航天器非线性鲁棒自适应姿态机动控制律
2015-06-19王卫杰李怡勇
王卫杰,任 元,李怡勇,罗 元
(1.装备学院航天装备系,北京101416;2.装备学院航天指挥系,北京101416;3.装备学院训练部,北京101416)
航天器非线性鲁棒自适应姿态机动控制律
王卫杰1,任 元1,李怡勇2,罗 元3
(1.装备学院航天装备系,北京101416;2.装备学院航天指挥系,北京101416;3.装备学院训练部,北京101416)
针对存在未知转动惯量和外部干扰力矩的敏捷航天器快速大角度姿态机动问题,结合非线性反步法和Lyapunovo稳定性分析方法设计控制力矩和转动惯量估计值的非线性鲁棒自适应控制律。在控制力矩控制律中,加入非线性阻尼项对外部干扰力矩进行补偿,证明了系统的全局一致最终有界稳定性。引入非线性动系数增加系统的动态性能,提高了姿态快速机动后的快速稳定能力。在Maltlab/Simulink环境下进行航天器姿态机动控制仿真研究,仿真结果验证了所设计控制器的有效性和可行性。
航天器;Lyapunovo稳定性;姿态机动;非线性反步法;鲁棒自适应控制
0 引 言
敏捷航天器三轴姿态控制通常采用动量交换装置作为执行机构,如反作用飞轮和控制力矩陀螺,而动量装置的转动会导致航天器转动惯量的不确定性。同时,航天器在轨运行不可避免地受到各种干扰力矩的影响,如重力梯度力矩、太阳辐射力矩、气动力矩以及地磁力矩,一般的干扰力矩通常都是不确定的,无法进行精确估算。航天器姿态控制系统的设计必须考虑包括转动惯量和干扰力矩等不确定性因素以提高姿控系统的性能指标。由于航天器在大角度姿态机动时,姿态运动及动力学方程组是一组多变量、强耦合的非线性方程,因此三轴航天器机动控制律的设计本质上是一个复杂的非线性控制问题[1]。
反步法作为一种非线性控制的有效方法[2],多名学者将其和其他控制方法相结合,开发出多种用于飞行器姿态控制的算法。文献[3]结合反步法和模糊逻辑分析了航天器的自适应容错姿态控制问题;文献[4]基于模糊自适应反步法研究了存在变参数和外部干扰的飞艇平台控制问题;文献[5]针对刚体航天器的姿态控制问题,基于反步法提出了一种自适应滑模控制策略;文献[6]基于自适应反步滑模控制方案设计了挠性航天器的姿态容错控制器;文献[7]基于反步法研究了航天器编队飞行的协同控制问题;文献[8]结合抗饱和技术和反步法,设计了一种鲁棒自适应集成控制方案。
对于存在外部干扰力矩和转动惯量不确定性的航天器姿态控制问题,文献[9]提出了一种自适应反步控制算法,文献[10]将自适应反步法与非线性阻尼算法结合起来,设计了一种鲁棒自适应控制器,但他们均未考虑陀螺耦合力矩的影响。文献[11]给出了一类基于反步法的鲁棒自适应控制器。文献[9- 11]均考虑了控制器的自适应性,但选取的都是线性反步跟踪函数。文献[12]和文献[13]分别设计了一种非线性反步控制律,但均未考虑系统的自适应性。上述研究还有一个共性的不足就是控制律系数均为常数,未考虑航天器姿态机动对控制器动态性能的需求。文献[14]设计了参数分段的自适应控制器以增加系统的动态性,但未考虑外部干扰的影响。
针对上述研究存在的不足,本文以带动量装置的航天器姿态机动控制系统为研究对象,采用由无奇异的四元数描述的航天器姿态机动数学模型,选取非线性反步跟踪函数设计控制力矩和未知转动惯量估计值的鲁棒自适应控制律。在控制力矩控制律中,加入非线性阻尼项对外部干扰力矩进行补偿,并引入非线性动系数增加系统的动态性能,提高了姿态快速机动后的快速稳定能力,并基于Lyapunovo函数进行系统的稳定性分析。理论分析和仿真结果表明,所设计的非线性鲁棒自适应控制律能够快速光滑地降低控制力矩峰值,实现了对未知转动惯量的估计,抑制了外部干扰力矩,增强了系统的动态性,保证了系统的全局一致最终有界稳定。
1 航天器姿态描述
航天器三轴姿态控制的主要方式为角动量交换方式,带动量装置(如反作用飞轮或控制力矩陀螺)的刚体航天器姿态动力学方程的一般形式为

式中,u表示动量装置对航天器的控制力矩矢量。h为动量装置转动部件相对星体的角动量;外部干扰力矩d未知但有界,且满足

式中,‖d‖2为d的2-范数;d0为未知正常数。J为航天器未知正定对称的转动惯量矩阵

ω为航天器本体坐标系Fb相对于惯性坐标系Fi的角速度在本体系下的分量,ω×表示斜对称矩阵

为了避免大角度机动,用欧拉角描述引起的奇异问题,引入四元数描述航天器姿态

式中,I3为3×3的单位矩阵;ω=[ω1ω2ω3]T表示本体系相对于地心惯性系的旋转角速度在本体系中的分量;q={q0qv}∈R×R3(Rn为n维欧氏空间)表示航天器本体系相对于惯性系的实际四元素,q满足正交约束方程q20+qvTqv=1,其中qv=[q1q2q3]T,qv×表示qv的斜对称矩阵。
将航天器绕其惯量主轴旋转的欧拉角分别记为:滚转角φ、俯仰角θ、偏航角。由于敏捷航天器机动时间很短,可以忽略轨道角速度的影响,则四元素q与欧拉角之间的转换关系为

在航天器姿态机动任务中,期望坐标系与地心惯性坐标系成固定的夹角,该夹角可由指令四元素qc={qc0qcv}∈R×R3表示,指令四元素同样也满足约束q2c0+qTcvqcv=1。
姿态机动的误差四元素qe={qe0qev}∈R×R3表示实际四元素q与指令四元素qc之差,三者这间的关系可描述为

式中,⊗代表四元素乘法。
误差四元素可表示为

对式(9)求导可得

2 非线性鲁棒自适应控制律设计
由式(5)运动学描述,考虑选取Lyapunov函数使子系统稳定


对式(12)求导,有

为了满足Lyapunov稳定性,使˙V1≤0,进行设计。
对于运动学方程式(10),将ω看作虚拟控制输入,设计镇定函数ωr稳定运动学系统式(10)。
定义新的变量

设计非线性跟踪函数[15]为

式中,α、β是正常数。
将式(14)和式(15)带入式(13),可得

将式(16)带入式(17),得

则当x1≠0,x2=0时,结合反正切函数的性质,得

因此V1渐进稳定。
对式(15)求导,可得


定义新变量

将式(20)两边左乘J后,再将式(1)和式(22)带入,得

令

则式(23)可写为

式中,η为未知常数,表示航天器转动惯量的真实值

Y的表达式为

定义航天器转动惯量参数的估计误差


对式(11)进行增广,得到系统的Lyapunov函数式中,G为转动惯量估计参数矩阵,对式(30)求导,得


由式(28)可知η=η¯+η~,将η和式(25)、式(29)带入式(31),得

易知

将式(18)、式(33)带入式(32),可得

为了保证系统的稳定性,选取自适应控制律


式中,k1、k2均为正常数,其中非线性阻尼项k2x2用于补偿外部干扰的不确定性。
将式(35)和式(36)带入式(34),得

为了分析系统的稳定性,介绍以下引理。
引理[16]若正定函数V(t)满足

式中,λ为正常数;φ(t)>0,∀t>0。若φ(t)=C为常数,则系统是全局一致最终有界稳定的。
结合引理,可以证明系统V的稳定性,具体证明如下。
证明 根据不等式的性质有

将式(2)带入式(39),改写为

将式(40)带入式(37),得

由式(30)可得

式中,χJ为矩阵J的最大特征值,对于航天器而言,均有
由式(42)可得

将式(43)带入式(41),有

对比式(38),显然式(44)符合引理条件,故系统V是全局一致最终有界稳定的。证毕
航天器姿态在进行大角度快速机动初始阶段,姿态角偏差较大,如果控制律式(36)中的系数k1、k2也较大,就会造成指令力矩超过执行机构实际输出力矩能力。在姿态机动的末尾阶段,姿态角偏差较小,需要姿态快速稳定控制,为了缩短姿态稳定阶段的时间,可以适当增大系数。为了增加系统的动态性能,可以根据姿态角误差的大小对系数进行动态调整,以达到更好的快速机动和快速稳定的效果。
本文基于双曲正弦函数构造以下非线性作用函数:

式(45)对应的图像如图1所示。可以看出,当s→0时,f(s)→1。

图1 双曲正弦函数示意图
将s记为以角度表示的姿态角误差,利用式(45)构造控制律u的非线性动系数表示为
将式(46)和式(47)带入式(36),控制律u可修改为

结合式(46)~式(48)可以看出,在姿态趋于稳定时,控制律u的系数将增加一倍,从而使系统快速稳定。
3 仿真分析
为了验证本文设计的非线性鲁棒自适应控制律的有效性和可行性,在Matlab/Simulink环境下,按照以下参数[9,13]进行仿真研究。
航天器初始姿态角为

航天器初始角速度为

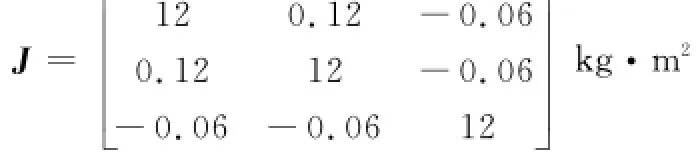
航天器转动惯量为
航天器惯量矩阵的估计参数矩阵为

指令四元素为

控制参数设置为

航天器的干扰力矩为

其中,t为时间,单位为s。
采用式(35)和式(36)的非线性鲁棒自适应控制器进行仿真,仿真结果如图2~图7所示。图2是控制力矩u的时间历程,图3是姿态角速度的时间响应,图4是跟踪误差x2的时间响应,图5是航天器转动惯量参数估计值的时间响应,图6是由式(46)得到的控制律动系数z1的响应情况。可以看出,在姿态接近稳定时,控制律系数光滑地增大了一倍,实现了系统的快速稳定,并且由于动系数是姿态角误差的函数,所以根据三轴误差分量的实际值,自动调节系数的大小,误差分量的不同导致三轴系数的差异,这与传统的定系数有着本质的区别。图7是式(36)陀螺耦合力矩项(ω×h)的时间响应,对比图2的控制力矩,耦合力矩不到控制力矩u的2%。
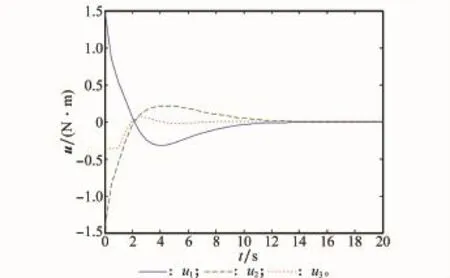
图2 控制力矩的时间历程

图3 姿态角速度的时间响应

图4 跟踪误差x2的时间响应
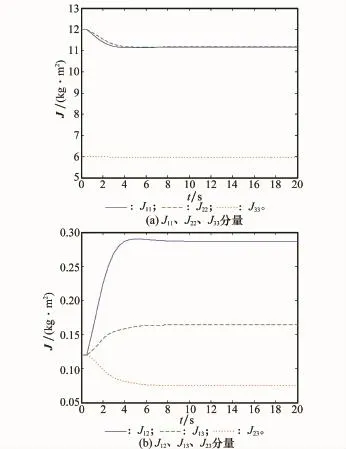
图5 转动惯量估计值的时间响应

图6 动系数z1的响应

图7 陀螺耦合力矩的时间响应
从仿真结果来看,所设计的非线性鲁棒自适应控制律快速光滑地降低了控制力矩峰值,实现了对未知航天器转动惯量的估计,增强了控制律的动态性能。保证了航天器快速大角度姿态机动时系统的稳定性。
4 结 论
本文设计了一种非线性鲁棒自适应控制律。针对带动量装置的航天器姿态控制系统,采用由无奇异的四元数描述的航天器姿态机动数学模型,选取非线性反步跟踪函数设计控制力矩和未知转动惯量估计值的鲁棒自适应控制律。在控制力矩控制律中,加入非线性阻尼项对外部干扰力矩进行补偿,证明了系统的全局一致最终有界稳定性,并引入非线性动系数增加系统的动态性能,提高了姿态快速机动后的快速稳定能力,考虑了陀螺耦合力矩对控制力矩的影响。基于Matlab/Simulink平台进行仿真研究,结果表明,本文所设计的非线性鲁棒自适应控制律能够快速光滑地降低控制力矩峰值,实现了对未知转动惯量的估计,抑制了外部干扰力矩,增强了系统的动态性,验证了该控制律的有效性和可行性。
[1]Yang B H.Spacecraft guidance,navigation&control[M].Beijing:China Science and Technology Press,2010:96- 97.(杨保华.航天器制导、导航与控制[M].北京:中国科学技术出版社,2010:96- 97.)
[2]Khalil H K.Nonlinear system[M].3rd ed.New Jersey:Prentice Hall,2002.
[3]Zou A M,Kumar K D.Adaptive fuzzy fault-tolerant attitude control of spacecraft[J].Control Engineering Practice,2011,19(1):10- 21.
[4]Yang Y N,Wu J,Zheng W.Station-keeping control for a stratospheric airship platform via fuzzy adaptive backstepping approach[J].Advances in Space Research,2013,51(7):1157- 1167.
[5]Cong B L,Liu X D,Chen Z.Backstepping based adaptive sliding mode control for spacecraft attitude maneuvers[J].Aerospace Science and Technology,2013,30(1):1- 7.
[6]Jiang Y,Hu Q L,Ma G F.Adaptive backstepping fault-tolerant control for flexible spacecraft with unknown bounded disturbances and actuator failures[J].ISA Transactions,2010,49(1):57- 69.
[7]LüY Y,Hu Q L,Ma G F,et al.6 DOF synchronized control for spacecraft formation flying with input constraint and parameter uncertainties[J].ISA Transactions,2011,50(4):573- 580.
[8]Zhang F,Duan G R.Robust adaptive integrated translation and rotation control of a rigid spacecraft with control saturation and actuator misalignment[J].Acta Astronautica,2013,86:167- 187.
[9]Hu Q L,Li B,Huo X,et al.Spacecraft attitude tracking control under actuator magnitude deviation and misalignment[J].Aerospace Science and Technology,2013,28(1):266- 280.
[10]Song B,Li C J,Ma G F.Robust adaptive controller design for spacecraft during attitude maneuver[J].Journal of Astronautics,2008,29(1):121- 125.(宋斌,李传江,马广富.航天器姿态机动的鲁棒自适应控制器设计[J].宇航学报,2008,29(1):121- 125.)
[11]Li B,Hu Q L,Shi Z,et al.Backstepping and dynamic controlallocation for attitude maneuver of spacecraft with redundant reaction fly-wheels[J].Control Theory&Application,2012, 29(11):1419- 1425.(李波,胡庆雷,石忠,等.基于反步法与动态控制分配的航天器姿态机动控制[J].控制理论与应用,2012,29(11):1419- 1425.)
[12]Ali I,Kim J,Radice G.Large angle reorientation manoeuvre of spacecraft using robust backstepping[C]∥Proc.of the 59th International Astronautical Congress,2008.
[13]He Y.Research on attitude maneuvers control of SGCMG based agile small satellite[D].Harbin:Harbin Institute of Technology,2011.(何昱.基于单框控制力矩陀螺的敏捷小卫星姿态机动控制研究[D].哈尔滨:哈尔滨工业大学,2011.)
[14]Yan N.Research on the simulation and experiment of attitude control method for agile small satellite[D].Beijing:Beihang University,2011.(焉宁.敏捷机动小卫星姿态控制方法的仿真与实验研究[D].北京:北京航空航天大学,2011.)
[15]Kim K S,Kim Y.Robust backstepping control for slew maneuver using nonlinear tracking function[J].IEEE Trans.on Control Systems Technology,2003,11(6):822- 829.
[16]Qu Z,Dawson D,Dorsey J.A new class of robust control laws for tracking of robots[J].The International Journal of Robotics Research,1994,13(4):355- 363.
Nonlinear robust adaptive attitude maneuver control law for spacecraft
WANG Wei-jie1,REN Yuan1,LI Yi-yong2,LUO Yuan3
(1.Department of Space Equipment,Equipment Academy,Beijing 101416,China;2.Department of Space Command,Equipment Academy,Beijing 101416,China;3.Department of Training,Equipment Academy,Beijing 101416,China)
In the presence of uncertainties in the moment of inertia and the external disturbance torque,the nonlinear robust adaptive control law for the control torque and estimation of moment of inertia is designed combining the nonlinear backstepping and Lyapunovo stability.In the control law for the control torque,the nonlinear damping is added to compensate the external disturbance torque,and the globally uniformly ultimately bounded stability of the system is demonstrated.The nonlinear dynamic coefficient is introduced to increase the dynamic performance of the system,shortening the regulating time after fast attitude maneuver.By Matlab/Simulink programming,the simulation of spacecraft attitude manoeuver control is discussed,and the simulation results demonstrate the effectiveness and feasibility of the proposed controller.
spacecraft;Lyapunovo stability;attitude maneuver;nonlinear backstepping;robust adaptive control
V 448.2
A
10.3969/j.issn.1001-506X.2015.01.22
王卫杰(1983-),男,讲师,博士,主要研究方向为航天器制导、导航与控制。
E-mail:wangwjie@126.com
任 元(1982-),男,讲师,博士,主要研究方向为航天器制导、导航与控制。
E-mail:renyuan_823@aliyun.com
李怡勇(1982-),男,讲师,博士,主要研究方向为航天器制导、导航与控制。
E-mail:lyygod@163.com
罗 元(1984-),男,硕士研究生,主要研究方向为航天器制导、导航与控制。
E-mail:lolo1108@126.com
1001-506X(2015)01-0135-06
网址:www.sys-ele.com
2014- 01- 02;
2014- 03- 13;网络优先出版日期:2014- 06- 17。
网络优先出版地址:http://w ww.cnki.net/kcms/detail/11.2422.TN.20140617.1827.015.html基金项目:国家自然科学基金(51475472,61403396)资助课题
