速实时通讯于一体的试验验证关键技术。它适用于飞行器的方案论证、设计、测试、评估、训练、保障维护等全生命周期过程。
满足飞行器发展需求的一体化实时仿真平台,通常应具备以下几个特点:
1)提供高性能强实时仿真运行环境。具备稳定控制帧周期的能力,具备高精度时钟同步控制能力,具备实时接口通信能力;
2)具备通用化建模能力。提供统一的仿真建模语言,具备图形化建模开发及验证环境,实现复杂系统的建模;
3)具备仿真模型资源的统筹优化与管理能力。包含仿真模型库、故障模型库、模式库等,支持基于数据库的面向对象模型类的管理和重用;
4)具备高性能实时计算及海量数据存储能力。能在规定的时间内完成复杂的计算任务,具备海量数据的实时存储能力;
5)系统具有良好的扩展性和较强的通用性。采用具有良好扩展能力的系统体系框架,可灵活、快速地增强仿真系统的功能或性能,满足不同仿真系统的通用需求。
典型的一体化实时仿真平台通常可分为网络平台、硬件平台、软件平台、基础支撑和功能模块五个层次,如图1所示。
1 国内外研究现状及对比分析
1.1 国外一体化实时仿真平台技术
随着信息技术的发展,相关概念,如面向服务的体系结构(SOA)、网络化、智能化和虚拟化等,逐渐被引入到仿真平台技术框架中,以提高仿真系统的效能,促进仿真的可重用、互操作、可组合[2]。新型体系结构的涌现给实时仿真平台带来了重要的机遇和挑战。国外的研究机构已经展开了利用新型体系结构对实时仿真平台的研究与探索,比较典型的有以下几类产品。
(1)dSPACE实时仿真平台
dSPACE实时仿真系统是由德国dSPACE公司研发的控制系统仿真测试平台,与Matlab/Simulink/RTW兼容,并实现了无缝连接,具有以下特点:
a.运算功能较强:采用高速处理器构建专门仿真运算卡,能够独立高效地完成控制系统以及控制系统半实物仿真的计算任务,同时也能与其它板卡联合进行实时计算。
b.接口功能丰富:通过选择不同的I/O配置,即可组成不同的应用系统。
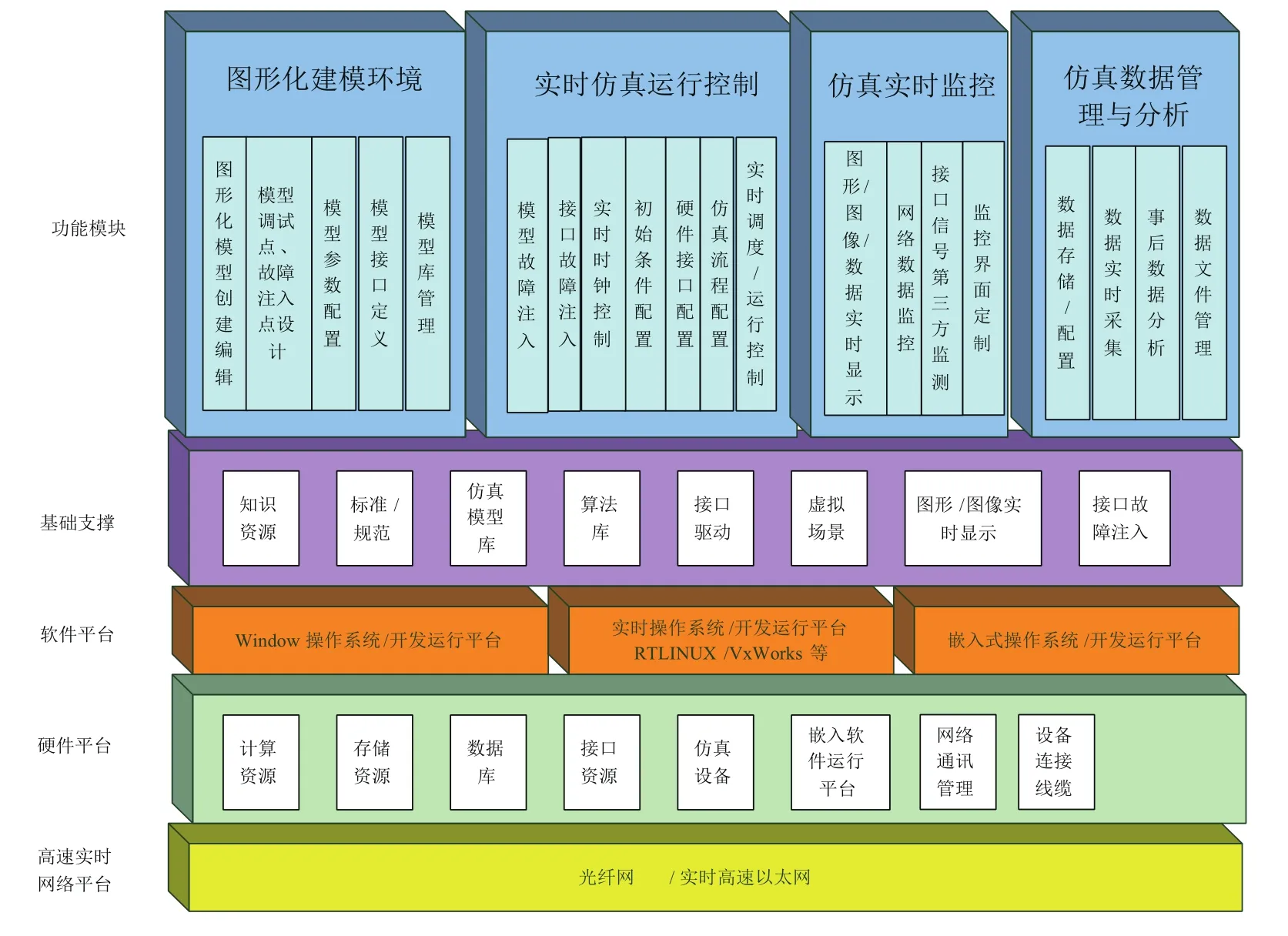
图1 一体化实时仿真平台Fig.1 Integrated real-time simulation platform
c.支持系统原型的快速建模:能在较短时间内完成模型/参数的修改、代码的生成及下载。
d.通用性好:代码生成及下载软件、试验工具软件均基于WINDOWS,软件开发平台为Matlab/Simulink环境。
e.实时性较好:代码可独立运行于实时系统,在不中断试验过程的前提下,通过内存映射访问各种试验参数及结果变量[3]。
(2)RT-LAB实时仿真平台
RT-LAB是一种基于模型的工程设计应用平台,实现工程项目的设计、实时仿真、原型与硬件快速在回路测试,具有以下特点:
a.系统的开放性和可扩展性较好。可自主选择实时仿真系统的构建方式和软硬件模块。支持单节点、分布式和嵌入式目标机3种系统配置,采用上下位机结构和QNX实时操作系统。
b.接口功能较强。在分布式节点系统配置下,每个节点可采用COTS接口卡连接外部设备。
c.建模功能丰富。兼容Matlab/Simulink等多种仿真建模软件。
d.运行监控特性突出。在多个目标机或者对称多处理器(SMP)计算机上,各分布式节点可同步运行,具备集成显示和监控面板,提供动态信号跟踪、在线参数编辑功能。
(3)iHawk实时仿真平台
美国并行计算机公司研制开发的iHawk实时仿真工作平台是基于ConCurrent RedHawk Linux实时操作系统,支持PCI或VME总线及对称多处理器(SMP)的实时仿真计算平台,已广泛应用于世界各地的航空航天、船舶、兵器、核工业、水电、交通等领域。iHawk仿真平台具有如下特点:
a.实时仿真运算功能较强。采用实时操作系统和多核芯处理器,具有稳定的帧周期控制。
b.具备高性能的I/O接口和完善的I/O控制能力,使得用户有充分的选择余地来搭建自己的系统,为自己的板卡订制驱动程序。
c.模型开发工具丰富。提供图形化建模与调试开发工具,支持Matlab/Simulink模型、C/C++模型开发,支持灵活的IO映射,提供实时调试的优化、分析、跟踪辅助工具。
d.仿真运行环境功能较强。配有实时操作系统、图形化建模与调试开发工具、测试开发集成环境、辅助实时调试环境等软件和接口驱动与实时调度软件等。
1.2 国内一体化实时仿真平台
国内开展一体化实时仿真平台技术研究和工程应用实践多年,用于飞行器研制,取得了许多重要成果。从20世纪90年代开始,先后研制成功银河仿真II型计算机YH-F2、银河超级小型仿真机、海鹰实时仿真工作站(HY-RTS)等,其性能已达到国际先进水平。进入21世纪,国内研制成功了基于通用计算机的YH-Astar高性能实时仿真平台、海鹰实时仿真平台HY-RTSIII等产品,为飞行器实时仿真和半实物仿真提供了完整的解决方案。
(1)YH-Astar高性能实时仿真平台
YH-Astar为国防科技大学计算机学院研制的基于通用计算机的高性能实时仿真平台,硬件结构采用通用计算机和COTS接口,通用性、扩展性较好。
其中,一体化建模与实时仿真软件YH-SIMLAB包括仿真建模环境、编译器、调试器、多变量函数生成器、函数库、模型库、实时网API、I/O通信库、人机交互环境和曲线显示与分析子等系统,具有以下功能:
a.YHSIM++语言支持直接用微分方程、差分方程建模。
b.提供了大量仿真专用函数和模型,支持连续系统和离散事件仿真。
c.提供高效的语言翻译器,可将仿真程序转译成C语言代码,支持代码优化及仿真语言的跟踪、调试。
d.提供高效的设备驱动程序及I/O通信库,支持对I/O设备的高速访问,支持在线网络通讯。
e.具备强大的实时数据处理,事后分析功能,可同步显示数据曲线。
(2)HY-RTSIII实时仿真平台
HY-RTSIII实时仿真平台是由航天三院三部研制的新一代实时仿真集成环境。该系统针对飞行器研制全生命周期,为用户提供通用、开放的仿真平台和安全、可靠的仿真环境。适用于卫星姿态控制加载仿真、制导武器仿真、无人机仿真、水下航行器仿真及其它领域的控制仿真,具有如下特点:
a.具有开放性的体系结构。采用标准工业控制计算机,提高了平台的可维护性。
b.实时仿真运算功能强大。自主研发的基于Linux的专用操作系统,具有稳定的帧周期控制和时钟控制,具备实时仿真、大数据实时存储能力。
c.采用具有自主知识产权的高速实时光纤网络,解决了仿真系统组网、设备互联与仿真数据实时传输等技术难题。
d.提供高性能的实时I/O接口,具备完善的I/O控制和多种形式的数字I/O驱动能力。
假设3a没有得到支持可能的原因是,很多企业在生产过程中难以摆脱原有的惯性,企业中高层领导者不愿意改变现有的管理方式。而且企业只依靠现有的资源进行创新是不够的,应该将现有资源进行整合和积累,没有这个过程,企业很难进行技术创新。
e.提供图形化、模块化、参数化的通用仿真建模工具,具有丰富的飞行器模型库、故障模型库、算法库,可与Matlab/Simulink等模型实现无缝连接,支持用户对仿真资源的升级、扩充和管理。
f.采用时间驱动与事件驱动相结合方式,构建仿真框架,通过该框架控制组件的运行。
g.设计了独特的硬件抽象层模块。可以统一管理计算机的接口资源和实时模块资源。
1.3 国内外现状对比分析
通过以上对国内外一体化实时仿真平台技术发展现状介绍可知,国外相关产品在计算能力、实时性能、通讯能力、功耗、可靠性等方面具有明显优势,产品集成度、成熟度较高,通常具有更高性能的硬件设备和开放式架构,更高效的仿真建模和仿真运行控制环境。但在航空航天、武器装备研制等特定应用领域,其灵活性和适用性稍显不足。表现在,缺乏相应的模型库、算法库等仿真支撑资源,应用维护成本高、二次开发困难、价格昂贵。因此研究和探索与我国武器装备发展需求相适应的,具有自主知识产权的高性能一体化实时仿真平台意义重大。
2 主要研究方向及发展重点
随着国内飞行器的发展,一体化实时仿真平台需重点开展总体架构、仿真建模、仿真支撑等方面的研究。
2.1 一体化实时仿真平台总体技术
一体化实时平台总体技术是一体化实时平台构建的基础。需要从需求牵引、技术推动和工程研制角度出发,开展以下几方面的研究:
一体化仿真平台(系统)体系结构;
一体化仿真平台资源规划统筹和综合管理;
仿真系统的综合集成。
体系结构研究是一体化仿真平台总体技术的关键,其主要实现以下目标:
1)从纵向上来说,体系结构应综合应用各类仿真技术,实现对飞行器系统研制全过程的仿真验证,支撑飞行器品质改进,降低研制成本。
2)从横向上来说,体系结构应能实现仿真资源的优化统筹,扩大仿真规模,提升仿真系统快速获取互补性资源的能力。
一体化实时仿真平台体系结构通常采用分层的方法,对仿真资源和仿真控制进行管理。通过对仿真平台体系结构进行层次化设计,确定每一层次的功能模块以及各层次之间的相互支撑关系,进行仿真资源的合理布局,对各类仿真资源进行有效和统一管理,使之成为有机整体,从而实现仿真资源的高度重用和高度共享。
层次化的一体化实时仿真平台体系架构由系统服务层,仿真运行环境层、仿真开发环境层、仿真应用管理层等组成。如图2所示。
2.2 通用仿真建模技术
以模块化、参数化、通用化为核心的仿真建模平台需要提供统一的仿真建模语言,实现复杂系统的建模、验模,使目标系统研究人员专注于问题本身。
为满足这样的需求,通用仿真建模需从以下几方面进行研究:
1)模型标准化。标准化的模型定义是仿真建模的基础和依据,它不仅要描述建模对象的特性、输入输出、状态发展变化,而且需要明确与其它模型间的协调关系。因此,在模型标准研究中,需要研究如何描述模型的内特性、外特性及与其它模型间的数据通信机制。
2)模型分析策略。结合系统辨识等方法高度抽象提取影响模型状态变化的关键参数,设计合理的模型组件架构与组件装配方法,对模型资源进行充分发掘,提炼得到标准的模型组件。
3)异构模型集成。支持异构模型间的接口转换,实现基于不同图形建模环境产生的异构模型协同工作。
4)建模环境构建。在模型参数化和组件化设计思想指导下,构建灵活的建模环境,实现仿真模型由简到繁,由分散到集中的建立过程。
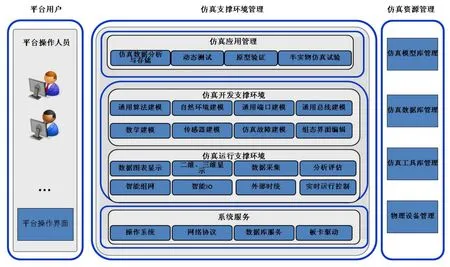
图2 层次化的一体化实时仿真平台体系架构Fig.2 System architecture of hierarchical integrted real-time simulacion platform
2.3 一体化仿真支撑技术
一体化仿真支撑技术是支持优质、高效完成系统建模、仿真试验与仿真结果分析评估等活动的重要手段,是将一体化仿真理论研究成果转化为工程应用的中间环节,包含大量其他领域的专业知识,可以直接指导各类平台化产品的研发与集成。主要包含仿真标准与规范、仿真VV&A,仿真支撑软件和仿真支撑硬件等。
对于飞行器系统仿真,需要重点关注以下几个问题。
(1)实时运行技术实时运行技术需要从以下几个方面进行研究:a.仿真运行平台。要求性能稳定、计算效率高、具备多种类型的总线和外部接口,支持高效数据通信及系统内部时钟同步。硬件平台包括仿真节点和通讯产品。仿真节点要求具有稳定性,针对具体仿真应用可升级可定制;通讯产品需要具备高带宽、低延迟,时间确定性等特点;软件平台包括操作系统、开发工具、数据库等,要求技术成熟、功能齐全,实时性能优越,技术支持和资源丰富等。
b.实时操作系统。结合仿真系统实时性需求,研究评价系统实时性指标的方法。针对处理器的实时调度策略、高精度定时技术、数据实时存储技术、接口实时驱动技术、硬件抽象层设计技术,开展实时操作系统性能优化设计。
c.实时仿真调度。研究仿真人机交互、接口动态配置与实时驱动、仿真流程配置、系统运行管理等。尤其要关注在仿真模型和仿真数据的驱动下,正常仿真/故障模式仿真流程的实现机制。
(2)实时通讯技术
实时通讯技术需要从以下几个方面进行研究:
a.实时网络通讯方法。研究数据、命令、中断等各种消息的实时传输机制,包括通讯数据校验、错误处理、时标同步等。
b.高速通讯及高速电路设计。一体化实时仿真平台应包含实时通讯接口、高速交换机,支持各类信号(数字量、模拟量等)的远距离传输等,一般涉及采用Gbps以上高速通讯接口电路、高速集成电路设计技术。
(3)基于组件的通用仿真框架系统运行控制技术
a.通用仿真框架设计。需要将实时仿真系统采用的运行控制机制,嵌入在通用仿真框架的底层,并通过该框架的底层驱动,控制组件运行。
b.接口和建模工具组件化。仿真平台的人机交互界面模块可采用组件化的接口和建模工具实现,以利于平台的统一调度和运行控制,统一管理计算机的接口资源和实时模块资源,设计硬件抽象层模块,提升实时仿真平台的性能。
3 发展展望
随着计算机技术的高速发展,一体化实时仿真平台技术呈现以下发展趋势:
1)适应各类复杂实时仿真需求且具备标准化、规范化和开放性的特点。
对于复杂飞行器系统,要求在更苛刻的帧周期内,完成更复杂的模型解算和接口操作。需要综合利用并行计算技术、基于FPGA的计算硬件技术和分布式集群网络化技术等,为新一代飞行器提供完善的实时解决方案;需建立一体化实时仿真平台标准,构建更加开放的平台共用体系结构,以满足不同类型飞行器、不同研制阶段的仿真需求。
2)更高效、方便、实用的通用仿真建模平台。构建图形化、参数化、组件化的通用仿真建模平台,实现海量经验模型数据的挖掘,以满足新一代飞行器制导控制系统复杂设计、原型快速搭建和半实物仿真试验验证需求。
3)智能化的高速仿真实时网络。随着飞行器的发展,飞行器系统将日益复杂、功能更加强大,用于飞行器性能验证的仿真系统复杂度剧增,如:非标设备数量快速增加、仿真节点数量急剧增大,满足强实时、灵活接入、大数据量交互和高可靠性的智能高速仿真实时网络将是实时仿真实现的关键。
4 结论
本文针对飞行器的仿真需求,对国内外一体化实时仿真技术发展现状进行了综述,详细分析了一体化实时仿真技术的主要研究内容和研究重点;针对未来飞行器的发展需求,对一体化化仿真技术的发展趋势进行了初步展望,以求为相关技术的发展和应用提供有益借鉴。
[1]黄柯棣,等.作战仿真技术综述[J].系统仿真学报,2004,16(9):1887.
[2]赵冉,陈卫东.水下航行体控制系统半实物仿真研究[J].中国舰船研究院.
[3]马培蓓,吴进华,纪军,徐新林.dSPACE实时仿真平台软件环境及应用[J].系统仿真学报,2004.
[4]陈宇宙.实时仿真平台RT-LAB及其在飞行器设计上的应用研究[D].湖南:国防科技大学,2007.
[5]陈晓刚,应希纯.基于QNX实时操作系统的PMU软件框架[J].机电工程.
[6]曹建国,张红宇.导弹武器系统开发中的仿真机系统综述[J].计算机仿真,2004.
[7]王彦恺,高立娥,康凤举.基于ADRTS仿真计算机的多任务调度方法研究[J].船舶电子工程,2004.
[8]王书.基于DSPACE多控制对象实时仿真平台的智能控制算法研究[D].四川:西南科技大学,2007.
[9]王涛,邹毅军,年晓红,胡毅.基于PC-Cluster的高性能电力系统实时仿真平台eMEGAsim系统仿真[J].2009.
[10]单勇.实时半实物仿真平台关键技术研究与实现[D].湖南:国防科学技术大学,2010.
[11]孙晖,徐林,杨乾远,刘学,袁云飞.基于反射内存的计算机实时通信网络广西通信技术[J].2008.
[12]Dr.Herbert Hanselmann,E/E Data Management Instead of Chaos 2012.
[13]Dipl.-Ing.SonjaLillwitz,Profiting from Change SCALEXIO:New HIL Technology for New Test Requirements 2012.