高精度惯性平台十六位置自标定方案
2015-06-05孟卫锋袁爱红贾天龙江一夫
孟卫锋,袁爱红,贾天龙,江一夫
(1. 航天时代电子公司第16研究所,西安 710100;2. 解放军边防学院司令部工作教研室,西安 710108)
高精度惯性平台十六位置自标定方案
孟卫锋1,袁爱红1,贾天龙2,江一夫1
(1. 航天时代电子公司第16研究所,西安 710100;2. 解放军边防学院司令部工作教研室,西安 710108)
针对惯性平台系统多位置自标定的误差系数个数还较少的现状,提出了一种平台十六位置自标定方案。通过对惯性平台系统惯性器件输出误差模型和惯性器件安装误差的详细分析,推导出了包含51项误差参数的平台系统误差模型。结合方程组有最小二乘解的理论,提出了适合平台多位置自标定系统的可观测性分析方法,并以此为指导,提出了平台多位置自标定系统的优化指标。根据此指标,结合平台信息矩阵的特点,得到了一种最优位置组合的数值搜索算法,并得到十六位置自标定方案。仿真结果显示,此十六位置自标定方案可以较高精度的估计出平台系统的全部51项误差参数。研究结果表明,用尽可能少的位置来高精度的辨识出尽可能多的平台误差参数是可实现的。
惯性平台;自标定;最小二乘;最优位置
制导工具误差和方法误差是影响导弹命中精度的主要因素,前者占主要成份。而惯性仪表的精度在很大程度上决定了惯性平台系统的使用精度,因此在使用时必须进行补偿。对于高精度惯性平台,对误差进行标定并进行补偿就显得更为重要[1]。目前,对惯性平台系统误差模型的研究多数停留在对陀螺仪和加速度计误差系数的模型上,而对加速度计和陀螺仪的安装误差考虑的较少,而这些安装误差如果得不到补偿,将会对惯性平台系统的精度产生较大影响[2]。文献[3]讨论了一种可以标定54项误差系数的多位置自标定方法,但未涉及加速度计和陀螺仪的安装误差。文献[2][4-8]虽然给出了陀螺仪和加速度计安装误差的标定方案,但未能标定陀螺仪全部的二次项误差系数和加速度计的二次误差系数,也就是标定的误差系数不够多。同时,位置的选择是惯性平台多位置自标定的决定性因素,因为位置组合的选择影响误差系数标定的个数和精度[2]。然而位置组合的选择又是一个很困难的非线性优化问题,研究位置选择的还比较少,甚至是回避此问题,位置选择主要依靠工程经验[2]。论文[2]虽然给出了一种最优多位置组合的实验方法,分析了位置选择对自标定精度的影响,但这种最优只是在选用的指标是使信息矩阵的行列式达到最大时才有效;对于最小二乘估计,选择条件数最小作为优化指标更为合理。
本文首先从惯性平台的结构出发,推导出完整的惯性平台系统误差模型。在此基础上分析了系统观测矩阵和信息矩阵的特征,通过使观测矩阵的条件数最小这一优化指标得出最佳位置组合选择算法,并在此算法基础上得出基于本论文误差模型的最佳16位置。将此16位置应用到平台系统自标定中,并对仿真结果做简要分析。
1 惯性平台结构与平台误差模型
本文研究的惯性平台由三个单自由度液浮陀螺仪、三个挠性摆性加速度计组成。三个陀螺和三个加速度计的敏感轴正交安装,分别沿X、Y、Z方向。陀螺仪、加速度计在平台上的安装示意图如图1。
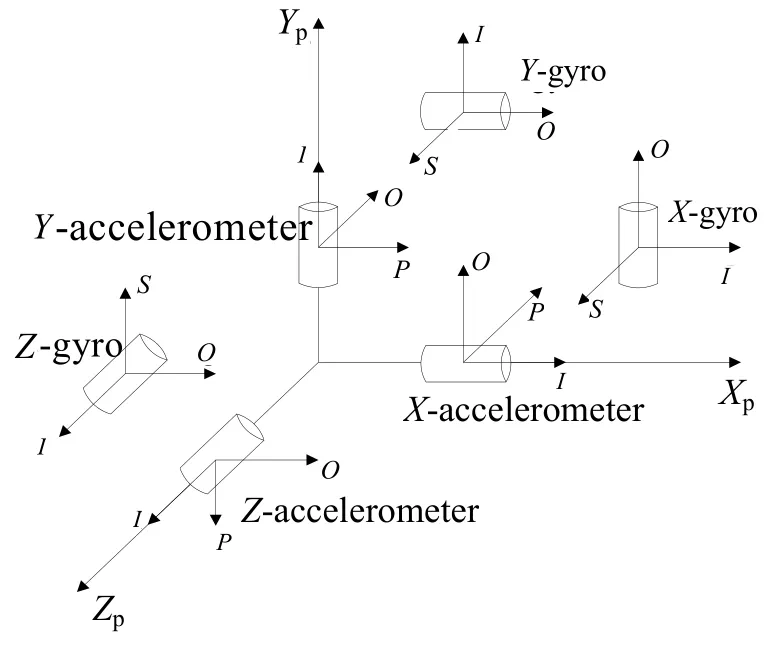
图1 平台组成图Fig.1 Platform geometry
设陀螺仪i轴绕其o、s轴的安装误差为Δoi、Δsi,加速度计i轴绕其p、o轴的安装误差为θpi、θoi,i=x,y,z。
陀螺仪静态误差模型[10]:

式中:kg0是陀螺仪常值漂移,kg1i(i=1,2,3)是陀螺仪一次项误差系数,kg2i(i=1,2,3,4)是陀螺仪二次项误差系数;ai、ao和as分别表示陀螺仪输入轴、输出轴和自旋轴上的比力。
加速度计输出误差[10]:

式中:ka0是加速度计零偏,ka11是加速度计比例误差系数,ka2i(i=1,2,3)是陀螺仪二次项误差系数;ai、ao和ap分别表示陀螺仪输入轴、输出轴和自摆轴上的比力。
设陀螺仪 i 轴绕其o、s 轴的安装误差为Δoi、Δsi,加速度计 i 轴绕其p、o 轴的安装误差为θpi、θoi,i=x,y,z。假定这六个安装误差均为小角度。陀螺仪和加速度计的安装误差分别如图2和图3所示。
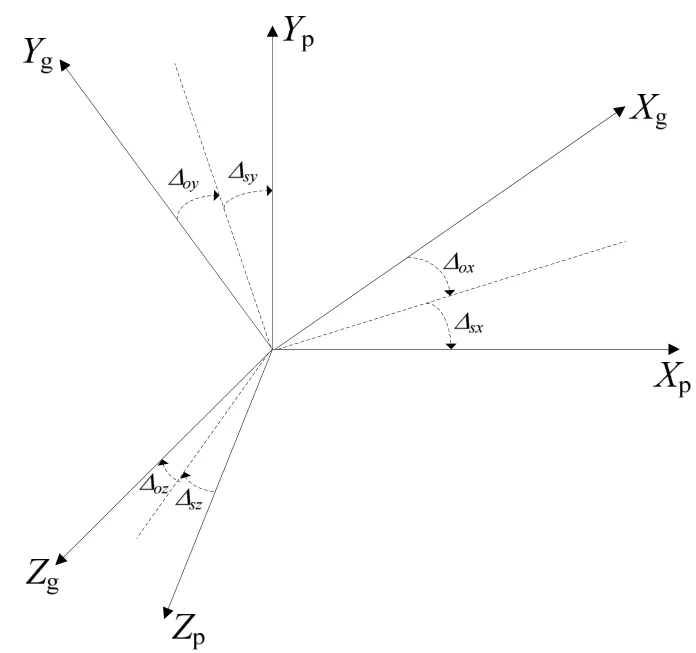
图2 陀螺仪安装误差Fig.2 Gyro-platform geometry
结合图1和图2可得,平台坐标系p到X、Y、Z陀螺仪坐标系的变换矩阵为:
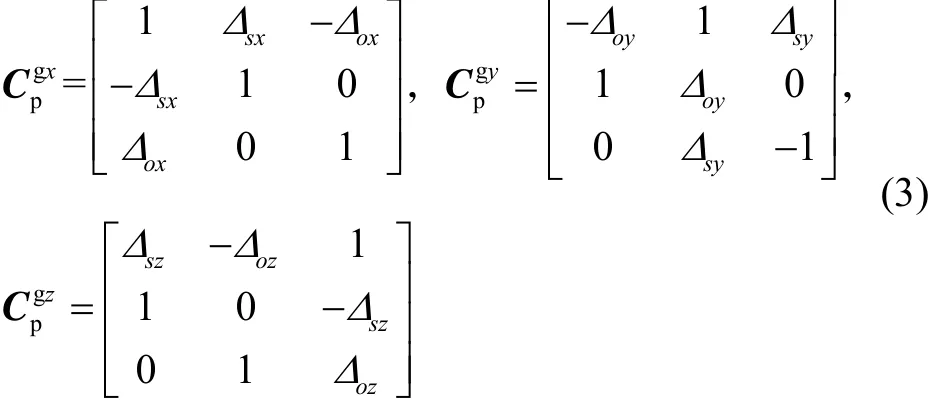
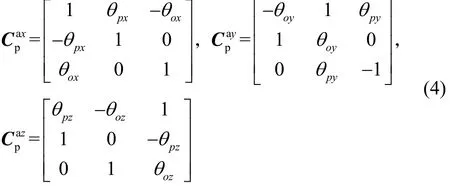
同理,平台坐标系p到X、Y、Z加速度计坐标系的变换矩阵为:
如果在翻滚实验中先绕台体轴旋转,再绕外环轴转,转动角度分别是α和γ,则地理坐标系n到平台坐标系p的转换矩阵为(假设地理坐标系n为东北天坐标系):
考虑上文定义的安装误差后,将式(3)~ (5)代入式(1)和(2),得陀螺仪和加速度计的误差模型分别为:
式中:g0为当地重力加速度,本文取值为9.794 m/s2;λ0为当地纬度,本文取值为34°10′36.1′,ωie为地球自转角速度,本文取值为7.292×10-5rad/s。上述误差模型中一共有51个待估参数,其中,陀螺仪仪误差系数共8×3=24个,加速度计误差系数5×3=15个,陀螺仪安装误差2×3=6个,加速度计安装误差2×3=6个。由于待估参数较多,需要更多的位置才有可能得到较高的估计精度,而同时希望标定时间越短越好。综合考虑这两方面因素,作者选用十六位置自标定方案。在下一小节将深入探讨如何选择最优的十六位置组合。
2 最优位置选择
在多位置标定中,位置的选择决定了估计误差系数的个数以及估计精度,因此选择多少位置以及选择什么样的位置组合是非常重要的一点。工程经验位置组合无法标定加速度计的二次项误差系数。研究位置选择实际上是研究系统的可观测性和可观测度,也就是说系统可观测,所有的误差系数就能估计出。而某个参数的可观测度大小决定了估计的精度,观测度越高,估计精度越高,观测度越小,估计精度越差。本文中参数估计问题实际上是一个最小二乘估计问题,其数学模型为[9]:

式中:Z为观测向量,在本文中就是不同位置出陀螺仪和加速度计的输出组成的列向量;H为量测矩阵,在本文中就是待估参数的系数组成的矩阵;X为状态变量,在本文就是待估误差和相关安装误差组成的列向量;ε为系统量测噪声,本文设为零均值高斯白噪声。式(8)的最小二乘解即为状态变量X的最小二乘估计。
为了方便描述,给出信息矩阵的定义如下式:

由最小二乘估计的形式可以看出,当M满秩,也就是可逆时,此时状态变量 的所有分量才能得到估计,也就是系统完全可观测;同时根据最小二乘估计理论知道,对于最小二乘问题(如式(8)),当信息矩阵M某一特征值较小时,信息矩阵的条件数很大,此时最小二乘估计精度很差。矩阵的条件数定义为:

式中:λ1、λn分别表示量测矩阵H的最大和最小奇异值。以X轴陀螺仪为例,若采用16位置,H的形式为:

将式(11)代入式(9)得M的具体形式为:

其中:

式中:i=1,2,…,16。从式(9)(11)(12)可以看出,信息矩阵M的形式非常复杂,包含了32个变量(16个αi,16个γi),用拉格朗日极值等解析的方法去分析信息矩阵M的秩和特征值以及矩阵H的条件数是极其困难的,因此需要转变解决思路。
事实上,很多时候,工程应用中都是回避此问题的理论性研究,位置组合多数靠经验来选择[2],也就是试凑法,但是这种经验位置估计的参数个数非常有限,这与标定更多的误差系数是相违背的。而也有学者试图研究最优位置组合的选择算法,如文献[2]中给出了最优位置组合的选择算法,但这种最优是在给定的28个位置中挑选出一个最优的16位置组合。显然这种最优有很大的局限性,因为这并没有彻底的解决最优位置的选择问题;同时这种位置组合也仅仅估计出35项误差系数,与高精度惯性平台的要求还有一定距离。因此,寻找一种开创性、指导性、通用性的位置组合的选择算法显得极为迫切和重要。
但经验也有启示的作用,根据以往的选择位置经验,一般相邻的α和γ之间相隔固定的角度[10](一般为45°或者90°)。在这种经验的启示下,我们只需要起始位置(α1,β1)和相邻α和γ的间隔(Δα,Δγ),便可确定剩余的15个位置,这也就说将信息矩阵M和量测矩阵H的变量从32个减小到4个:α1、γ1、Δα、Δγ,其中,Δα和Δγ分别表示相邻两个α和γ之间相差的角度。此时的16位置模型如表1。
表1 16位置模型Tab.1 Model of 16 positions
在解析法非常困难时,作者选择了数值方法,利用计算机计算出所有位置处的信息矩阵M和量测矩阵H,然后挑选出符合优化指标的最优位置组合,也就是利用仿真软件仿真出最优位置组合。经过以上分析,最优位置组合的挑选算法如下描述:
① 设置α和γ步长,在这里选择相等的步长3°(当然也可以选择其他的步长,甚至α和γ步长的步长不相等),且α、γ∈[0°,180°],设置Δα和Δγ的值,如依次取Δα=30°、45°、60°、90°,Δγ=30°、45°、60°、90°依次计算出不同位置处的量测矩阵H和信息矩阵M;
② 计算每一个M的秩和H的条件数并记录下标;
③ 选出矩阵M的秩为10(X轴陀螺仪待估参数个数)并且H条件数最小的下标;
④ 根据下标计算出(α1,γ1)和(Δα,Δγ),并依此确定出其他15个位置。
根据以上算法即可数值仿真出最佳的十六位置组合(步长为3°),具体见表2。
在仿真过程中发现:① 应避开90°整倍数角度位置;② 尽量避开α=γ的位置。因为这两种情况均会使信息矩阵M的秩小于10(X轴陀螺仪待估参数个数)。
虽然上述位置只是以X轴陀螺仪为例是最佳位置,但是相对其他轴陀螺仪和加速度计也是最优位置,因为虽然它们的H不同,但只是交换了列的顺序。由矩阵论知识可知,这种变换并不改变矩阵的奇异值,也就不会改变矩阵的条件数。

表2 最佳16位置Tab.2 Optimal 16 positions
3 误差系数标定
在第1节中推导了完整的误差模型,第2节给出了最佳十六位置组合,则误差系数标定的仿真也就水到渠成了。误差系数仿真真值设置如表3。

表3 仿真真值Tab.3 True values of simulation
表3中陀螺仪误差系数kg0i(i=x,y,z)的单位为(°)/h,kgij(i=1,2,3,j=x,y,z)的单位为((°)·h-1)/g2,kg2ij(i=1,2,3,4,j=x,y,z)的单位为(″),Δij(i=s,o,j=x,y,z)的单位为(″);加速度计误差系数ka0i(i=x,y,z)的单位为0.001 m/s2,ka11i(i=x,y,z)的单位为0.001 m/(s2·g),ka2ij(i=1,2,3,j=x,y,z)的单位为0.001 m/(s2·g2),ka3i(i=x,y,z)的单位为0.0001 m/(s2·g3),θij(i=p,o,j=x,y,z)的单位为(″)。陀螺仪漂移随机误差标准差为0.001 (°)/h,加速度计测量随机误差标准差为1×10-6m/s2。
在表1所列位置组合下,各陀螺仪及加速度计的各项误差将相继受到重力加速度和地球自转角速度的激励。定义相对误差:

式中:μ为真值,μ为估计值。
在给定的标定方案下,平台51项误差系数的标定结果见表4。
从表4可以看出:陀螺仪误差系数估计相对误差最大为0.7%,估计精度比较高,而安装误差估计相对误差最大达到21.5%,估计精度较差;加速度计误差系数估计相对误差最大为0.68%,估计精度较高。陀螺仪安装误差估计精度较低的主要原因在于其激励是地球自转角速度,而地球自转角速度相对于重力加速度而言非常小,这使得陀螺仪安装误差的可观测性较差,导致其估计效果不佳。
4 结 论
本文首先推导了较为完整的惯性平台系统的误差模型,包含误差系数及安装误差共51项,在此基础上给出了基于条件数最优的16个位置组合的选择算法,并仿真得到最优的16个位置。文中所提算法意义简单明了,充分展示了数值方法的魅力,在解析法很困难的时候,数值方法往往能让问题得到大大的简化。同时这一选择算法具有一般性,可以用在惯性平台其他多位置自标定以及相关最小二乘估计问题中。自标定仿真结果显示误差模型中的51项误差系数都能被估计出,而且估计精度非常理想,再次说明本文得到的16个位置非常理想。研究结果表明采用尽可能少的位置高精度的辨识出尽可能多的惯性平台误差系数是可能的。
(References):
[1] Seong-hoon P W, Farid G. A triaxial accelerometer calibration method using a mathematical model[J]. IEEE Trans. on Instrumentation and Measurement, 2010, 59(8): 2144-2152.
[2] 包为民, 申功勋, 李华滨, 等. 惯性平台在系统中多位置翻滚自标定方法[J]. 北京航空航天大学学报, 2011, 37(4): 462-465. Bao Wei-min, Shen Gong-xun, Li Hua-bin, et al. Investigation on inertial platform multi-position rolling selfcalibration[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(4): 462-465.
[3] 刘西河, 宋有山. 任意初始位置平台误差模型自标定[J].中国惯性技术学报, 1994, 2(1): 30-34. Liu Xi-he, Song You-shan. Automatically calibrating the error of platform with arbitrary inertial orientation[J]. Journal of Chinese Inertial Technology, 1994, 2(1): 30-34.
[4] Zhang H L, Wu Y X, Wu W Q, et al. Improved multiposition calibration for inertial measurement units[J]. Measurement Science and Technology, 2010, 21(1): 151-158.
[5] Cao Y, Cai H, Zhang S F, et al. A new continuous self-calibration scheme for a gimbaled inertial measurement unit[J]. Meas. Sci. Technol., 2012, 23(1): 151-154.
[6] 孙枫, 曹通. 基于Kalman滤波的加速度计十位置标定方法[J]. 系统工程与电子技术, 2011, 33(10): 2272-2276. Sun Feng, Cao Tong. Ten-position calibration for accelerometer based on Kalman filter[J]. Systems Engineering and Electronics, 2011, 33(10): 2272-2276.
[7] Fong W T, Ong S K, Nee A Y C, et al. Methods for infield user calibration of an inertial measurement unit without external equipment[J]. Meas. Sci. Technol., 2008, 19(7): 1-11.
[8] 曹渊, 张士峰, 杨华波, 等. 惯导平台误差快速自标定方法研究[J]. 宇航学报, 2011, 32(6): 1281-1287 . Cao Yuan, Zhang Shi-feng, Yang Hua-bo, et al. Research on rapid self-calibration method for inertial platform[J]. Journal of Astronautics, 2011, 32(6): 1281-1287.
[9] Dan S. Optimal state estimation-Kalman, H∞and nonlinear approaches[M]. John Wiley & Sons, 2006 : 79-102.
16-position self-calibration of high-accuracy inertial platform
MENG Wei-feng1, YUAN Ai-hong1, JIA Tian-long2, JIANG Yi-fu1
(1. Institute No.16 of China Aerospace Times Electronics Corporation, Xi’an 710100, China; 2. Operation Room in Command Centre of Xi’an Army Academy, Xi’an 710108, China)
A 16-position self-calibration scheme for inertial platform is proposed to solve the problem that only few error coefficients of the inertial platform can be estimated by the present multi-position self-calibration method. Combining with the output error model and installation error of the inertial device, an error model of the inertial platform with includes 51 error coefficients is deduced. An appropriate observability analysis for the inertial platform self-calibrated system is proposed, and then the optimization criterion of the inertial platform self-calibrated system is given. According to this criterion and combining with the characteristic of the platform system’s information matrix, an optimal position combination numerical searching algorithm is proposed, and a 16-position self-calibration scheme is obtained. The simulation results prove that this 16-position self-calibration scheme can estimate all the 51 error parameters of the inertial platform with high precision, showing that the number of positions can be as less as possible in identifying the error parameters of inertial platform with high precision.
inertial platform; self-calibration; least-square; optimal position
V441
A
1005-6734(2015)02-0150-06
10.13695/j.cnki.12-1222/o3.2015.02.003
2014-11-25;
2015-01-23
总装预研基金(51309040501);第二炮兵武器装备预研项目(203010201)
孟卫锋(1972—),男,博士,研究员,主要从事导航与控制技术研究。E-mail:mwfwp@163.com
