修正的垂直航向运动补偿算法
2015-06-05舒奂泽胡庆荣王冠勇
邢 涛,舒奂泽,胡庆荣,李 军,王冠勇
(1.北京无线电测量研究所,北京100854;2.电子科技大学物理电子学院,四川成都610054)
修正的垂直航向运动补偿算法
邢 涛1,舒奂泽2,胡庆荣1,李 军1,王冠勇1
(1.北京无线电测量研究所,北京100854;2.电子科技大学物理电子学院,四川成都610054)
机载毫米波高分辨合成孔径雷达(synthetic aperture radar,SAR)对运动补偿的精度要求很高。当前运动补偿算法在运动误差或斜视角大时对毫米波高分辨斜视SAR垂直航向运动误差补偿效果不明显。文中提出了一种修正的垂直航向运动补偿算法,通过先补偿包络和相位,然后产生一个附加的沿航向速度,该附加沿航向速度和原始的沿航向运动误差一起补偿。毫米波高分辨斜视SAR仿真结果表明,所提方法在30°斜视角时仍能较好补偿垂直航向运动误差,补偿效果显著优于已有算法,实测数据成像结果也进一步验证了所提方法的正确性和有效性。
合成孔径雷达;运动补偿;垂直航向;高分辨
0 引 言
随着目标识别应用及察打一体化的发展,对高分辨合成孔径雷达(synthetic aperture radar,SAR),特别是毫米波高分辨SAR提出了明确的要求[14]。机载毫米波SAR在飞行过程中容易受气流和机械不稳定的影响造成波束的斜视,在一些特定应用中也需要将波束作斜视[58]。毫米波高分辨SAR对运动误差非常敏感,对运动补偿精度要求很高。因此研究斜视下的毫米波高分辨SAR高精度运动补偿技术是很有现实意义的。
SAR运动补偿所需的运动参数可以通过机载惯性设备读取,也可以通过对回波数据进行估计得到[911]。当前研究所内毫米波SAR随载机配备了高精度测量仪器,能够获得精度很高的运动参数。因此本文主要研究利用机载设备读取的运动参数来进行高精度的运动补偿。SAR的运动补偿分为沿航向运动补偿[9-13]和垂直航向运动补偿[9,11,13],沿航向运动补偿可参考文献[9- 13],本文主要研究垂直航向运动补偿方法。
垂直航向运动误差来源于垂直航向的速度分量。文献[9]给出了基于正侧视成像模型的垂直航向运动补偿方法,得到了广泛的应用。对于斜视SAR,文献[11]给出了基于斜视成像模型的斜视SAR垂直航向运动补偿方法,在X波段,该方法补偿效果很明显。在毫米波高分辨SAR中,文献[11]方法在运动误差或斜视角大时补偿效果不明显。文献[13]提出了一种基于聚束SAR的运动补偿方法,该方法用在条带SAR中存在距离单元徙动校正(range cell migration correction,RCMC)校不直,聚焦效果优于文献[11]方法,但也不够好。
本文结合文献[11]方法和文献[13]方法的特点,提出了修正的垂直航向运动补偿方法。所提方法利用文献[11]方法进行RCMC,然后根据文献[13]附加的方位位移思路,提取出一种附加的沿航向速度,与原始的沿航向运动误差一起进行沿航向补偿,该补偿采用非均匀快速傅里叶变换[10,1416](non-uniform fast Fourier transform,NUFFT)进行。毫米波高分辨斜视SAR仿真实验表明,所提方法在30°斜视角时能较好补偿垂直航向运动误差,点目标聚焦质量比已有算法有明显提高。毫米波高分辨实测数据成像结果表明,相比文献[11]方法,所提方法成像质量得到了明显改善。
1 当前补偿方法
存在垂直航向误差时的成像几何关系如图1所示,Vx为沿航向方向,雷达(载机)沿Vx方向运动,不存在沿航向误差时Vx为常数。存在垂直航向运动误差时,存在一个垂直Vx的速度Vy,波束指向(斜视角)为θ0,P为点目标。

图1 成像几何关系
以方位0时刻为起点,在tm时刻,垂直航向的位移为

距离频域、方位时域的信号[9]为
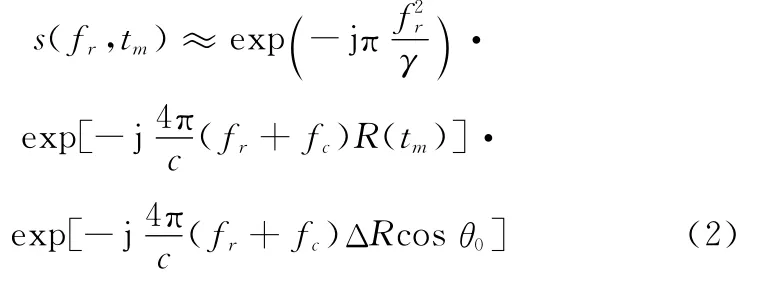
式中,R(tm)为不存在垂直航向速度误差时,天线相位中心和点目标间的距离;ΔR cosθ0为垂直航向速度引入的位移在波束方向上的投影距离。根据文献[11]定义运动补偿表达式:

式(2)乘以式(3),得

式(4)中垂直航向的运动误差分量已经补偿完毕,接下来可进行后续的成像处理。对于实测数据,为三维成像几何,需要考虑垂直向上的速度分量,并且要考虑距离的空变补偿。
文献[13]针对聚束SAR提出了一种运动补偿方案,修改运动补偿表达式式(3)为

式(2)乘以式(5)进行误差补偿,然后定义一个附加的方位位移量:

式中,ΔA与沿航向的运动误差一起插值进行补偿。
2 修正的补偿方法
包络和相位补偿宜采用式(3),而不是式(5)。进行包络和相位补偿后,继续进行式(6)对应的附加位移的补偿。
方位tm时刻的附加速度为

根据式(7),d Vx对tm的导数为

当且仅当Vy(tm)为常数时,式(8)为零,此时d Vx为与tm无关的常数,否则d Vx为时变得沿航向速度。设原始的沿航向速度为Vx0,则新的等效的沿航向速度为

根据式(9),可采用基于NUFFT的沿航向运动补偿算法进行沿航向的运动补偿。
3 仿真与实测数据成像实验
仿真系统参数如表1所示,点目标设置如图2所示。场景中心处RCMC后的结果如图3~图6所示。
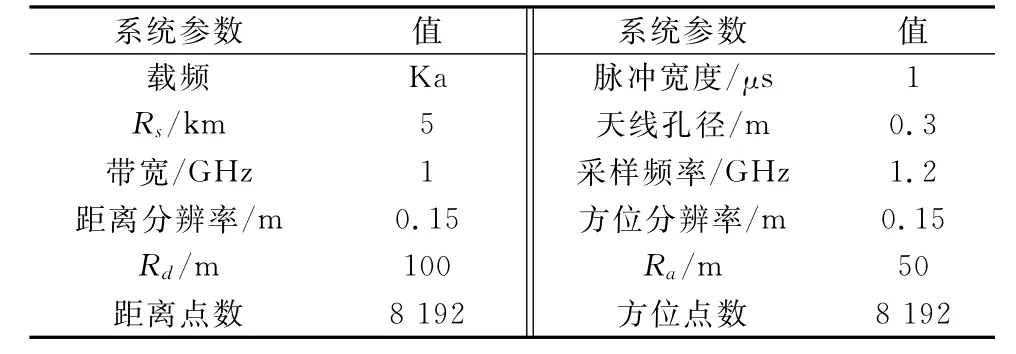
表1 _算法仿真参数
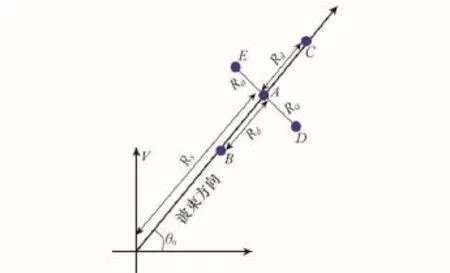
图2 点目标设置示意图

图3 斜视角为0°时RCMC结果

图4 斜视角为10°时RCMC结果

图5 斜视角为20°时RCMC结果

图6 斜视角为30°时RCMC结果
图3~图6中,所提方法和文献[11]方法由于都是通过式(3)进行距离维补偿,因此RCMC结果是一样的。从图中可以发现,斜视情况下文献[13]方法不能很好地进行RCMC。
仿真采用的初始沿航向速度及垂直航向速度(视线向速度)均从实测数据中提取,如图7所示,对应的附加沿航向速度如图8所示。图8表明:附加沿航向速度绝对值随着斜视角增大而增大。文献[11]方法和文献[13]方法在A点的成像结果如图9所示。图9表明:文献[11]方法和文献[13]方法在正侧视时能有效补偿垂直航向运动误差,在斜视角为10°以上时,两种方法补偿效果有限。所提方法成像结果如图10所示。
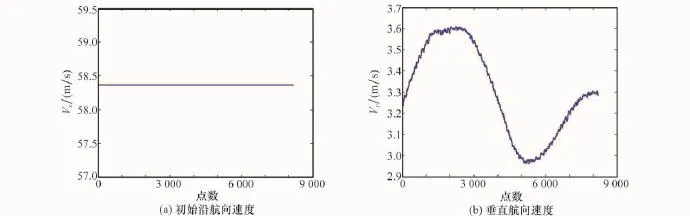
图7 系统速度分量

图8 附加沿航向速度

图9 点目标A的成像结果

图10 所提方法成像结果
图10表明:所提方法补偿效果较已有方法改善较为明显,在30°斜视角以内时补偿效果较好。
对于相同的系统参数,保留点目标A~C,增大距离幅宽d R=800 m,成像点数16 384×4 096(距离×方位),垂直航向速度如图11所示。点目标成像结果如图12所示。

图11 第2种垂直航向速度误差
图12仿真下,本文方法仍能较好地补偿垂直航向运动误差。
3种算法对毫米波高分辨SAR实测数据的成像结果如图13所示,截取图13中绿线框里面的场景进行放大,如图14所示。实测数据的斜视角在6.15°左右,系统参数与表1的仿真参数相仿。
图14表明:在6.15°斜视角时,文献[13]方法和本文方法在方位的聚焦质量都比文献[11]方法要好。由于斜视角比较小,在图14中,文献[13]方法成像结果和本文方法成像结果比较接近,差异不明显。

图12 距离大幅宽下成像结果

图13 斜视角为6.15°时成像

图14 斜视角为6.15°时截取图像
4 结 论
本文对当前已有的垂直航向运动补偿算法进行了改进,提出了修正的垂直航向运动补偿算法。毫米波高分辨SAR的仿真实验表明,所提算法对垂直航向运动误差的补偿效果较已有算法有了明显的提高,毫米波高分辨SAR实测数据成像结果也表明了本文算法的正确性和有效性。
[1]Ghasr M T,Case J T,Zoughi R.Novel reflectometer for millimeter-wave 3-D holographic imaging[J].IEEE Instrumentation and Measurement Society,2014,63(5):1328- 1336.
[2]Wang B Q,Li X G.Near sensing millimeter wave synthetic aperture radiometer imaging algorithms[J].Chinese Institute of Electronics,2009,37(6):1353- 1356.
[3]Fjortoft R,Gaudin J,Pourthie N,et al.KaRIn on SWOT:Characteristics of near-nadir Ka-band interferometric SAR imagery[J].IEEE Trans.on Geoscience and Remote Sensing,2014,52(4):2172- 2185.
[4]Anghel A,Vasile G,Cacoveanu R,et al.Short-range wideband FMCW radar for millimetric displacement measurements[J].IEEE Trans.on Geoscience and Remote Sensing,2014,52(9):5633- 5642.
[5]Zhang S X,Xing M D,Xia X G,et al.Focus improvement of high-squint SAR based on azimuth dependence of quadratic range cell migration correction[J].IEEE Geoscience and Remote Sensing Letters,2013,10(1):150- 154.
[6]Fiss J,Curless B,Szeliski R.Refocusing plenoptic images using depth-adaptive splatting[C]∥Proc.of the IEEE International Conference on Computational Photography,2014:1- 9.
[7]Garren D A.Smear signature morphology of surface targets with arbitrary motion in spotlight synthetic aperture radar imagery[J].IET Radar,Sonar&Navigation,2014,8(5):435- 448.
[8]Spencer M F,Thornton D E,Hyde M W,et al.Piston phase compensation of tiled apertures in the presence of turbulence and thermal blooming[C]∥Proc.of the IEEE Aerospace Conference,2014:1- 20.
[9]Bao Z,Xing M D,Wang T.Radar image technology[M].Beijing:Publishing House of Electronics Industry,2005:193- 215.(保铮,邢孟道,王彤.雷达成像技术[M].北京:电子工业出版社,2005:193- 215.)
[10]Xing T,Li J,Wang G Y,et al.An along-track motion compensation algorithm based on non-uniform fast Fourier transform(NUFFT)for SAR[J].Journal of Electronics&Information Technology,2014,36(5):1023- 1029.(邢涛,李军,王冠勇,等.基于非均匀快速傅里叶变换的SAR方位向运动补偿算法[J].电子与信息学报,2014,36(5):1023- 1029.)
[11]Li Y P.Study of the image formation and motion compensation for the mono-and bistatic SAR[D].Xian:Xidian University,2008.(李燕平.单/双基SAR成像和运动补偿研究[D].西安:西安电子科技大学,2008.)
[12]Huang Y B,Bao Z,Zhou F.A novel method for along-track motion compensation of the airborne strip-map SAR[J].Acta Electronica Sinica,2005,33(3):458- 462.(黄源宝,保铮,周峰.一种新的机载条带式SAR沿航向运动补偿方法[J].电子学报,2005,33(3):458- 462.)
[13]Nguyen M P.Refined motion compensation for highly squinted spotlight synthetic aperture radar[C]∥Proc.of the European Conference on Synthetic Aperture Radar,2012:738- 741.
[14]Xing T,Hu Q R,Li J,et al.Efficient imaging algorithm based on non-uniform fast Fourier transform for ultra-wide band synthetic aperture radar[J].Systems Engineering and Electronics,2015,37(2):291- 296.(邢涛,胡庆荣,李军,等.基于非均匀FFT的超宽带合成孔径雷达高效成像算法[J].系统工程与电子技术,2015,37(2):291- 296.)
[15]Fourmont K.Non-equispaced fast Fourier transforms with applications to tomography[J].The Journal of Fourier Analysis and Applications,2003,9(5):431- 441.
[16]Kruizinga P,Mastik F,De J N,et al.Plane-wave ultrasound beamforming using a nonuniform fast Fourier transform[J].IEEE Trans.on Ultrasonics,Ferroelectrics and Frequency Control,2012,59(12):2684- 2691.
Refined cross-track motion compensation algorithm
XING Tao1,SHU Huan-ze2,HU Qing-rong1,LI Jun1,WANG Guan-yong1
(1.Beijing Institute of Radio Measurement,Beijing 100854,China;2.School of Physical Electronics,University of Electronic Science and Technology of China,Chengdu 610054,China)
Air-borne millimeter wave high resolution synthetic aperture radar(SAR)requires high precision for motion compensation.Current motion compensation algorithm is ineffectiveness in millimeter wave high resolution squint SAR cross-track motion compensation when the motion error is serious or the squint angle is high.A refined cross-track motion compensation algorithm is proposed.The proposed algorithm first compensates envelope and phase,then produces an addition along-track velocity and the addition along-track velocity will be compensated together with the raw along-track motion error.Millimeter wave high resolution squint SAR simulation results indicate that the proposed algorithm still works well for cross-track motion compensation in 30° squint angle and the compensation results are much better than those of the existed compensation algorithms.Real data imaging results again verify the correctness and effectiveness of the proposed algorithm.
synthetic aperture radar(SAR);motion compensation;cross-track;high resolution
TN 957
A
10.3969/j.issn.1001-506X.2015.12.14
邢 涛(198-6- ),男,博士研究生,主要研究方向为雷达成像技术。
E-mail:1mingzongyue@163.com
舒奂泽(1992- ),男,主要研究方向为雷达成像技术。
E-mail:13488655660@139.com
胡庆荣(1974- ),男,研究员,博士,主要研究方向为雷达成像技术。
E-mail:328298074@163.com
李 军(198-2- ),男,高级工程师,博士,主要研究方向为雷达成像技术。
E-mail:LiJun_jun@163.com
王冠勇(198-9- ),男,硕士研究生,主要研究方向为雷达成像技术。
E-mail:Wang_GY@163.com
1001-506X(2015)12-2751-07
2014- 03- 05;
2015- 05- 22;网络优先出版日期:2015- 07- 07。
网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20150707.1423.007.html基金项目:国家自然科学基金(61271417)资助课题
