基于新息检验的分布式雷达网虚假航迹鉴别
2015-06-19吴健平王国宏孙殿星关成斌
吴健平,王国宏,孙殿星,关成斌
(海军航空工程学院信息融合技术研究所,山东烟台264001)
基于新息检验的分布式雷达网虚假航迹鉴别
吴健平,王国宏,孙殿星,关成斌
(海军航空工程学院信息融合技术研究所,山东烟台264001)
针对电子战飞机(electronic combat air vehicle,ECAV)编队对分布式雷达网的航迹欺骗干扰,提出了一种基于新息检验的分布式雷达网虚假航迹鉴别方法。首先,分析了ECAV引入的虚假目标位置误差,研究了其对雷达量测所造成的影响。在此基础上,采用Kalman滤波对虚假航迹进行跟踪,并在跟踪的过程中提取归一化新息平方,利用统计假设检验实现单部雷达对航迹真实性的判决,采用m/n逻辑加强判决结果的可靠性,突出了雷达网在信息融合方面的优势。仿真结果表明,该方法能够实现对虚假航迹的准确鉴别。
雷达网;航迹欺骗;新息检验;m/n逻辑
0 引 言
随着现代战争中电子对抗手段的广泛应用,传感器系统所面临的战场电磁环境日益复杂。雷达作为战场指挥的“千里眼”,提高其系统反隐身、抗干扰能力,对于提高武器系统的整体作战效能以及战场装备的生存周期具有十分重要的意义[12]。目前,各国军事专家已公认,雷达组网是对抗体系电子干扰最切实可行的手段[35]。通过雷达组网,各传感器之间能够实现多站资源融合共享,充分发挥体系对抗的集成优势。但是近年来,针对雷达网实施的干扰样式不断推陈出新,其中,航迹欺骗干扰[6]就是一种新颖的多对多雷达网电子干扰手段。在敌方实施航迹欺骗的过程中,多架装备有电子对抗措施(electronic countermeasures, ECM)的隐身电子战飞机(electronic combat air vehicle,ECAV)通过截获各雷达发射的电磁脉冲,采用时间延迟技术产生距离假目标,并且根据事先侦察获知的雷达位置信息,使得各自转发的距离虚假目标在各雷达的时空上都能巧妙重合,从而实现对整个网的欺骗。
目前,有关航迹欺骗干扰的研究大多集中在对ECAV飞行轨迹的优化控制[7-14]。其中,文献[7- 8]分析了ECAV编队对雷达网实施航迹欺骗干扰的可行性,总结了有关航迹欺骗的基本概念;在此基础上,文献[9]研究了飞行控制过程中ECAV的可飞行空域;文献[10- 14]解决了二维空间和三维空间中动力约束条件下ECAV的轨迹规划难题;针对ECAV需要对雷达网进行侦察定位,文献[15]提出了一种高精度的定位算法。相比而言,在雷达网抗航迹欺骗干扰方面,很少有文献进行相关报道[16]。本文通过分析虚假航迹在空间分布上的基本特性,将ECAV引入的虚假点位置误差视为附加的雷达量测误差,在滤波的过程中构造归一化的信息平方作为检验统计量,采用统计假设检验实现了对虚假航迹的鉴别。采用m/n逻辑对判决结果进行了加强,突出了雷达网的信息融合优势。
1 问题描述
理想的航迹欺骗场景如图1所示。假设雷达网由R1、R2、R33部两坐标雷达组成。具有隐身性能的ECAV成功躲避了雷达网的探测与跟踪,并且一对一地利用自身携带的电子战装备截获各部雷达发射的电磁脉冲,对截获信号在时间上进行延迟,之后按原路转发回雷达,完成各自对单部雷达的距离欺骗。在此基础上,ECAV通过相互之间的协同控制,使得各自转发的距离虚假目标在时间和空域上巧妙重合,如图1中P1、P2所示。经时间序列上的推移,最终形成了一条虚假航迹。

图1 虚假航迹产生原理
从上述分析可知,在航迹欺骗过程中,ECAV的航路规划十分复杂,相关学者对此也做了大量的研究[7-14]。首先,ECAV编队需要对雷达网实施全面的侦查定位,获取各部雷达的位置坐标、工作参数等相关信息;其次,各ECAV的位置必须限制在各自所对应的雷达站到虚假目标点之间的方向线上;再者,每架ECAV都需要安装高精度的信号截获转发设备;最后,在满足上述要求的同时,各ECAV还必须考虑自身的气动性能。复杂的协同控制过程使得ECAV不可避免地会引入各种控制误差,这些误差使得同一时刻经由3架ECAV转发产生的距离虚假目标在空间上不再重合,但是依然被认定为是同一目标,如图2所示。各雷达分别对P11、P12、P13进行“量测”,量测结果所体现出来的总误差要大于雷达自身探测精度所决定的误差,导致跟踪过程中归一化的新息平方大于真实值。
2 基于新息检验的虚假航迹鉴别
2.1 系统模型及误差分析
为了简化问题,首先针对雷达1(针对雷达2和雷达3的分析方法完全相同)进行分析。假设由雷达1自身探测精度所决定的量测误差为W11,对于两坐标雷达,此处有W11=[Δρ11,Δθ11]T,其协方差矩阵为

式中,Δρ11、Δθ11分别表示该雷达的距离和方位角量测误差,它们服从均值为零的高斯分布,方差分别为和1。同时,假设由雷达1所对应的ECAV1引入的误差为W12,在同一坐标系中,W12=[Δρ12,Δθ12]T,其协方差矩阵为

式中,Δρ12、Δθ12分别表示由ECAV1引入的附加在雷达距离和方位角量测上的误差;它们也服从均值为零的高斯分布,方差分别为σρ212和σθ212。由于两种误差是由敌我双方各自所引起的,二者之间不存在任何相关性,因此,总的误差可以表示为二者之和

即在虚假航迹情况下,雷达1对虚假航迹进行跟踪时的系统模型为


图2 ECAV转发的虚假点
需要注意的是,此处我们将ECAV1引入的雷达量测误差W12考虑进了系统的量测方程,但是在滤波递推的过程中新息协方差阵S(k+1)却并未包含R12(k+1),下面做具体分析。
对于雷达1,状态的一步预测为

预测值的误差为

量测预测为

在滤波的过程中,定义量测的预测值和量测值之间的差值为新息

将式(5)和式(8)代入式(9),得到

此时,对应的新息协方差为

在实际滤波流程中,新息v1(k+1)由式(9)直接求得,但是新息协方差却不包含R12(k+1)项,表示为

即,v1(k+1)与S1(k+1)不匹配。事实上,S1(k+1)所对应的“新息”表达式为

由上述分析可知,若雷达1所处理的航迹是一条真实目标的航迹,则W12(k+1)=0,从而v1(k+1)=v′1(k+1);若航迹是由ECAV通过协同控制产生的,则W12(k+1)≠0,从而v1(k+1)>v′1(k+1)。需要说明的是,此处的“>”号仅仅表示统计意义上的大小关系。
2.2 归一化新息平方检验
借鉴机动目标跟踪的思想,本文构造了归一化的新息平方,即

从上述分析可知,对于真实目标

式中,ε′1(k)是具有nZ个自由度的χ2分布随机变量,nZ为量测的维数。根据数理统计的相关知识可知,ε′1(k)的方差为

对于虚假航迹

相应的有D[ε1(k)]≠2nz。
因此,如果能够将滤波过程中归一化新息平方ε1(k)作为样本,并且对其方差进行检验,那么就能够实现对虚假航迹的鉴别。两个假设如下:
(1)H0:D[ε1(k)]=2nz⇒航迹为真实航迹;
(2)H1:D[ε1(k)]≠2nz⇒航迹为真实航迹。
根据统计假设检验的基本步骤,首先,选取合适的检验统计量,并且明确其概率分布。本文构造χ2检验统计量

当χ2≤(N-1)时,接受H0,判定航迹为真实航迹;当χ2>(N-1)时,接受H1,判定航迹为虚假航迹。
对于整个雷达网,首先假设在融合中心由各雷达提供的虚假航迹已经成功关联。在上述统计检验的基础上,为了提高算法可靠性,采取m/n逻辑对判决结果进行加强。对于本文由3部两坐标雷达组成的雷达网,取m/n=2/3。即,在一次蒙特卡罗仿真过程中,如果有两部或者两部以上的雷达同时认为受检验的航迹为虚假航迹,则总体判决H1成立;否则,判决H0成立。整个算法的流程如图3所示,具体步骤如下:
步骤1 对各雷达的量测数据进行分布式Kalman滤波;
步骤2 提取滤波过程中的新息与新息协方差;
步骤3 求解归一化的新息平方εi(k);
步骤4 根据实际情况确定样本容量,构造χ2检验统计量;
步骤5 确定显著性水平α以及对应的置信门限,进行单雷达的χ2检验;
步骤6 对整个雷达网进行2/3逻辑检验;
步骤7 完成系统总体判决。

图3 虚假航迹鉴别系统框图
3 仿真分析
3.1 仿真初始条件
仿真以3部两坐标雷达组成的雷达网为例进行分析,假设以雷达1为坐标原点建立直角坐标系,雷达2位于(50 000 m,0 m),雷达3位于(120 000 m,0 m),3部雷达的采样周期均为1 s;设拟生成的虚假目标的航迹起始位置为(30 000 m,100 000 m),其X轴和Y轴方向的速度分别为380 m/s和-200 m/s。雷达网对其进行跟踪200 s,检验显著性水平α=0.05。
3.2 仿真实验一
设3部雷达的测距误差标准差均为100 m,测角误差标准差均为0.1°;设由3架ECAV所引入的虚假目标位置误差标准差均为95 m,方位角误差标准差均为0.085°。在上述条件下,进行300次蒙特卡罗仿真,得到雷达1(以雷达1为例,其他两部雷达的跟踪效果与雷达1相当)对虚假目标的跟踪情况,如图4所示。

图4 雷达1跟踪情况图
采用本文提出的方法对航迹的真假进行鉴别,其中,样本容量均取为N=25,样本起始时刻均为N_start=30 s,得到单部雷达对虚假航迹的正确鉴别率分别为88%、89%和91%,整个雷达网对虚假航迹的正确鉴别率为96.3%。
3.3 仿真实验二
仿真初始条件不变,其他参数设置与实验一相同,改变雷达1的距离量测误差标准差,使其从100 m均匀地增大到300 m,得到雷达1的距离量测误差对其自身以及雷达网的虚假航迹正确鉴别率的影响,仿真结果如图5和图6所示。

图5 雷达1距离量测误差对其自身虚假航迹正确鉴别率的影响

图6 雷达1距离量测误差对雷达网虚假航迹正确鉴别率的影响
与前文类似,改变雷达1的角度量测误差标准差,使其从0.1°增大到0.3°,得到雷达1的方位角量测误差对其自身以及雷达网的虚假航迹正确鉴别率的影响,仿真结果如图7和图8所示。

图7 雷达1角度量测误差对其自身虚假航迹正确鉴别率的影响

图8 雷达1角度量测误差标准差对雷达网虚假航迹正确鉴别率的影响
从图5和图7可以看出,随着雷达1距离量测精度和方位角量测精度的下降,其自身的虚假航迹正确鉴别率呈明显下降趋势,这是由于雷达1量测误差的增大会使其对应的无人机引入的虚假点位置误差相对减小,从而导致虚假航迹与真实航迹在量测误差上的差异性减小,使虚假航迹的鉴别难度加大,因此正确鉴别率降低。
受雷达1的影响,整个雷达网的虚假航迹正确鉴别率也有小幅下降,如图6和图8所示。雷达网的正确鉴别率之所以没有随雷达1大幅下降,是因为在总体判决中2/3逻辑综合了整个网的探测精度,一部雷达探测精度的下降不足以影响全局虚假航迹的正确鉴别。
3.4 仿真实验三
仿真初始条件不变,其他参数设置与实验一相同,改变ECAV1引入的雷达1距离量测误差,使其从60 m均匀地增大到260 m,得到ECAV1引入的距离量测误差对雷达1以及整个雷达网的虚假航迹正确鉴别率的影响,仿真结果如图9和图10所示。
与前文类似,改变ECAV1引入的雷达1角度量测误差标准差,使其从0.05°均匀地增大到0.15°,得到ECAV1引入的方位角量测误差对雷达1以及整个雷达网的虚假航迹正确鉴别率的影响,仿真结果如图11和图12所示。
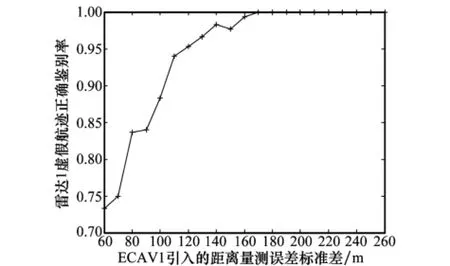
图9 ECAV1引入的距离量测误差对雷达1虚假航迹正确鉴别率的影响
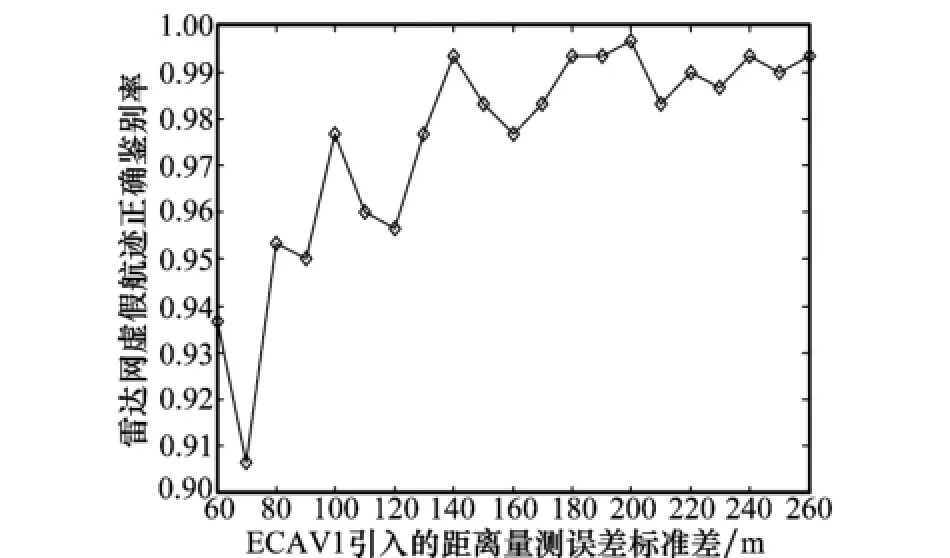
图10 ECAV1引入的距离量测误差对雷达网虚假航迹正确鉴别率的影响

图11 ECAV1引入的角度量测误差对雷达1虚假航迹正确鉴别率的影响
从图9和图11可以看出,随着ECAV1引入的雷达量测误差逐渐增大,雷达1对虚假航迹的正确鉴别率呈明显上升趋势。不难理解,ECAV引入的虚假目标位置误差越大虚假航迹的逼真性就越差,因此,虚假航迹也就越容易被鉴别。
受雷达1对虚假航迹正确鉴别率逐渐提高的影响,整个雷达网对虚假航迹的鉴别情况也进一步得到了改善,如图10和图12所示。

图12 ECAV1引入的角度量测误差对雷达网虚假航迹正确鉴别率的影响
3.5 仿真实验四
仿真初始条件不变,其他参数设置与实验一相同,改变样本容量的大小,仿真结果如表1所示。从表1中可以得出,随着样本容量逐渐增大,虚假航迹正确鉴别率不断提高,这是由于样本反应了航迹的基本信息,样本越大其包含的信息就越全面,越能够反应总体的统计特征,在此基础上,雷达就可以更准确地鉴别航迹的真伪。

__表1 样本容量对虚假航迹正确鉴别率的影响%
3.6 仿真结果分析
通过以上的仿真实验可知,本文的方法能够实现对虚假航迹的准确鉴别,同时,正确鉴别率与雷达的量测精度、ECAV引入的虚假点位置误差以及样本容量大小密切相关。为了提高正确鉴别率,需要注意以下两点:一是尽可能地提高组网雷达的量测精度;二是要在兼顾计算速度的同时适当选取样本大小。
4 结 论
本文以ECAV对雷达网实施航迹欺骗为背景,从虚假航迹形成的基本原理出发,分析了虚假航迹在空间上的离散性,提出了一种在滤波过程中实现雷达网抗航迹欺骗干扰的新方法;进行了仿真实验,实验结果表明,该方法计算强度小,对虚假航迹的正确鉴别率较高,对实际工程应用具有一定的理论指导意义。
[1]Li F Y,Xu J,Zhang X D.Pulse jamming suppression for airborne radar based on joint time-frequency analysis[C]∥Proc. of the IET Radar Conference,2013:1- 4.
[2]Zhang X X,Liu Y J,Wang G H.Technology and application of EW—radar countermeasure[M].Beijing:Publishing House of Electronics Industry,2005:7- 13.(张锡祥,刘永坚,王国宏.电子战技术与应用—雷达对抗篇[M].北京:电子工业出版社,2005:7- 13.)
[3]Chen Y G,Li X H,Sheng Y.Analysis and evaluation of combat capability for radar network[M].Beijing:National Defense Industry Press,2006:1- 9.(陈永光,李修和,沈阳.组网雷达作战能力分析与评估[M].北京:国防工业出版社,2006:1- 9.)
[4]Li S Z,Wang G H,Bai J.Performance analysis of target tracking for radar network in the presence of stand off jamming[C]∥Proc.of the International Conference on Cybernetics and Informatics,2014:1217- 1226.
[5]Zhu L J,Dong Y C,Jiang T Y,et al.Radar net anti-jamming capacity evaluation based on projection pursuit method[J].Advanced Materials Research,2014,912:1318- 1321.
[6]Pachter M,Chandler P R,Larson R A.Concepts for generating coherent radar phantom tracks using cooperating vehicles[C]∥Proc.of the AIAA Guidance,Navigation,and Control Conference and Exhibit,2004:1- 14.
[7]Purvis K B,Chandler P R,Pachter M.Feasible flight paths for cooperative generation of a phantom radar track[J].Journal of Guidance,Control,and Dynamics,2006,29(3):653- 661.
[8]Maithripala D H,Mears M J,Jayasuriya S.Phantom track generation through cooperative control of multiple ECAVs based on feasibility analysis[J].Journal of Dynamic Systems,Measurement,and Control,2007,129(5):708- 715.
[9]Hajieghrary H,Jayasuriya S.Guaranteed consensus in radar deception with a phantom track[C]∥Proc.of the ASME Dynamic Systems and Control Conference.American Society of Mechanical Engineers,2013:1- 7.
[10]Xu Y,Basset G.Virtual motion camouflage based phantom track generation through cooperative electronic combat air vehicles[J].Automatic,2010,46(9):1454- 1461.
[11]Dhananjay N,Kuduvalli A,Ghose D.Realistic coherent phantom track generation by a group of electronic combat aerial vehicles[C]∥Proc.of the American Control Conference,2013:4642- 4647.
[12]Lee I H,Bang H.A cooperative line-of-sight guidance law for a three-dimensional phantom track generation using unmanned aerial vehicles[J].Proceedings of the Institution of Mechanical Engineers,Part G:Journal of Aerospace Engineering,2013,227(6):897- 915.
[13]Gao B,Mao S Y,Sun J P.Cooperative generation of phantom radar track using a team of ECAVS based on RGPO[J].Journal of Beijing University of Aeronautics and Astronautics,2011,37(11):1343- 1346.(高斌,毛士艺,孙进平.基于RGPO的编队ECAVs协同航迹欺骗[J].北京航空航天大学学报,2011,37(11):1343- 1346.)
[14]Xu Y,Basset G.Real-time optimal coherent phantom track generation via the virtual motion camouflage approach[J].Journal of Dynamic Systems,Measurement,and Control,2011,133(5):1- 10.
[15]Purvis K B,Astrom K J,Khammash M.Estimation and optimal configurations for localization using cooperative UAVs[J].IEEE Trans.on Control Systems Technology,2008,16(5):947- 958.
[16]Rao B,Xiao S,Wang X S,et al.Maximum likelihood approach to the estimation and discrimination of exoatmospheric active phantom tracks using motion features[J].IEEE Trans.on Aerospace and Electronic Systems,2012,48(1):794- 819.
Phantom track discrimination based on inspection of innovation in distributed radar network
WU Jian-ping,WANG Guo-hong,SUN Dian-xing,GUAN Cheng-bin
(Institute of Information Fusion Technology,Naval Aeronautical and Astronautical University,Yantai 264001,China)
Aiming at phantom track deception released by electronic combat air vehicles(ECAVs)formation for distributed radar network,a discrimination method is proposed,which is based on the inspection of innovation.Firstly,the position error of the phantom target introduced by ECAV is explored with its influence for the radar measurement.And in this basis,the phantom track is filtered using the Kalman algorithm.The normalized innovation square is constructed during the filtering and the statistical testing is used to utilize the discrimination work for single radar.M/n logic is carried out to enhance the reliability of the judgement,and it also reflects the advantage of the radar network.Simulation results show that phantom track can be discriminated by using the proposed method.
radar network;phantom track deception;innovation inspection;m/n logic
TN 953
A
10.3969/j.issn.1001-506X.2015.01.12
吴健平(1989-),男,博士研究生,主要研究方向为信息融合、雷达组网。
E-mail:860343510@qq.com
王国宏(1963-),男,教授,博士研究生导师,博士,主要研究方向为信息融合、雷达组网、目标跟踪。
E-mail:wangguohong@vip.sina.com
孙殿星(1983-),男,博士研究生,主要研究方向为信息融合、雷达组网。
E-mail:Sdxdd.hi@163.com
1001-506X(2015)01-0067-06
网址:www.sys-ele.com
2014- 04- 28;
2014- 05- 21;网络优先出版日期:2014- 06- 12。
网络优先出版地址:http://w ww.cnki.net/kcms/detail/11.2422.TN.20140612.1506.023.html
国家自然科学基金(61002006,61102167);“泰山学者”建设工程专项经费资助课题
