闭环光纤陀螺量程扩展方法研究
2015-07-09杨银川郭俊超
杨银川,郭俊超,许 毅
(贵州航天控制技术有限公司,贵州贵阳 550009)
0 引言
闭环光纤陀螺相对于传统机械陀螺的一个很大的优点就是能够实现较大的测量范围,最大可达上千度每秒以上,能够覆盖几乎全部战术武器系统的应用需求。通常可以通过减小光纤环圈的等效面积(长度或者直径)来扩大光纤陀螺的量程,但是在测量精度和量程的要求都比较高时,单靠减小光纤环圈等效面积通常无法满足要求。因为较小的光纤环圈等效面积意味着信噪比下降,无法保证测量精度;较短的光纤长度意味着较短的渡越时间,信号处理和检测难度加大;较小的光纤环圈直径意味着光纤所受弯曲应力较大,影响可靠性和寿命。因此,必须结合光纤陀螺干涉响应的特点,从闭环控制原理及信号处理的角度出发,来研究闭环光纤陀螺量程扩展的其他方法,以解决大量程和高精度的矛盾。
1 闭环光纤陀螺工作原理
当载体绕垂直于光纤环平面的轴有旋转时,根据Sagnac效应[1],光纤环中沿顺时针和逆时针方向传播的两束光就会产生与旋转角速率Ω成正比的相位差Δφs,其与旋转角速率Ω的关系可以表示为[2]式(1)。

式中:L为光纤长度,D为光纤环直径,λ为真空中的光波长,c为真空中的光速。
在闭环控制的情况下,当有Sagnac相位差时,会通过反馈产生一个反馈相位差ΔφFB,该相位差与Sagnac相位差大小相等,符号相反,从而抵消Sagnac效应,即见式(2)。

反馈相位差ΔφFB即为闭环光纤陀螺的输出,该相位差是通过测量干涉光信号获得的。当没有相位调制时,到达探测器的干涉光信号曲线见图1

图1 输出光强与sagnac相移的关系Fig.1 The relationship of output light intensity and sagnac phase
可见,到达探测器的光强是相位差Δφs的周期性偶函数,两者之间并不是单值对应关系。为了保证两者之间的单值对应关系,一般将关于零点对称的单值范围(单级干涉条纹)称为光纤陀螺的最大测量范围,即图1中以0为中心的2π范围。当相位差为π时对应的角速度即为单条纹工作可测量的最大角速度,可以表示为:

从式(3)可知,通过减小光纤环的等效面积(LD)可以扩大光纤陀螺的测量范围,但相应地会降低光纤陀螺的信噪比和灵敏度[1],必须考虑其他扩大量程的方法。
2 量程扩展方法
2.1 跨条纹调制法
闭环光纤陀螺中,不论Sagnac相位差多大,只要反馈相位差能够抵消Sagnac相位差,陀螺就能够工作在零位附近,而没有测量范围的限制。通过跨条纹工作,可将光纤陀螺的闭环反馈满量程相位差由原来的2π扩展到2nπ,根据式(2)可得:

以±π/2方波调制为例,当输入角度产生的相位差小于±πrad时,对应的探测器输出波形见图2。从图中可见,当角速度产生的相位差为0~πrad时,探测器输出奇数次采样结果与偶数次采样结果相减始终为负;当角速度产生的相位差为-π~0rad时,探测器输出奇数次采样结果与偶数次采样结果相减始终为正,此时陀螺数字解调结果与输入角速度具有一一对应的关系[3]。

图2 单级条纹内的调制原理(±π)Fig.2 The principle of modulation method in unipolar interference strip(±π)
当输入角速度产生的相位差小于2πrad时,对应的探测器输出波形见图3。从图中可见,相位差为π~2πrad和0~πrad时的解调结果符号相反,相位差为-2π~-πrad和-π~0rad时的解调结果符号相反。此时陀螺仍然能够正常闭环工作,但是需要根据陀螺工作的条纹来获得正确的解调结果[3]。

图3 多级条纹内的调制示意图(±2π)Fig.3 The scheme of modulation in multilevel interference strip(±2π)
通常有两种方法来确定光纤陀螺工作在哪一级干涉条纹:一种是利用各级干涉条纹的光强变化确定条纹级数,但是各级干涉条纹间的光强变化很小,很难准确判断;第二种是采用双敏感环的方案[3],但方案复杂,检测难度增大,不易实现。
2.2 单级条纹的量程扩展
根据闭环光纤陀螺的工作原理可得光纤陀螺闭环内标度因数[1]

式中N为D/A转换器位数。
陀螺输出数字量的位数可以与反馈数字量不同,如果输出的最低有效位比D/A转换器的最低有效位低M位,则输出标度因数K是内标度因数的2M倍,因此闭环光纤陀螺的标度因数可以表示为式(6)。

此时,闭环光纤陀螺输出的N+M位数字量以及D/A转换器的N位数字量与陀螺的单级条纹最大测量范围满量程±Ωπ是一一对应的。下面以某型光纤陀螺为例,D/A转换器为16位,陀螺输出数据位28位,光纤环等效面积10.8m2,当反馈数字量取自速率寄存器的第28~13位时,可得该陀螺单级干涉条纹最大测量范围约为1050(°)/s,其内部各寄存器的位数变化见图4。

图4 寄存器位数变化Fig.4 The change of register digit
陀螺闭环工作后,当输入角速度超出单级干涉条纹最大测量范围时,因为28位的数据无法表达大于±Ωπ的角速度,角速度寄存器必然溢出。假设角速度寄存器的位数足够大,则会在第29位产生进位或者借位,角速度寄存器每增加L位,量程就扩大2L倍。此时输入角速度Ω对应的Sagnac相位差可以表示为式(7)。

式中-π≤Δφs<π,为第一级干涉条纹内的Sagnac相位差(图5)。
Δφs'对应的理论反馈数字量为

式中0≤DF<2N,为由D/A转换器位数决定的实际反馈数字量。
由图5可知,根据闭环反馈原理,可以获得大于单级干涉条纹量程的Sagnac相位差

因此,只要保证光纤陀螺工作在第一级干涉条纹内,就可以通过增加角速度寄存器的位数来扩展光纤陀螺的量程。
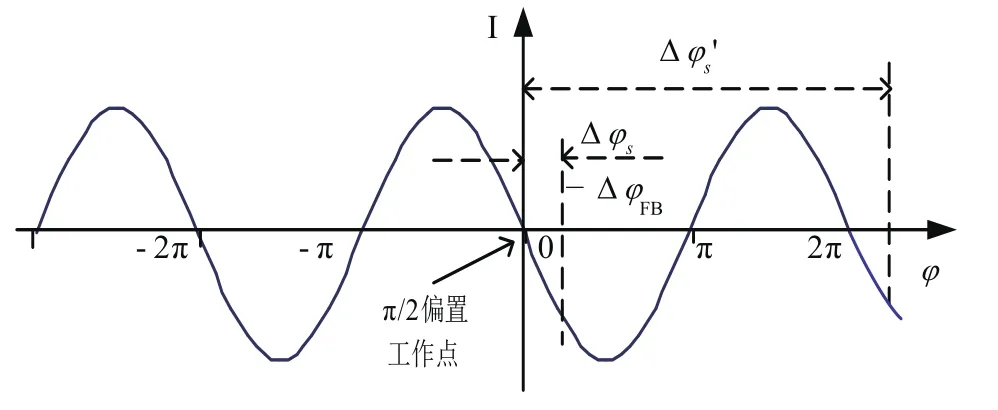
图5 单条纹工作量程扩展示意图(n=1)Fig.5 The scheme of unipolar interference strip based range extension(n=1)
同理,如果保持角速度寄存器位数不变,根据式(6),M减小n,标度因数减小2n倍,则相同位数的角速度寄存器可以表示的角速度也会增大2n倍。以某型光纤陀螺为例,反馈数字量取自角速度寄存器的第7~22位,则该陀螺单级条纹最大测量范围约为67200(°)/s,其内部各寄存器位数变化见图6。

图6 寄存器位数变化Fig.6 The change of register digit
因此,在不增加陀螺输出数据位数的情况下,可以通过改变反馈数字量相对于角速度寄存器的位置来扩展测量范围,其前提条件为:
1)闭环光纤陀螺的初始工作状态必须处于第一级干涉条纹之内,即陀螺必须在0≤|Ω|<Ωπ的输入角速率范围内启动并成功闭环;
2)闭环后能够稳定工作在第一级干涉条纹之内,即允许的最大平均角加速度不能大于ω˙max=2πBΩπ/5,其中B为陀螺带宽[3]。
否则,陀螺可能跳到其他的干涉条纹,出现以2π为周期的非单调响应[3]。
3 试验验证
根据2.2所述量程扩展方法,完成了某型光纤陀螺仪调制解调软件的研制并进行了相关验证试验,试验结果为:
1)当输入角速度绝对值小于989(°)/s时,任意时刻上电启动,陀螺均能正确测量输入角速度;当陀螺稳定工作后,输入角速度在±2500(°)/s之内(转台限制)任意选择,陀螺同样能正确测量输入角速度;
2)先使陀螺处于输入角速度绝对值大于989(°)/s的状态,再上电启动,陀螺无法正确测量输入角速度。
4 结论
本文从闭环光纤陀螺工作原理出发,分别对跨条纹调制和单级干涉条纹扩展两种扩展闭环光纤陀螺量程的方法进行了分析。试验结果较好地验证了基于单级干涉条纹的量程扩展方法的理论正确性,同时也说明在实际应用中,必须保证陀螺在上电时输入角速度小于单条纹测量范围,以便陀螺能够正常闭环,然后才能实现更大角速度的测量。
跨条纹调制法需要复杂的解调算法或增加光路复杂程度,不易实现,而基于单级干涉条纹的量程扩展方法在工程上更加简单易行,仅需对软件进行修改,硬件无需改动,具有一定的工程应用价值。对于实际应用时,必须限制启动输入角速度的问题,需要进一步的研究。
[1]张维叙.光纤陀螺及其应用[M].国防工业出版社,2008.5.
[2]张桂才.光纤陀螺原理与技术[M].国防工业出版社,2008.12.
[3]王巍.干涉型光纤陀螺仪技术[M].中国宇航出版社,2010.10.