GNSS接收机欺骗干扰功率控制策略
2015-06-05胡彦逢边少锋曹可劲冯国利
胡彦逢,边少锋,曹可劲,冯国利
(海军工程大学 导航工程系,武汉 430033)
GNSS接收机欺骗干扰功率控制策略
胡彦逢,边少锋,曹可劲,冯国利
(海军工程大学 导航工程系,武汉 430033)
为保持对目标接收机的持续有效欺骗,增强欺骗干扰的隐蔽性,从信号传播损耗、噪声基底、仰角因素等方面对欺骗干扰的功率控制问题进行了定量的分析,得出了一种欺骗功率控制策略。该方法通过实时调整欺骗干扰的总功率及各支路信号功率,使得噪声基底的抬高幅度和最大欺骗信号信噪比限制在一定范围内。仿真表明,通过实时调整欺骗功率,可以将噪声基底限制在3 dB内,将最大欺骗信号信噪比限制在22 dB内,实现持续有效欺骗。该方法可行性较强,对欺骗干扰机的研制具有重要的指导意义。
卫星导航接收机;欺骗干扰;功率控制;传播损耗;噪声水平
目前卫星导航系统(GNSS)的应用已经遍布社会的各个角落,给我们的生活提供了巨大的便利,社会对其具有很强的依赖性。GNSS易受干扰的特点使得其安全性受到巨大的威胁[1-5]。
干扰模式可以分为压制干扰和欺骗干扰。压制干扰由于发射信号功率较大,易暴露目标而遭受攻击,相对而言欺骗干扰不需要发射太强信号。因此欺骗干扰相对与压制干扰在隐蔽性等方面具有特有的优势使其威胁性更大。国内外文献关于欺骗干扰技术的研究较少涉及欺骗信号功率控制问题,且大多是定性分析[6-9],缺乏定量分析。
欺骗与抗欺骗技术是矛与盾的关系,可以应对所有欺骗的抗欺骗方法是不存在的,而能欺骗所有导航设备的欺骗技术也是不存在的,两者都必须有一定的前提条件[7]。对于具有一定欺骗识别能力的导航接收机,当其被成功牵引到欺骗信号上来后,如何控制功率而不被接收机察觉异常,便成了有效实施实时持续欺骗的关键。鉴于此,本文分别从信号传播损耗、噪声基底估计、仰角因素等层面定量讨论了欺骗信号功率的控制策略,并进行了仿真分析。
1 信号传播损耗模型
根据信号在自由空间的传播理论,信号传输功率与传播距离的平方成反比。假设信号源发射天线发射到距离接收天线Ro(单位为m)时的功率为Po(单位为dBW),则信号经过距离RL的传输后,功率衰减为PL,表达式如下:

对于美国的GPS导航系统,一般的接收机噪声功率N0约为-205 dBW/Hz,接收机接收到的载波L1上的C/A码信号功率约为-163 dBW和-153 dBW范围之间,与之相对应的载噪比变化范围为38~48 dBHz。
GPS卫星信号从距离地面约20 000 km的高空到达地面,信号已经很弱,这时候接收机位置小范围的移动可以认为接收到的真实卫星信号信噪比保持不变。对于通过同一天线发射的欺骗信号,由于距离接收机相对较近,这时接收机的位置变化会引起信噪比的变化。已知信号传输功率与传播距离的平方成反比,假设在干扰源距离接收机1 m时,接收机接收到的欺骗信号载噪比为55 dBHz,则随着干扰源与接收机之间距离的变化,载噪比变化曲线如图1所示。

图1 信号传播损耗曲线Fig.1 Loss in signal propagation
为了使接收机接收到的欺骗信号功率保持稳定,需要根据接收机与干扰源的相对位置关系进行实时功率调整,使接收机接收到的信号功率保持在一定范围内。
2 欺骗信号对噪声基底的影响
欺骗信号的入侵会导致噪声基底的抬高,欺骗信号并不是越强越好,太强会导致噪声基底超过噪声门限报警。此外,欺骗信号信噪比的也会随之提高,一旦超过最大信噪比门限也会引起异常报警。因此需要根据噪声基底对欺骗信号发射功率进行实时调整。
2.1 噪声基底估计
跟踪阶段噪声估计可以通过不在信号里的伪码与之进行相关实现。复数信号模型如下:

式中:上标h和m分别表示接收到的真实卫星信号和欺骗信号,i表示为第i路信号,Ts是采样间隔,P表示接收信号的功率,c表示PRN码序列,D是导航电文,φ、f、τ分别表示载波相位,多普勒频率和码相位,η(nTs)为均值为零方差为σn2的加性高斯白噪声。

式中:伪码cl不在信号包含的伪码里,、分别表示本地载波频率和码延迟,k表示积分间隔。
噪声估计量包括三部分:①真实信号产生的相关干扰;②欺骗信号产生的相关干扰;③高斯噪声产生的相关干扰。其中分别表示一路真实和一路欺骗信号与本地码和载波的相关参量。由于这里是复数信号,因此二者均包含相互正交的I支路和Q支路,并且I支路和Q支路均服从零均值高斯分布。则用以I支路和Q支路为随机变量的二维协方差矩阵表示:

噪声产生的相关值仍为零均值高斯噪声,η[k]可以用同样的分布表示为:

则噪声方差估计可表示为:

2.2 影响噪底因素仿真分析
定义自变量欺骗信号总功率Ptotal,sp:

令相干积分周期Tcoh=NTs(Ts为采样时间间隔,N为采样点数),环境噪声功率N0= -204 dBW/Hz,单路真实信号平均功率为-158 dBW,真实信号与欺骗信号均为10路。则可根据式(7)得出噪声估计与自变量Ptotal,sp及相干积分时间长度之间的关系如图2所示。
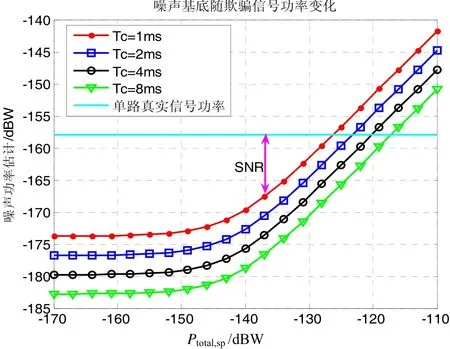
图2 噪声基底估计与 Ptotal,sp之间的关系Fig.2 Relationship between noise floor estimation and Ptotal,sp
由图2可知,当欺骗信号总功率处于比较低的水平时(小于-143 dBW),环境高斯噪声对噪声估计占主导作用,而环境噪声是相对固定的,因此在这种情况下,噪声功率估计基本不变(如图2中,-170~-143 dBW噪声功率估计曲线基本保持水平)。然而,随着欺骗信号不断增强时,欺骗信号功率渐渐超过了真实信号功率,逐渐成为了影响噪声功率估计的主要因素,导致噪声功率估计上升,也就是说这时欺骗信号功率的增强抬升了噪声基底。针对不同相干积分时间1 ms、2 ms、4 ms以及8 ms这几种不同相干积分时长的对比可以发现,相干积分时间的增加并没有改变欺骗信号对噪声基底抬升的效果(变化曲线斜率),只是使得噪声基底在其基础上形成了一定的垂直差值(约3 dBW)。
对于GPS L1 C/A码信号而言,温度为300°K,相干积分时间为1 ms时,最大信噪比约为22 dB。将噪声估计曲线与真实/欺骗信号信噪比变化曲线在同一图中表示如图3所示。
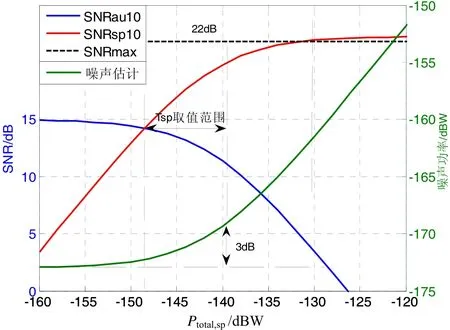
图3 Ptotal,sp取值范围Fig.3 Value range of Ptotal,sp
在欺骗信号成功实现对接收机的牵引,使得接收机跟踪上真实信号时,需要将欺骗信号功率降低到真实信号的功率水平,同时满足3个条件:①欺骗信号信噪比高于真实信号信噪比;②欺骗信号信噪比不超过最大信噪比(22 dB);③噪声基底抬高不超过3 dB。最后得出欺骗信号总功率取值范围(如图3)。
2.3 不同仰角的支路信号功率的分配策略
不同仰角的真实卫星信号功率是不同的。一般来讲仰角越低的信号,强度越弱。如果各路欺骗信号功率均相同,从同一天线进行发射,接收机接收到的欺骗信号功率也是相同的,因此不能不加区分地对各路欺骗信号采样同一功率进行发射。
欺骗信号总功率取值范围确定后,需要对不同仰角的卫星信号采用不同的功率进行发射。卫星总数为N,每颗卫星信号的平均功率为Pav,则N颗卫星的功率分配必须满足以下三个条件:①欺骗信号总功率在相应取值范围内;②欺骗信号总功率确定后,每路欺骗信号最小信噪比高于真实信号平均信噪比;③欺骗信号最大信噪比低于真实卫星信号最大信噪比。
满足此范围的仿真曲线如图4所示。

图4 单路欺骗信号功率取值范围Fig.4 Value range of single-way spoofing signal power
在Ptotal,sp确定后,可求出满足以上条件的欺骗功率(单路)范围[Pmin,Pmax],其中Pmin(对应真实信号平均功率)为欺骗信号最小功率,Pmax为欺骗信号最大功率(等于Ptotal,sp对应的噪声功率加上22 dBW),Ptotal,sp确定后对应的均值Pav也便确定。然后对N路欺骗信号进行功率分配。以欺骗位置为参考点得到各路欺骗信号的仰角,将N颗卫星仰角按从小到大顺序进行排序(S1, S2, S3,…, SN),对应的功率为(P1, P2, P3, …, PN)。
定义参量Pav1和Pav2:

设有未知量n(n颗卫星参量在[Pmin, Pav]范围内取值),列出方程:

解出:

由于n必须是整数,因此这里需要对解得的n进行取整运算。(P1, P2, …, Pn)在[Pmin, Pav]上服从均匀分布,(Pn+1, Pn+2, …, PN)在[Pav, Pmax]上服从均匀分布。
3 实验验证
利用软件接收机平台,验证欺骗信号对噪声基底的影响。为了控制变量,仿真信号采用模拟产生的GPS信号,将真实信号进行一定的延时后作为欺骗信号叠加到真实信号中,然后输入软件接收机,通过改变欺骗信号功率,观察记录噪声基底的变化情况。输入信号中含十路欺骗信号和十路真实信号(平均功率为-158 dBW),软件接收机相干积分时间为1 ms,N0为-204 dBW。

图5 噪声基底随欺骗/真实信号信噪比变化趋势Fig.5 Noise floor vs. SNR of spoof/authentic signals
由图5可知,在SP/AU(欺骗/真实信号)信噪比小于0 dB时,噪声基底基本不变;当SP/AU为4 dB并继续增大时,噪声基底迅速抬升。
假设十路信号平均功率为-158 dBW,十路信号按仰角从小到大分配功率,服从范围为[-163 dBW,-153 dBW]的均匀分布。此时欺骗信号总功率Ptotal,sp取-140 dBW,对应的欺骗信号平均功率Pav为-150 dBW,噪声水平为-170 dBW,则按上部分欺骗功率控制模型可以解得:Pmin=-158 dBW,Pmax=(-170+22) dBW=-148 dBW。然后按两段均匀分布对各路欺骗信号进行分配。各路真实信号和欺骗信号的功率分配结果如图 6所示。

图6 欺骗和真实卫星信号的功率分配Fig.6 Power distribution of spoof and authentic signal
将此合成(欺骗+真实)信号输入软件接收机得出实际噪声基底为-170.2 dBW,相比欺骗信号引入前升高了2.8 dB,欺骗信号最大信噪比为21.9 dB(小于22 dB),且每颗卫星的欺骗信号功率都高于相应真实信号功率3 dB以上。以2号星为例制出图7所示捕获三维图。

图7 捕获三维图(2号星)Fig.7 Three-dimensional diagram of Satellite 2
由图7可知,欺骗信号相关峰高于真实信号相关峰,可见欺骗信号成功对捕获环路进行了牵引,而不引起接收机噪声基底的明显抬高(3 dB以下),且各颗卫星信号的信噪比均在最大可能信噪比(22 dB)以下。当准确掌握接收机的参数信息时,可以通过改变约束量实现对接收机更加隐蔽地欺骗。
4 结 论
本文从信号传播损耗、信噪比约束以及不同仰角因素等层面详细分析了欺骗信号的功率控制策略,在实现对接收机捕获环路牵引的同时,保持实现对目标接收机实时欺骗,大大增强了欺骗干扰的隐蔽性。文中模型可行性强,得出的方法和结论对欺骗干扰机的研制具有重要的指导意义。
(References)
[1] Volpe J A. Vulnerability assessment of the transportation infrastructure relying on the Global positioning system [R]. Washington, USA: National Transportation Systems Center, August 2001.
[2] Humphreys T E, Ledvina B M, Psiaki M L, et al. Assessing the spoofing threat: development of a portable GPS civilian spoofer[C]//ION GNSS 2008. Savannah, GA, USA, 2008: 1198-1209.
[3] Wesson K, Shepard D, Humphreys T. Straight talk on anti-spoofing: securing the future of PNT[J]. GPS World, 2012, 23(1): 32-39.
[4] Pozzobon O. Keeping the spoofs out: Signal authentication services for future GNSS[J]. Inside GNSS, 2011, 6(3): 48-55.
[5] Humphreys T E. Detection strategy for cryptographic GNSS anti-spoofing[J]. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(2): 1073-1090.
[6] Jafarnia-Jahromi A, Lin T, Broumandan A, et al. Detection and mitigation of spoofing attacks on a vector based tracking GPS receiver[C]//Proceedings of the Inter national Technical Meeting of The Institute of Navigation. Newport Beach, CA, United states. 2012: 790-800.
[7] Montgomery P Y, Humphreys T E, Ledvina B M. Receiver-autonomous spoofing detection: Experimental results of a multi-antenna receiver defense against a portable civil GPS spoofer[C]//Proceedings of the ION International Technical Meeting. Anaheim, CA, USA, 2009: 124-130.
[8] 黄龙, 唐小妹, 王飞雪. 卫星导航接收机抗欺骗干扰方法研究[J]. 武汉大学学报信息科学版, 2011, 36(11): 1344-1347. Huang L, Tang X, Wang F. Anti-spoofing techniques for GNSS receiver[J]. Geomatics and Information Science of Wuhan University, 2011, 36(11): 1344-1347.
[9] 黄龙, 龚航, 朱祥维, 等. 针对GNSS授时接收机的转发式欺骗干扰技术研究[J]. 国防科技大学学报, 2013, 35(4): 93-96. Hung Long, Gong Hang, Zhu Xiang-wei, et al. Research of re-radiating spoofing technique to GNSS timing receiver[J]. Journal Of National University of Defense Technology, 2013, 35(4): 93-96.
Spoofing power control strategy for GNSS receiver
HU Yan-feng, BIAN Shao-feng, CAO Ke-jin, FENG Guo-li
(Department of Navigation Engineering, Naval University of Engineering, Wuhan 430033, China)
In order to maintain spoofing on the target receiver in real-time, a power control strategy was achieved based on quantitative analyses on signal propagation loss, noise level, and elevation factor. With this strategy and by real-time adjusting the total spoofing power and the power of each branch signal, the noise floor and the maximum spoofing SNR can be restricted to a limited range. Simulations verify the effectiveness and sustainability of maintaining deception, with the noise floor and the maximum spoofing SNR being limited to within 3 dB and 22 dB, respectively. This strategy is feasible and helpful for the development of GNSS spoofer.
GNSS receiver; spoofing interference; power control; propagation loss; noise level
TN914.42
A
1005-6734(2015)02-0207-04
10.13695/j.cnki.12-1222/o3.2015.02.013
2014-11-28;
2015-03-24
国家自然科学基金面上项目(41274013,41471387)
胡彦逢(1990—),男,博士研究生,主要研究方向为卫星无线电导航技术及应用。E-mail:daohang_yanfeng@163.com
联 系 人:边少锋(1961—),男,教授,博士生导师。Email:sfbian@sina.com
