基于单幅图像且避封闭环境的星体表面着陆区选取方法
2015-06-05魏若岩阮晓钢朱晓庆
魏若岩,阮晓钢,肖 尧,朱晓庆,3,黄 静,4
(1.北京工业大学电子信息与控制工程学院,北京100124;2.河北经贸大学信息技术学院,河北石家庄050061;3.麦吉尔大学机器人机械系统实验室,魁北克蒙特利尔H3A0C3;4.北京工业大学实验学院,北京101101)
基于单幅图像且避封闭环境的星体表面着陆区选取方法
为了避免着陆器在着陆过程中落于地势平坦的封闭环境,本文提出了一种基于单幅图像的星表着陆区选择方法。首先进行障碍检测,并且提取出图像中非障碍区的骨架,然后以骨架三线交点为圆心得到多个具有允许着陆范围的着陆圆,最后利用计分加权法从着陆圆的半径、连通性、纹理,以及着陆圆心与障碍物的集群关系四个方面得到最佳着陆圆。通过与其他方法的对比实验发现,本文方法能选择出障碍物稀少的区域,能够避免着陆器落入地势封闭的环境。
着陆区;星体表面;避障;封闭环境
魏若岩1,2,阮晓钢1,肖 尧1,朱晓庆1,3,黄 静1,4
(1.北京工业大学电子信息与控制工程学院,北京100124;2.河北经贸大学信息技术学院,河北石家庄050061;3.麦吉尔大学机器人机械系统实验室,魁北克蒙特利尔H3A0C3;4.北京工业大学实验学院,北京101101)
0 引 言
在探索外天体的过程中,具有科学研究价值的区域往往位于一些特殊地形的周围,这些地形包括陨石坑、山脊和丘陵等,并且复杂的地形会给着陆器带来风险,再加上所探索的天体距离地球较远,地面控制中心无法对着陆器进行实时控制,所以如何保证其自主选择安全的着陆区是当今深空探测中的一个重要课题。目前,关于星体表面安全软着陆区的选择方法主要有以下两种[1-3]:主动视觉和被动视觉。
主动视觉是通过安装在着陆器的无线电雷达和激光雷达进行三维地形数据的获取,并且从中得到理想的着陆区域[1,49],该方法已被应用到了2012年成功着陆火星表面的“好奇号”,在此次任务中,火星着陆器在动力下降段便开始了无线电雷达对着陆地形的获取,并且在着陆段实施避障。
被动视觉是通过相机成像的方法对着陆区的地形进行分析[1022],基于被动视觉的方法可以分为以下7个步骤[3]:
步骤1障碍检测,该步骤主要分析障碍物的分布;
步骤2地形分析,该步骤包括着陆区域的纹理分析和坡度估计等;
步骤3在当前探测器的燃料和动力约束下对到达着陆区各个位置的约束性进行分析;
步骤4在当前探测器的位置,速度和姿下对到达着陆区域各个位置的精确度进行分析;
步骤5基于以上4步的内容进行信息融合,得到整个着陆区域的着陆风险分布图;
步骤6在着陆风险分布图中搜索可能的着陆点;
步骤7选取最优的着陆点。
1 问题提出
基于被动视觉方法已有多个文献提出了自己的方案。针对被动视觉步骤1中的障碍物检测,文献[4]提出了一种陨石坑和岩石检测方法,该方法通过检测图像中的阴影区域预测陨石坑和岩石的位置以及尺寸,其中阴影区的检测是基于最大熵[5]的方法求取阴影区域的灰度阈值,再利用K均值的方法将接近阴影区域像素值的像素点进行聚类从而确定最终的阴影区域。该方法在文献中的实验均取得了良好的效果,但是此方法没有考虑针对强光照区域像素值的阈值求取,因为着陆区域中的障碍物不但会形成阴影区,也会形成强光照区,虽然文献[1]中通过阴影区域对岩石的位置进行了预测,但是考虑到地形复杂的不确定性,此方法很难对障碍物进行全面的检测。文献[6- 7]提出的障碍物(岩石)检测方法也是基于阴影区域的检测,该方法首先通过边缘检测检测出阴影区域,然后根据阴影区域的形状和光照方向对岩石的位置和形状大小进行估计,但是地形复杂的区域纹理较为复杂,对障碍物的提取会造成影响。文献[8]提出了一种基于灰度变化标准差(intensity stander deviation,ISD)的障碍物检测方法,该方法假设非障碍物区域具有高度的统一性,但是实际的着陆区域地形复杂,纹理较多,再加上图像中存在一定的噪声点使得障碍物检测的准确度下降,并且障碍物的提取需人工设定阈值,阈值的不同使得所提取到的障碍物的信息具有明显的差异。针对步骤2中的地形分析主要有纹理分析和着陆区的坡度分析,文献[9- 10]中利用ISD的纹理分析能够有效的检测出粗糙度较小的区域。针对坡度估计问题,文献[9]提出了一种基于序列图像的着陆区坡度估计方法,并且文献[10]在此基础上进行了改进,从而减少了对探测器内部的状态测量仪的依赖,但是基于序列图像的三维地形重建往往需要较多的计算量,而且该算法对误差较为敏感,所以很难实现地形的三维信息识别[1,11]。文献[2,12]提出了一种基于阴影恢复形状(shape from shade,SFS)的坡度估计方法,该方法通过地形的阴影和光照特点对地形进行三维重建并且估计着陆区域的坡度,但是应用该方法的前提是需要图像中的景物具有光滑的表面[13],大部分星体表面是粗糙的。文献[14]提出了一种基于光流法的三维地形重建方法,但是该方法要求相机距离星体表面较近,当距离较远时,三维重建的效果不明显。针对步骤6中的着陆点搜索问题文献[15]提出了一种螺旋式的安全着陆区搜索方法,该方法已经用在了2013年成功着陆在月球表面的“嫦娥3号”的粗避障阶段[16]。针对步骤7中的最优着陆点选取问题,文献[17]提出了一种基于形态学的最大着陆圆搜索方法。文献[4,8]提出了一种基于模糊规则的最佳着陆区域选取方法,该方法将各个指标分为好、中、差3个等级,但是指标等级的划分需要提前设定,这对于探索复杂的未知地形不具备灵活性。上述安全着陆点搜索方法均未考虑如何避免探测器落入地势平坦而环境封闭的特殊地形,如图1所示的白色圆圈区域,该图像中陨石坑内部的地势较为平坦,无论从图像纹理,障碍物分布以及面积大小都符合着陆器的着陆条件,但是该区域周边被陨石坑的边缘所包围,若着陆器选择该区域降落,巡视器(一种巡视车,在着陆器安全降落后释放)将无法脱离该区域,所以巡视范围将受到限制,严重的情况下将导致整个天体探测任务的失败。

图1 具有平坦地形的封闭环境(图中白色圆圈区域)
本文针对被动图像方法所涉及的问题在文献[17]的基础上提出了一种基于单幅图像且避封闭环境的星体表面安全着陆区选择方法,该方法在着陆器的粗壁障过程中进行,不涉及三维地形信息,也不涉及探测器的燃料以及状态的约束问题。该方法主要有以下两方面的创新:第一,针对被动图像方法第一步中的障碍检测所涉及的问题提出了一种双阈值的阴影区和强光照区障碍物检测算法,该算法根据图像的直方图对阴影区域阈值和强光照阈值进行自适应提取;第二,针对被动图像方法中步骤6和步骤7中的避封闭区域问题提出了一套新的方案,首先通过寻找非障碍物区域的骨架三线交点确定可能的着陆圆心,并且通过提出的外周长扩展法得到每个交点的最大着陆圆半径。然后通过着陆圆半径的大小,连通性,纹理特征以及每个着陆圆心与障碍物的集群关系确定最佳着陆圆。
本文在实验阶段首先将提出的基于双阈值二值化的障碍物检测方法与文献[1]和文献[8]的相关方法进行对比,从对比中发现本文提出的对于对大部分星体表面图像能有效的提取出图像中的障碍物,并且该算法不需任何参数的设置。然后将本文的安全着陆区的选取方法与文献[1]和文献[17]中的相关方法进行对比,发现本文方法在避障阶段不但能选出相对平坦和障碍物稀少的区域,并且能够避免着陆器落入地势封闭的区域。
2 障碍检测
对障碍物背光与强光照区的提取完成障碍物检测。首先对文献[18]的阴影区域灰度阈值确定(determination of binary threshold,DBT)算法进行改进以适用阴影区域和强光照区域的提取,然后找出大于障碍物尺寸阈值的阴影区以及强光照区。
2.1 阴影区与亮区二值化阈值的自适应提取
在DBT算法的基础上,加入了强光照区域的提取,这里命名为阴影区和强光照区灰度阈值确定法(determination of binary threshold for shadow and strong illumination areas,DBTSSI),具体步骤如下。
步骤1计算平均灰度值:

式中,M和N分别为像素点在该图像中的行列数目;f(x,y)是位于图像坐标(x,y)的像素值。
步骤2得到图像中小于f-的像素值向量b1和不小于f-的像素值向量b2,并且对b1和b2进行升序和降序的排列:

式中,i=1,2,…,n1;j=1,2,…,n2。n1和n2分别为向量b1和b2中像素值的数量。
步骤3计算b1和b2与f-的差值向量b′1和b′2:

式中,i=1,2,…,n1,j=1,2,…,n2。
步骤4计算b′1和b′2的变化率,于是得到两组新的向量v1和v2,并且计算其平均值v-1和v-2:

式中,i=1,2,…,n1-1;j=1,2,…,n2-1。


式中,i=1,2,…,n1-1;j=1,2,…,n2-1。所以,L1和L2即为v1和v2的高变化区间长度。
步骤6计算L1和L2在v1和v2中所占的长度比例p1和p2:

步骤7在b1和b2中计算高变化区域的标准差f′1和f′2:

步骤8得到阴影阈值α1和强光照阈值α2:

图2展示了星表图像的二值化效果,从中看出利用DBTSSI算法可以很好地提取到图像中阴影区域和强光照区域。

图2 二值化效果图
2.2 障碍物尺寸阈值的设定
考虑到可能存在的噪声以及微小障碍物,需要设定一个障碍物尺寸的阈值,然后将小于该尺寸阈值的障碍物去除。尺寸阈值通常参照相机的焦距,着陆器相机距离地面的垂直距离,以及着陆器的尺寸进行设定,阈值公式可参考式(18):

式中,Tarea(pixel2)为尺寸阈值;f为光学相机的焦距,单位:m;d为着陆器相机距离地面的垂直距离,单位:km;若着陆器为一个长方体,且L和S分别为着陆器的长和宽,单位:m;t为像素点数量和米的转换关系,即一米长度有多少个像素点,单位:pixels/m;λ为着陆器的膨胀系数,即障碍物的大小尺寸不能大于λLS,单位:m2,在本文中λ符合下面的关系式:

如果着陆器相机距离地面的垂直距离d为1 km,相机焦距f为2 cm,着陆器的长宽L和S均为3 m,λ为10,并且相机中像素点的大小为54μm,即t=1 000×1 000/54=18 519,根据式(18)得到Tarea约为124,则图2(a)经过尺寸阈值筛选后得到的障碍物二值图像如图3所示。
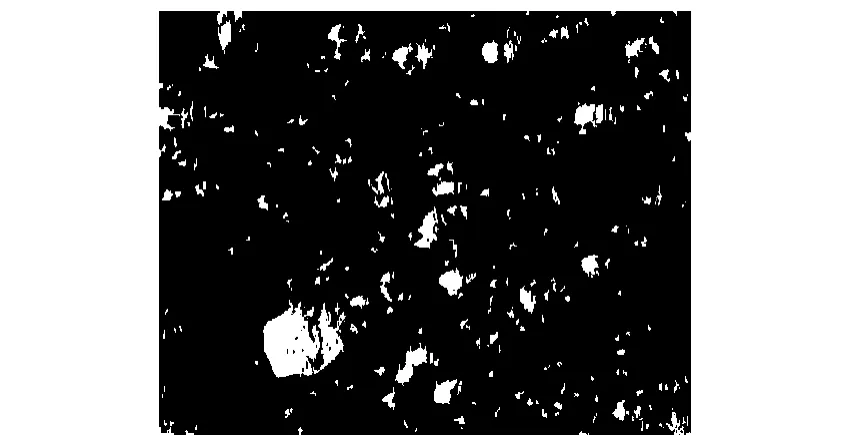
图3 经尺寸阈值筛选后得到的障碍物二值图像
3 备选着陆圆的提取
3.1 非障碍区域的骨架提取
骨架是表示平面区域结构形状的一种重要的方法,并且该方法是通过一种细化算法实现,关于骨架的算法细节可参考文献[19]。图4展示了非障碍物区域的骨架。

图4 图2(a)的非障碍物区域骨架
3.2 骨架交点的提取
若将每个障碍物看做一个质点,根据三角形的三边中垂线交点为该三角形的外接圆心的定理确定具有较大半径着陆圆的圆心一般位于骨架的三线交点处。为了提取到骨架的交点,采用卷积的形式,如果图像用函数f(x,y)表示,即图像在(x,y)的像素值为f(x,y),模板函数用δ(x,y)表示,则图像与模板的卷积表示为

式中,m和n为模板函数的尺寸。
为了提取骨架三线交点,令δ为2×2的模板,如图5(a)所示,当δ位于三线交点时,有图5(b)的4种形式,并且交点灰度值为3×256/4=192,由于两线交点的灰度值为2× 256/4=128,所以灰度阈值在[128,192]范围内。如果设定阈值为190,图6中的白色像素点为骨架三线交点。

图5 卷积模板及其三线交点的4种形式
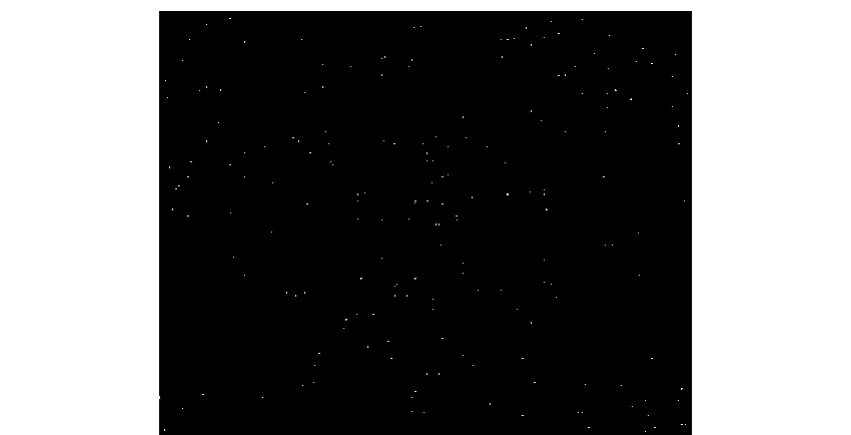
图6 提取到的骨架三线交点
3.3 基于外周长扩展的安全半径确定
本文提出了一种基于外周长扩展的最大半径搜索方法(perimeter extend,PE),该方法类似螺旋式方法[15,20-21],原理如图7所示,步骤如下。

图7 外周长扩展法示意图
步骤1确定安全着陆区所要求的最小正方体区域。假设着陆器为一个长方体,L和S分别为着陆器的长和宽,并且L≥S,考虑到一系列误差源的存在,如:导航误差、通信误差等,必须根据着陆器的尺寸设计一个可允许着陆的最小正方形区域,该区域要大于着陆器的尺寸,所以需设定一个膨胀参数,该参数能够保证实际着陆区尺寸与着陆器尺寸之间存在一个比例关系,则该最小正方形着陆区域的边长为

式中,L′为最小正方形的边长,单位:pixel;f为相机的焦距单位:m;d为相机距离行星表面的垂直距离,单位:km;t为像素点数量和米的转换关系,单位:pixels/m;λ为着陆器的膨胀系数,并且符合关系式(19)。
步骤2以骨架三线交点为圆心,每次将正方形边长向相反方向扩展L′个长度。假设O为障碍物像素点集合,P为每次扩展后的外周长像素点集合,如果P∩O=Ø,外周长继续扩展,否则停止扩展。
步骤3计算骨架三线交点到外周长的垂直距离,该距离长度即为以该交点为圆心的安全着陆圆的半径。
3.4 备选着陆圆的确定
考虑到在导航和控制过程中可能存在的误差,着陆位置要距离障碍物较远,如果着陆圆心视为着陆器的着陆点,则备选着陆圆的选择需考虑着陆圆的半径大小,所以下面介绍一种备选着陆圆的选择方法,该方法分为以下两个步骤。
步骤1对所有圆按照半径的大小进行升序排列,并且选出M个着陆圆,该M个着陆圆须可由下面的算法得出。

步骤2将M个着陆圆进行降序排列得到新的组合M′,令T为最终备选着陆圆数量,T符合式(22)的条件:

式中,ri为第i(i=1,2,…,M)个着陆圆的半径。
图8(a)为经过以上两个步骤提取到的37个半径由大到小的备选着陆圆,从中可以看出,这些着陆圆相比较障碍物区域具有较为平整的地形;图8(b)为备选着陆圆半径归一化后的排列关系,图中,纵坐标ncr表示归一化半径。

图8 备选着陆圆及半径
4 最佳着陆圆的选取
最佳着陆圆的选取需要从4个方面进行考虑:着陆圆的半径、着陆圆的连通性、着陆圆的纹理以及着陆圆心与障碍物的集群关系。由于着陆圆的半径已在上一节进行了分析,下面将对另外3个指标进行讨论。
4.1 着陆圆的连通性
考虑到着陆器着陆后释放的巡视器要有较大的巡视范围,所以着陆器着陆的着陆圆附近要有较少的障碍物,并且着陆圆之间要有较好的连通性。着陆圆的连通性在本文定义为:假设存在3个着陆圆A、B、C,并且O1、O2、O3分别为3个着陆圆心。如果A∩B≠Ø并且A∩C=Ø和B∩C=Ø,如图9(a)所示,则A与B相连通,C与A和B均不具备连通性;如果A∩B≠Ø并且B∩C≠Ø,但是A∩C=Ø,如图9(b)所示,则A与C相连通。在图9(a)中的AB以及图9(b)中的ABC均称为连通区域。单独的圆可认为与自身连通,如图9(a)中的圆C。

图9 着陆圆的连通关系示意图
本文基于广度优先搜索遍历算法提出了一种连通区域的查找方法,该方法可分为以下3个步骤。
步骤1假设有T个备选着陆圆,对该备选着陆圆以半径大小进行升序排列,于是得到备选着陆圆的半径排列向量R和圆心位置排列向量P。
步骤2建立一个T×T矩阵W,该矩阵记录了当前备选着陆圆的连接关系,连接关系符合下面的式子:

式中,i,j=1,2,…,T。
步骤3基于下面的算法对连通区域进行查找。____

图10展示了图8(a)中连通区域查找结果,连通区域用黄色线段对其圆心进行了连接。

图10 连通区域查找结果
假设存在T个备选着陆圆,且有Q个连通区域,则每个连通区域的连通性表示为

式中,acj为第j个连通区域的连通性;Kj表示第j个连通区域有Kj个着陆圆;area为第j个连通区域中的第k个着陆圆。本文规定每个着陆圆的连通性等同于所在连通区域的连通性,即:cci=acj且cci⊂acj,其中cci为第i个着陆圆的连通性,i=1,2,…,M,j=1,2,…,Q。若将着陆圆的连通性进行归一化,可以表示为

式中,ncci表示第i个着陆圆归一化后的连通性。
图11为着陆圆的归一化连通性,从中看出在相同连通区域的着陆圆具有相同的连通性。

图11 着陆圆的归一化连通性
4.2 着陆圆的纹理
本文第1节介绍了障碍检测,但是这并不意味着没有障碍物的区域一定是适合着陆器着陆的,因为一些不平坦的区域无法通过障碍检测的方法进行确定,所以本文介绍一种通过检测着陆圆纹理的方法确定其平坦性。
利用文献[19]提出的一致性度量对着陆圆的纹理特征进行统计,该方法可以用式(26)表示:

式中,u代表一致性度量;z为代表灰度级的变量;p(zi)为第i个灰度级zi的像素点数量在整个图像直方图中所占的比例,i=1,2,…,L,L为可区分的灰度级数目。
假设存在T个备选着陆圆,若将着陆圆一致性度量归一化,可表示为

式中,nct表示着陆圆归一化后的一致性度量,ui为序号为i的着陆圆。图12为图8(a)中着陆圆归一化一致性度量,从中看出,一致化度量高的着陆圆在图像中纹理单一,地形平坦,而一致化度量较低的着陆圆在图像中的纹理较为复杂。

图12 着陆圆的归一化一致性度量
4.3 着陆圆心的障碍物集群性
本节提出了一种表示障碍物集群性方法,该方法能表示图像中的任意位置与障碍物的位置关系。假设计算图像中某一点P与图像障碍物的位置关系wp,如果图像中存在N个障碍物体,并且点P到这N个障碍物的重心的欧式距离表示为:di(i=1,2,…,N),当di≤10个像素时,di=10;障碍物的大小表示为:wi(i=1,2,…,N),即为每个障碍物所占的像素点的数量,点P与图像障碍物的位置关系表示为

图13展示了图2(a)中每一个坐标点的wp值,其中图像的横纵坐标分别表示图像的横纵尺寸,从中看出,蓝色深的区域具有较小的wp值,并且障碍物分布越稀少,距离图像中其他的障碍物较远,反之,浅蓝色和非蓝色区域有较大的wp值,障碍物分布较多,距离图像障碍物较近。

图13 wp值高程图
下面分析备选着陆圆心的wp值,假设存在T个备选着陆圆,若将着陆圆圆心的wp值归一化,可表示为

式中,ncwi为第i个着陆圆心归一化的wp值。
图14展示了图8(a)中着陆圆心的归一化wp值,结合图13可以看出具有较大的ncw值的着陆圆心基本分布在蓝色较浅的区域,而较小的ncw值的着陆圆心分布在蓝色较深的区域。

图14 着陆圆心的归一化wp值
4.4 最佳着陆圆的提取
本文根据着陆圆的半径大小,连通性,纹理以及着陆圆心的障碍物集群性提出了一种最佳着陆圆的选区方法:指标计分加权法,步骤如下。

步骤2根据指标的平均值,计算每个备选着陆圆的分数。

所以备选着陆圆的分数为指标的分数加和。
步骤3输出最佳着陆圆。
若N′为分数最高的备选着陆圆的数量,若N′=1,输出当前着陆圆;若N′>1,设定综合指标ind,其中,i=1,2,…,N′,j=1,2,…,n,n为指标项数,令ind=ncri,ind=,然后计算综合指标的加和,即最后以具有最大综合指标和的着陆圆为最佳着陆圆。
图15为最佳着陆圆选取示意图,其中图15(a)为步骤2中计分最高的着陆圆,着陆圆的序号分别为:2、4、7,根据图10,2号和7号着陆圆在同一个连通区域,而4号着陆圆在另外的连通区域,并且2号和7号着陆圆所在的连通区域面积大于4号着陆圆所在的连通区域;观察图11,2号着陆圆的一致性度量在3个着陆圆中处于最高值;观察图14,4号着陆圆的wp值最高,2号和7号着陆圆的wp值基本持平,这说明4号着陆圆的地面特征在三者中最为复杂;由于2号着陆圆的半径在三者中最大,所以结合步骤3得出2号着陆圆为最佳着陆圆,如图15(b)所示。

图15 最佳着陆圆选取示图
5 实 验
5.1 针对障碍检测方法的对比
图16给出了文献[5]中3幅星体表面图像,其中图16(a)和图16(b)两幅图像为星体表面的模拟图像,从中可以看出由于光照角度的不同,障碍物(石块)的阴影区的大小不同。图16(c)[23]为433 Eros的星体表面图像,从中看出石块在光照下形成较为明显的阴影区。下面实验用本文的障碍物检测方法与文献[1]和文献[8]的相关方法进行对比。

图16 3幅星体表面地形图像
图17给出了3个算法的对比结果,它们的运行时间分别为:文献[1]:1.5 s,文献[8]:2.3 s,本文算法:1.4 s。从效果上看,文献[1]可以根据当前阴影区的大小和形状能估计出岩石的位置和尺寸(图中的椭圆为估计出的岩石,椭圆的方向,大小和形状体现了估计出的岩石的放置位置,形状以及大小),但是障碍物尺寸的估计往往受光照角度的影响较大,图16(a)和图16(b)的光照角度存在明显的不同,利用文献[1]的方法估计出的石块的大小和尺寸存在明显的差异。文献[8]对于障碍物的检测具有较好的结果,但是检测出的障碍物图像为非二值化图像,还需设定阈值对障碍物的信息进行提取,但是障碍物的提取效果对于阈值的设定较为敏感。虽然本文算法检测出的障碍物存在较多的噪声,但是和文献[1]以及文献[8]的方法相比岩石的轮廓效果较好,在不同光照角度下检测到的强光照区域具有相似的位置和尺寸,然而利用文献[1],岩石的位置和尺寸在不同的光照条件下的估计差异较大。

图17 3种算法的对比结果
5.2 安全着陆区的选取对比
针对安全着陆区的选取本节进行两组对比实验,第一组的对比对象为文献[1]的相关方法,由于文献[1]对备选着陆区域的选取方法在细节上没有详细的介绍,所以本文只能针对文献[1]中用到的图像进行实验,然后将实验结果与文献[1]中的进行对比。由于本文方法是基于文献[17]的改进,并且为了说明避封闭区域的必要性,第二组实验与文献[17]的相关方法进行对比。
5.2.1 第一组对比实验
图18给出了文献[1]的一幅图像,图像中的岩石在一定的光照条件下文献的实验部分用提出的方法对安全着陆区域进行了提取,如图19(a)所示,从中看出文献[1]的方法选出了多个备选着陆区。图19(b)为应用本文方法的到的备选着陆圆,一共有38个半径不同的着陆圆被选出,并且这些备选着陆圆包含了大部分文献[1]得到的着陆区域。图19(c)给出了利用本文方法得到的最终着陆圆,从中可以看出最终着陆圆相比其他着陆圆具有较大的半径,内部的纹理相对简单,着陆圆的圆心距离周围的障碍物较远,并且该着陆圆与其他备选着陆圆具有较好的连通性,所以可以作为理想的着陆区域。

图18 文献[1]中的一幅图像

图19 本文方法与文献[1]方法在着陆区域选择上的对比
5.2.2 第二组对比实验
图20展示了4种不同的星表地形,图20(a)(http:∥nssdc.gsfc.nasa.gov/planetary/mission/near/descent_images/near_descent_157416593.html)为Eros433的地表图像,该区域分布有一些大小不等的石块,并且部分非障碍区域的表面较为粗糙。图20(b)为火星某区域的地表图,该区域在火星上的坐标为:21°38′7.52″N,173°36′22.45″W,该区域陨石坑内部的地形较为平坦,并且陨石坑的边缘部分形成了明显的环形山,陨石坑外部分布有地形平坦的区域。图20(c)也为火星某区域地表图,该区域在火星的坐标为:24°12′6.30″N,176°35′18.90″W,在图中有两个明显的陨石坑,并且陨石坑的特征明显不同。左上方的陨石坑所形成的环形山较为明显,并且陨石坑内部地势凹凸明显,右下方的陨石坑所形成的环形山相比第一个较为模糊,并且陨石坑周边形成了复杂多变的地形,但是陨石坑内部却有着非常平坦的地形。图20(d)为月球某区域图像(http:∥lroc.sese.asu.edu/),该区域较之前3幅,其地形最为复杂,并且分布有许多大小不等的陨石坑,陨石坑内部和周边均较少分布有地形平坦的区域。现在假设在这四幅图像中距离地面的高度均为2 km,相机的焦距为5 cm,并且着陆器的长宽L和S均为3 m,λ为0.1,λ为着陆器的膨胀系数,在本实验中所有的着陆区域均为算法的自动选取,未考虑特定的科学兴趣区域。实验环境为Matlab2013a,Win7操作系统,1G内存,Core i3处理器。

图20 4种不同星体的地形图像
图21为文献[17]和本文方法结果的对比,在文献[17]中,所有的最终着陆圆为探测到的半径为最大的圆,在20(a)中,文献[17]的方法所得到的圆内部的纹理相比本文方法要复杂,并且周边分布有较多的障碍物石块,虽然本文得到的着陆圆的右上方有一个大的石块,但是所选着陆圆的纹理较为单一,地形较为平坦。所以本文算法结果针对图20(a)得到了更为合适的着陆区。在图20(b)中,文献[17]得到的着陆圆位于陨石坑的内部,虽然该区域范围较大,并且区域的纹理特征单一,地形平坦,但是该区域在陨石坑的内部,如果着陆器降落于此会导致释放的巡视器无法走出陨石坑,从而造成巡视器的探测范围受限,无法向其他区域进行探索。本文算法得到的着陆圆则选择了陨石坑的周边区域,虽然该着陆圆的半径与文献[17]得到的最大着陆圆相比较小,但是可以使得巡视器有更加广阔的巡视范围,本文算法之所以未把着陆圆选择在陨石坑内是因为陨石坑的边界布满了突起的环形山,这些环形山所形成的障碍物使得陨石坑内部的wp值要明显大于陨石坑的周边地区,所以具有较高wp值的着陆圆心不易在最佳着陆圆选取的过程中胜出。在图20(c)中,着陆圆选择在了边缘较为模糊的陨石坑内,虽然在该区域中巡视器能通过搜寻路径绕出陨石坑,但是本文算法得到的着陆圆区域则避免了搜寻过程。在图20(d)中,本文方法和文献[17]方法均选择了相同的区域,即该区域地形较为平坦,并且均躲避了陨石坑。所以从该实验中可以看出,本文方法不但能选择地势平坦的区域,也考虑了接下来的巡视器的巡航范围,使其能着陆在在障碍物较为稀少,并且避免降落在地势平坦但是环境封闭的区域。

图21 文献[17]方法与本文方法的对比
针对两种方法在运行时间的上的比较如表1所示,从中可以发现本文方法所需的时间要明显多于文献[17]的方法,这是因为本文的方法是在文献[17]的基础上进行提出的,更确切的说是文献[17]方法的一种再加工,多出了着陆圆之间的连通性分析,着陆圆的纹理分析以及最终着陆圆的选择上的运行时间,所以本文方法虽然在避封闭环境的功能上具有一定的优势,但是方法的时效性还有待于提高。
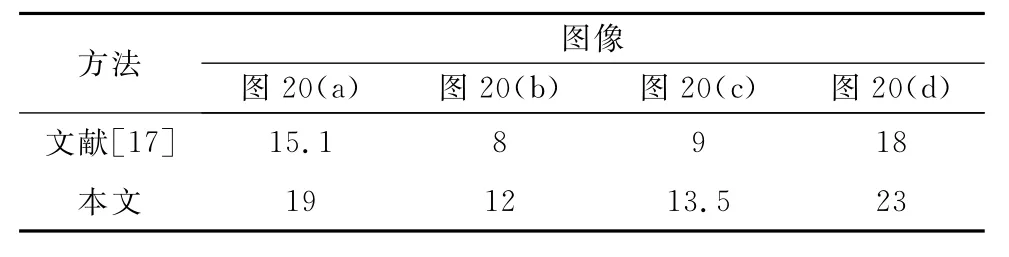
表1 本文方法和文献[17]的运行时间的比较 s
6 结 论
本文在文献[17]的基础上提出了一种新的安全着陆区的搜索方法,该方法首先在障碍物检测中运用了本文提出的DBTSSI算法,在着陆圆的选择方面考虑了圆半径,着陆圆的连通关系,着陆圆的纹理以及着陆圆心得障碍物集群性4方面的决策因素,并且对于最佳着陆圆的选择提出了一种加分加权法。最后通过对比实验表明,本文算法不但能为着陆器选择出地势平坦和范围较大的区域,也能使其落入障碍物较为稀少,并且避免其落入地势封闭的环境,为接下来的巡视器的探索带来更广阔的巡航空间。但是,本文所提方法的时效性目前还不能满足于实际的工程应用中,所以如何提高方法的时效性将是未来研究工作的重点。
[1]Huertas A,Cheng Y,Madison R.Passive imaging based multicue hazard detection for spacecraft safe landing[C]∥Proc.of the IEEE Aerospace Conference,2006.
[2]Brady T,Robertson E,Epp C.Hazard detection methods for lunar landing[C]∥Proc.of the IEEE Aerospace Conference,2009.
[3]Neveu D,Mercier G,Hamel J F,et al.Passive versus active hazard detection and avoidance systems[C]∥Proc.of the 9th International ESA Conference on Guidance,Navigation&Control Systems,2014:1- 8.
[4]Serrano N,Seraji H.Landing site selection using fuzzy rulebased reasoning[C]∥Proc.of the IEEE International Conference on Robotics and Automation,2007:4899- 4904.
[5]Kapur J N,Sahoo P K,Wong A K C.A new method for gray-level picture thresholding using the entropy of the histogram[J].Computer Vision,Graphics,and Image Processing,1985,29(3):273- 285.
[6]Crane E S,Rock S M.Guidance augmentation for reducing uncertainty in vision-based hazard mapping during lunar landing[C]∥Proc.of the Aerospace Conference,2013:1- 12.
[7]Crane E S,Rock S M.Influence of trajectory on accuracy of hazard estimation during lunar landing[C]∥Proc.of the AIAA Guidance,Navigation,and Control Conference,2012:1- 15.
[8]Feng J,Cui P Y,Cui H T.Autonomous hazard detection and land-ing point selecting for planetary landing[C]∥Proc.of the Systems and Control in Aeronautics and Astronautics,2010:1292- 1296.[9]Cheng Y,Johnson A E,Mattheis L H.Passive imaging based hazard avoidance for spacecraft safe landing[C]∥Proc.of the Aerospace Conference,2006:1- 8.
[10]Ding M,Cao Y F,Wu Q X.Passive image-based safe landing site searching and slope estimation in probe landing[J].Journal of Astronautics,2009,30(6):2258- 2263.(丁萌,曹云峰,吴庆宪.月球着陆器着陆中基于被动图像的着陆场搜索及坡度估计[J].宇航学报,2009,30(6):2258- 2263.)
[11]Mahmood W,Shah S M A.Vision based hazard detection and obstacle Avoidance for planetary landing[C]∥Proc.of the Nonlinear Dynamics and Synchronization,2009:175- 181.
[12]Rogata P,Di S E,Camara F,et al.Design and performance assessment of hazard avoidance techniques for vision-based landing[J].Acta Astronautica,2007,61(1):63- 77.
[13]Horn B K P.Height and gradient from shading[J].International Journal of Computer Vision,1990,5(1):37- 75.
[14]Janschek K,Tchernykh V,Beck M.Performance analysis for visual planetary landing navigation using optical flow and dem matching[C]∥Proc.of the AIAA GNC Conference,2006:1- 17.
[15]Zhang Z X,Cui P Y.An algorithm of rock detection and avoidance for planetary soft landing based on CCD landing camera[J].Journal of Astronautics,2008,29(6):1510- 1516.(张泽旭,崔平远.基于CCD着陆相机的行星软着陆岩石检测与规避方法[J].宇航学报,2008,29(6):1510- 1516.)
[16]Huang X Y,Zhang H H,Wang D Y.Autonomous navigation and guidance for Chang’e3 soft landing[J].Journal of Deep Space Exploration,2014,1(1):52- 59.(黄翔宇,张洪华,王大轶.“嫦娥三号”着陆器软着陆自主导航与制导技术[J].深空探测学报,2014,1(1):52- 59.)
[17]Shao W,Cui P Y,Cui H T.An algotithm of site detection for spacecraft safe landing based on morphology[J].Journal of Astronautics,2008,29(2):659- 664.(邵巍,崔平远,崔祜涛.一种基于形态学的着陆器安全着陆点选择方法[J].宇航学报,2008,29(2):659- 664.)
[18]Ruan X G,Wei R Y,Li J G.Method of tracking for soft landing on small body based on shadow areas[J].Control and Decision,2014,29(9):1581- 1586.(阮晓钢,魏若岩,李建更.一种小天体软着陆中基于地表阴影区的跟踪算法[J].控制与决策,2014,29(9):1581- 1586.)
[19]Gonzalez R C,Woods R E.Digital image processing[M].New Jersey:Pearson Education,2002.
[20]Geng D W,Song Z J,Jiang X W.Scanning arithmetic for softlanding based on time optimization[J].Chinese Space Science and Technology,2006,26(4):6- 10.(耿殿伍,宋政吉,姜兴渭.月球软着陆的时间最优安全着陆区搜索算法[J].中国空间科学技术,2006,26(4):6- 10.)
[21]Wang D Y,Li J,Huang X Y.A point autonomous navigation and hazard avoidance method for lunar soft landing[J].Journal of Deep Space Exploration,2014,1(1),51- 54.(王大轶,李骥,黄翔宇.月球软着陆过程高精度自主导航避障方法[J].深空探测学报,2014,1(1),51- 54.)
[22]Scott M.NEAR image of the day for 2001 Feb 12(E)[EB/OL].[2014- 12- 31].http:∥near.jhuapl.edu/iod/20010212e/index.html.
Planetary surface landing area selection based on single image and closed environment avoidance
WEI Ruo-yan1,RUAN Xiao-gang1,XIAO Yao1,ZHU Xiao-qing1,3,HUANG Jing1,4
(1.School of Electronic Information and Control Engineering,Beijing University of Technology,Beijing 100124,China;2.College of Information Technology,Hebei University of Economics and Business,Shijiazhuang 050061,China;3.Center for Intelligent Machine,McGill University,Montreal H3A0C3,Canada;4.The Pilot College,Beijing University of Technology,Beijing 101101,China)
For avoiding the lander landing on the flat areas in a closed environment in the process of soft landing on asteroid,a landing area selection method based on a single image is proposed.Firstly,the proposed method of binary is applied to extract hazards,and the skeleton of areas with no hazards is extracted.Secondly,take the intersection points with three lines of the skeleton as the center of landing circles.Finally,the best landing circle can be obtained by the scoring method with the help of radius,connection among circles,circle’s texture characters,and the cluster feature of circle’s center with all the hazards.Compared with other methods the proposed landing area selection method is highlighted with fewer obstacles,and can avoide landing on the place in a closed environment.
landing area;surface of asteroid;hazards avoidance;closed environment
TP 391
A
10.3969/j.issn.1001-506X.2015.12.21
魏若岩(198-4- ),男,讲师,博士,主要研究方向为模式识别与智能系统。
E-mail:weiruoyan1984@163.com
阮晓钢(1958- ),男,教授,博士研究生导师,博士,主要研究方向为控制科学、模式识别。
E-mail:adrxg@bjut.edu.cn
肖 尧(198-8- ),男,博士研究生,主要研究方向为模式识别与智能系统。
E-mail:siaoyao@126.com
朱晓庆(1987- ),男,博士,主要研究方向为机器人、机器学习。
E-mail:553455117@qq.com
黄 静(1979- ),女,博士研究生,主要研究方向为机器学习。
E-mail:757488601@qq.com
1001-506X(2015)12-2799-11
2014- 11- 27;
2015- 04- 29;网络优先出版日期:2015- 07- 06。
网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20150706.1606.010.html
国家自然科学基金(61075110,61375086);国家重点基础研究发展计划(973计划)(2012CB720000);北京市自然科学基金项目/北京市教育委员会科技计划重点项目(KZ201210005001);高等学校博士学科点专项科研基金(20101103110007);北京高等学校青年英才计划(YETP1610)资助课题
