双低通滤波器法改进电压型定子磁链观测器研究
2015-06-01操张鹏廖勇李福
操张鹏,廖勇,李福
(重庆大学输配电装备及系统安全与新技术国家重点实验室,重庆400044)
双低通滤波器法改进电压型定子磁链观测器研究
操张鹏,廖勇,李福
(重庆大学输配电装备及系统安全与新技术国家重点实验室,重庆400044)
针对低通滤波器法电压型定子磁链观测模型所存在的零漂问题,提出了双低通滤波器代替纯积分求解定子磁链的新方法,该方法采用两个不同截止频率和比例系数的低通滤波器,对输入反电势滤波后相减消除零漂。从理论上证明了双低通滤波器法定子磁链观测器能够完全消除直流偏置。根据滤波器的特点,提出了幅值和相位的补偿方法,进一步分析了双低通滤波器中参数的选择对其磁链观测的影响。仿真和实验验证了该磁链观测器的正确性和有效性。
磁链观测;直流偏置;双低通滤波器;误差补偿
1 引言
近年来,交流电机直接转矩控制技术发展迅猛,在直接转矩控制技术中,定子磁链观测是其中的重要环节。目前定子磁链观测有三种方法:电压电流模型、电流速度模型和电压速度模型。电压电流模型只需定子电阻,结构简单,因此得到了广泛应用。电流速度模型严重依赖电机参数且需要精确的转速信息。电压速度模型是前两种模型的综合,实现复杂且存在切换抖动问题。电压电流模型存在纯积分环节,由于积分器存在零漂会引起直流偏置和积分饱和的问题,使其在实际系统中的应用受到极大的限制。
为了解决上述问题,文献[1,2]提出了根据定子频率调整其增益和相位的改进低通滤波器磁链观测器,通过选择合适的截止频率使磁链观测器具有较好的直流漂移抑制能力,但也不能完全消除直流偏置。文献[3]提出了一种无积分器电压型磁链模型,该方法可以很大程度地减弱直流漂移问题,但该方法需要精确的定子频率信息才能实现。文献[4]对上述方法进行了直流漂移前馈补偿改进,完全消除了直流漂移问题,但仍然需要精确的定子频率信息,实际系统中难以精确测量。
本文首先分析了电压型磁链观测器实际应用中存在的问题,并探讨了一般改进低通滤波器法无法完全消除直流偏置的原因,在此基础上提出了可以消除直流偏置的双低通滤波器法定子磁链观测器,该方法能够完全消除积分初值和零漂对磁链观测的影响,并通过对其观测的定子磁链进行幅值和相位补偿,可以使观测的定子磁链的幅值和相位更准确。
2 电压型定子磁链观测模型研究分析
2.1 电压型定子磁链观测模型
基于感应电机电压方程在两相静止α-β坐标系下定子磁链表达式为[5]:
式中,ψsα、ψsβ、usα、usβ和isα、isβ分别是定子磁链、相电压和相电流在α-β坐标系下的分量;Rs为定子电阻。
2.2 纯积分环节存在的问题
定子电流通过采样电路获得,由于采样电路的非理想,使得采样结果存在零漂。当定子电流中存在零漂时,电动势中将存在直流误差分量。由式(1)可以看出直流误差分量将会对电压型磁链观测器产生严重影响,因为很小的直流误差经过纯积分作用都会导致定子磁链计算出现积分饱和,而且积分初值也会给磁链结果带来直流偏置。因此,零漂和积分初值会使磁链观测结果严重畸变。
3 双低通滤波器法电压型定子磁链观测器的原理
3.1 消除直流偏置的原理
纯积分环节为:

假设输入量

式中,ωe为电机的电源角频率;B为零漂。将输入量式(3)代入式(2)并离散化得:
式中,Ts为采样周期;当k=1时,y(0)=y0,y0为积分初值。
从式(4)可以看出,纯积分环节中零漂B会随着时间不断累积。若积分初值y0存在误差,则输出会存在直流偏置量,即会出现输出正负半周不对称现象[6]。
一般改进定子磁链观测器多采用LPF法,其原理为:

式中,ωc为截止频率。将式(5)离散化,得:

令

将式(7)代入式(6),得:
再将输入量式(3)代入式(8)得:


显然λ2<1,当k→∞时,即系统稳态时,式(9)可简化为:

由式(10)可以看出,虽然LPF法可以消除积分初值的影响,但不能完全消除零漂的影响,只能减小零漂的影响。截止频率ωc越大,输出直流偏置越小。但截止频率ωc过大,输出幅值和相位偏差过大,系统的稳定性变差[7]。
本文提出一种新的双低通滤波器法定子磁链观测器,简称双低通法。基本思路是通过两个不同截止频率和比例系数的低通滤波器对输入滤波后相减,从而完全消除零漂和积分初值的影响。双低通滤波器表达式如下:

式中,a、b和λ为常数。为使双低通滤波器输出的幅值和相位偏移较小,便于补偿计算,令λa-λb= 1。
下面推导双低通滤波器可以消除直流偏置的原理。将式(11)离散化,并将输入量式(3)和λa-λb =1代入,当k→∞时,即系统稳态时,可化简得:

由式(12)可以看出本文提出的双低通法不仅可以消除积分初值的影响,也可消除零漂带来的影响,解决了定子磁链观测器存在的直流偏置问题。
3.2 幅值和相位补偿
由上述推导可知双低通法可以消除积分初值和零漂的影响,但滤波器也带来了幅值衰减和相位偏移的问题,因此需要对其进行补偿。
电压型定子磁链模型在频域表达式为:

式中,ψs为定子磁链矢量;Us为电压矢量;Is为电流矢量。
由式(11)可得双低通法定子磁链观测器模型为:

由式(13)和式(14)可得:
在两相静止α-β坐标系下,定子磁链为:

由于这里ψsα、ψsβ、ψ'sα、ψ'sβ'都是时间向量,且在定子磁链逆时针旋转时,定子磁链先经过α轴后经过β轴,因此在时间坐标系中,ψsα、ψ'sα分别领先ψsβ、ψ'sβπ/2电角度。所以ψ'sα、ψ'sβ是同幅值不同相位的时间向量,且满足如下关系[8]:

将式(17)代入式(16),即可得到补偿表达式如下:

综上所述,可得带补偿环节的双低通滤波器法定子磁链观测器模型框图如图1所示。可以看出该模型不仅概念清晰,而且结构简单,易于在数字系统中实现。

图1 双低通滤波器法定子磁链观测器框图(λa-λb=1)Fig.1 Block diagram of stator flux observer by double-LPF
3.3 双低通滤波器参数对磁链观测的影响
由于λa-λb=1,因此当a、b确定后,λ也就确定了,所以实际双低通滤波器中只有a、b和ωe三个参数。
从3.1节分析可知双低通滤波器通过两个不同的截止频率和比例系数的低通滤波器,使得两个低通滤波器对直流信号的稳态抑制效果相同,然后使两个滤波器相减从而完全消除直流信号的影响。对于低通滤波器,截止频率越大,其对直流误差的抑制不仅越大且越快。同理,双低通滤波器中的截止频率越大,其对直流信号的抑制也越快。在相同的ωe的情况下,截止频率由参数a、b决定,因此参数a、b越大,双低通滤波器对直流信号的抑制会越快。
因为在实际系统中电机电源角频率ωe一般无法准确得到,而3.2节的幅值和相位补偿的推导是在ωe无误差的条件下推导出来的。因此实际系统中双低通滤波器的观测磁链将会因为ωe存在误差而出现误差。当考虑ωe存在x倍误差时,由式(13)~式(15)可得观测到的磁链结果为:

此时观测到的磁链的幅值和相角误差如下:

可得此时幅值和相角误差的百分比为:

当x=0.1,0.2时,即电机电源角频率ωe存在10%、20%的误差时,通过Matlab计算出此时观测到的磁链幅值和相角误差百分比如图2所示,其中0.1≤a,b≤0.3。当x=-0.1、-0.2时磁链误差绝对值范围与x=0.1、0.2基本相当。由图2可以看出,当ωe存在误差时,观测磁链将存在误差,误差大小随参数a、b增大而增大,因此参数a、b选择不宜过大。由图2(a)可以看出ωe存在10%误差时,磁链误差不超过2%,并且选择合适的参数a、b可以使磁链误差更小。这说明本文提出的双低通法磁链观测器,只需要获得较为精确的ωe的信息就可以获得很高精度的磁链观测结果,即对ωe的精度要求不高。通过仿真和实验得出参数a、b取值在0.1~0.3范围内较为合适。

图2 ωe存在误差时磁链幅值和相角误差Fig.2 Error of flux amplitude and angle with error inωe
4 仿真结果
本文首先在理想情况下,对双低通滤波器和LPF算法进行了仿真比较。仿真中LPF算法的截止频率设为4rad/s。
为考虑反电势突变对磁链观测的动态影响,本节仿真的输入反电势信号在2s时刻幅值和频率由31.415V、5Hz突变为原来的一半。且仿真过程中输入反电势在α-β轴分量一直存在0.2V的直流误差量。仿真结果如图3~图5所示。
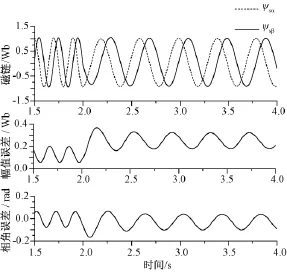
图3 LPF法磁链观测结果Fig.3 Flux observation by LPF
从图3可以看出,采用LPF法观测到的定子磁链存在直流偏置,磁链幅值和相位误差较大。且当反电势频率减小时,由于其截止频率不变,输出磁链中直流偏置大小不变,但截止频率与反电势频率之比增大使得观测磁链的幅值和相位偏差增大。
从图4可以看出,双低通法磁链观测器很好地
消除了直流偏差和积分初值带来的直流偏置,补偿后幅值和相位误差都约等于0。当输入反电势突变时,双低通法输出磁链存在一个动态过程,但动态过程中磁链误差很小。双低通法在输入反电势突变时存在一个动态过程是因为输入反电势频率发生了突变,导致双低通滤波器中截止频率发生了变化。由式(10)可知,截止频率的变化将使低通滤波器对直流信号的抑制发生变化,这种变化存在一个动态过程。从3.3节的分析可知截止频率越大低通滤波器对直流信号的动态过程越快,即双低通滤波器参数a、b越大,动态过程越快。对比图4和图5可以看出,图4的动态响应更快。
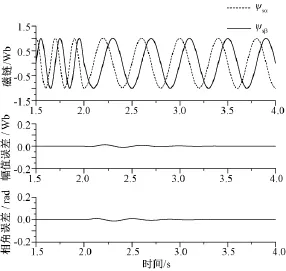
图4 双低通法磁链观测结果(a=0.3,b=0.2,λ=10)Fig.4 Flux observation by double-LPF

图5 双低通法磁链观测结果(a=0.25,b=0.15,λ=10)Fig.5 Flux observation by double-LPF
5 实验结果
为了进一步验证本文提出的磁链观测方法的有效性,本文在dSPACE DS1103的平台下,建立了感应电机开环变压变频调速和基于双低通法定子磁链观测的转速闭环直接转矩控制硬件实验系统。直接转矩控制框图如图6所示。实验所用电机参数如下:额定频率为50Hz;额定功率为180W;额定转速为1320r/min;额定电压为380V;额定电流0.58A;联结方式为Y;额定转矩为9N·m;极对数为2;定子相电阻60Ω。
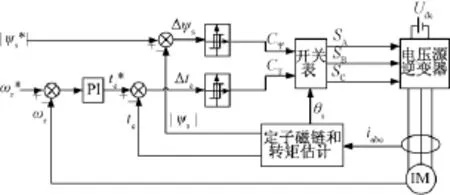
图6 感应电机直接转矩控制框图Fig.6 Block diagram of direct torque control of inductionmotor
实验首先在开环变压变频调速系统中分别应用双低通法和LPF法进行磁链观测。实验中电机的相电压给定值为30V,频率给定值为5Hz。实验时测得电机转速为140r/min。LPF法其截止频率为8rad/s,双低通法参数为a=0.3,b=0.2,λ=10。当电机稳定运行时,观测结果如图7所示。从图7(a)可以看出,由于实验系统采样电流中存在零漂,LPF法磁链观测结果中存在严重的直流偏置(本文实验所用的感应电机定子电阻较大,实验中反电势存在较大的直流误差量)。本文提出的双低通法磁链观测结果如图7(b)所示,磁链观测结果中几乎没有直流分量。

图7 开环定子磁链观测对比实验结果Fig.7 Contrast experiment results of open loop of stator flux observation
闭环实验时,直接转矩控制系统中定子磁链观测分别采用双低通法和LPF法。实验中除定子磁链观测方法不同,其他条件及参数均相同。实验系统控制周期及采样周期均为100μs,逆变器直流侧电源电压100V,开关频率10kHz。
图8为采用不同定子磁链观测方法时,给定转速为150r/min时转速和定子电流的实验波形。对比图8(a)和图8(b)可知,由于磁链观测方法的不同,系统的运行性能存在明显差异。基于LPF法系统实验结果如图8(a)所示,其转速波动明显大于双低通法系统,电流波形也较差。而双低通法系统相对控制效果较好,图8(b)中可以看出其转速波动较小且电流波形也较好。

图8 转速闭环直接转矩控制对比实验结果Fig.8 Contrast experiment results of speed closed-loop direct torque control
本文还给出了基于双低通法直接转矩控制起动及调速时的实验波形,即动态过程的实验波形,如图9所示。可以看出,起动和调速过程都非常快,转速很快达到了给定值且超调量很小。起动和调速效果较好,说明了双低通法磁链观测器在动态过程中依然可以准确地观测磁链,满足系统的控制要求。
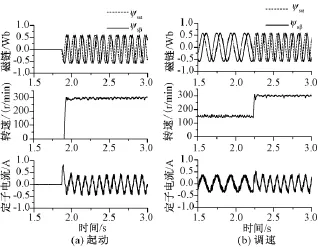
图9 基于双低通法直接转矩控制起动和调速实验波形Fig.9 Starting and speed regulation experimental waveforms of DTC based on double-LPF
6 结论
本文提出了一种新的定子磁链观测方法,即双低通滤波算法。该算法通过两个不同截止频率和比例系数的低通滤波器相减,可以完全消除直流漂移和积分初值对磁链观测的影响,且对其进行幅值和相位补偿后得到了幅值和相位精确的定子磁链。双低通滤波器法定子磁链观测器结构简单,计算量小,易于在工程应用中实现。最后本文通过仿真和实验验证了双低通滤波器法定子磁链观测器能够很好地消除直流漂移带来的影响,改善了异步电机直接转矩控制的运行性能。
[1]Li Yong,HuangWenxin,Hu Yuwen.A low cost implementation of stator-flux-oriented induction motor drive[A].Proceedings of the Eighth International Conference on Electrical Machines and Systems[C].Nanjing,China,2005.1534-1538.
[2]Idris N R N,Yatim A H M.An improved stator flux estimation in steady-state operation for direct torque control of inductionmachines[J].IEEE Transactions on Industry Applications,2002,38(1):110-116.
[3]Jaebok L S,Sathiakumar S,Shrivastava Y.A novel method to estimate speed for the induction motor at wide range speed[A].International Conference on Systems and Informatics(ICSAI)[C].Yantai,China,2012. 1265-1269.
[4]Jaebok L,Sathiakumar S,Shrivastava Y.A new integration method to estimate stator flux in induction motor with dc offset error[A].2013 IEEE TENCON Spring Conference[C].Sydney,Australia,2013.75-79.
[5]王成元,夏加宽,杨俊友,等(Wang Chengyuan,Xia Jiakuan,Yang Junyou,et al.).电机现代控制技术(Modern control technology for electrical machines)[M].北京:机械工业出版社(Beijing:China Machine Press),2008.
[6]李红,罗裕,韩邦成,等(Li Hong,Luo Yu,Han Bangcheng,et al.).带通滤波器法电压积分型定子磁链观测器(Voltage integralmodel for stator flux estimator based on band-pass filter)[J].电机与控制学报(Electric Machines and Control),2013,17(9):8-16.
[7]张旭,瞿文龙(Zhang Xu,Qu Wenlong).一种低速下磁链观测补偿的新方法(A new method of compensation under low-speed flux linkage)[J].电工电能新技术(Advanced Technology of Electrical Engineering and Energy),2003,22(3):50-54.
[8]X Zhang,W Qu,H Lu.A new integrator for voltage model flux estimation in a digital DTC system[A].TENCON 2006,2006 IEEERegion 10 Conference[C].Hong Kong,China,2006.1-4.
Im proved voltagemodel of stator flux observer based on double low-pass filters
CAO Zhang-peng,LIAO Yong,LIFu
(State Key Laboratory of Power Transmission Equipment&System Security and New Technology,Chongqing University,Chongqing 400044,China)
In view of the zero drift problem existing in the low-pass filtermethod of the voltagemodel of stator observer,a new method,in which double low-pass filters(double-LPF)with different cut-off frequencies and proportion coefficients are used to eliminate the zero drift influence by subtracting the output of the filters in the input electromotive force,is proposed so as to replace pure integration for solving the stator flux.The reason for improved performance is analyzed theoretically.According to the characteristics of the filters a method for compensation of amplitude and phase is proposed,and the influence of the parameters of double-LPF to flux observation is also analyzed.The validation and effectiveness of the new method are verified by simulations and experiments.
flux observer;direct current offset;double low-pass filters;error compensation
TM343
A
1003-3076(2015)03-0035-06
2014-09-29
操张鹏(1991-),男,安徽籍,硕士研究生,主要从事电机系统及其控制的研究;廖勇(1964-),男,重庆籍,教授,主要从事新型电机控制科研及教学工作。
