穿戴式导航传感器在步行康复训练监控中的应用
2015-05-06张剑锋周泽波
张剑锋,周泽波,2
穿戴式导航传感器在步行康复训练监控中的应用
张剑锋1,周泽波1,2
(1.电子科技大学 航空航天学院,成都 611731;2.中国科学院 测量与地球物理研究所,武汉 430077)
针对步行康复训练中的实时监控问题,开发了低成本导航传感器的硬件平台,设计了一种计算步行距离的零速修正算法,给出了本地坐标系下的导航解算公式,并论述了三组零速检测阈值联合判决条件。最后通过实验验证了本文所提出算法的正确性和实用性,可满足步行康复训练监控的应用需求。
步行康复训练;步行距离;导航传感器;零速修正
0 引言
受中枢神经系统受损导致的关节功能活动障碍,会不同程度的影响偏瘫病人的步行能力,如文献[1]所述,主要表现为无法步行或步态异常,严重影响病人的日常生活。不正确的康复训练方法不仅无法达到康复效果,还可能引发其他的并发症或加重异常运动模式。文献[2]论述,在步行康复训练中,监控并分析患者步距、步长和步速等信息对康复治疗师掌握病情有重要参考价值。患者的康复训练通常在室内进行,采用室内导航定位传感技术来获取相关状态信息。目前,无线定位(WIFI,蓝牙,ZigBee等)、射频识别(RFID)、计算机视觉等多种导航传感器已广泛应用于室内导航定位,文献[3]分别对各种室内定位技术进行了论述,但这些技术无法反应患者的详细步态信息。穿戴式传感器(以惯性器件为主)可提供更多的细节信息,因此是实现人体运动捕获与跟踪的主流方案,如文献[4]中介绍的多种利用惯性技术的运动捕获方案。文献[5]通过可穿戴传感器检测胫骨垂直状态,将行人的行进分为若干个单步,可以实现较大概率下得到较小的距离误差,但由于偏瘫病人的肢体大多呈现屈曲状态,即无法检测到胫骨垂直状态,故这种方法有一定局限性。文献[6]利用固定在脚上的惯性传感器实现行人导航,并设计了三个零速状态检测器,包括加速度方差检测,加速度能量检测和角速率幅值检测。文献[7]在此基础上,针对每一步行走的停顿设计算法对运算结果做平滑,虽然实时性略受影响,但导航结果更加连续和准确。
本文开发了一种低成本可穿戴的惯性传感器硬件平台。在此基础上,建立可穿戴传感器的导航数学模型,设计了一种适用于康复训练的零速修正(zero-velocity update,ZUPT)算法进行步速、姿态以及位置的实时修正。最后采用实验验证本文所开发穿戴式导航传感器可满足患者康复信息监控精度要求,为步行训练分析提供重要参考数据。
1 穿戴式硬件平台及导航数学模型
1.1 硬件平台
本文所开发的穿戴式硬件平台如图1所示。硬件平台由三轴微机械(micro-electro-mechanical system,MEMS)加速度计、三轴MEMS陀螺仪、三轴磁力计,嵌入式微处理器与无线通信模块以及电源管理模块组成。陀螺仪和加速度计采用InvenSense公司的MPU6050芯片,陀螺仪的角速度测量范围设置为±2 000°/s,加速度计的测量范围为±39.2 m/s2,采样频率为1 kHz。磁力计采用霍尼韦尔公司的HMC5883L,测量范围设置为±1.3 mT,数据输出频率为75 Hz。嵌入式微处理器是基于ARM Cortex-M4内核的STM32F405主控芯片,工作频率为168 MHz,通过集成电路总线(inter-integrated circuit,IIC)以100 Hz频率读取加速度计/陀螺仪数据,并以75 Hz读取磁力计数据。考虑到导航计算涉及浮点运算,我们使用了STM32F405浮点运算单元。无线通信模块采用HF-LPB100串口WIFI模块,设置为无线接入点模式,由上位机连接WIFI模块的服务集标识符加入网络获取数据。传感器原始数据及导航解算结果通过STM32F405的串行接口发送到WIFI模块,再通过用户数据报协议(user datagram protocol,UDP)方式发送到上位机。硬件平台使用的是600 mAh聚合物锂电池,可以连续为系统供电超过4 h。此外,为了实时监控电源电量,采用了德州仪器公司生产的BQ24401电源管理芯片,嵌入式微处理器可通过IIC总线实时读取剩余电池电量。
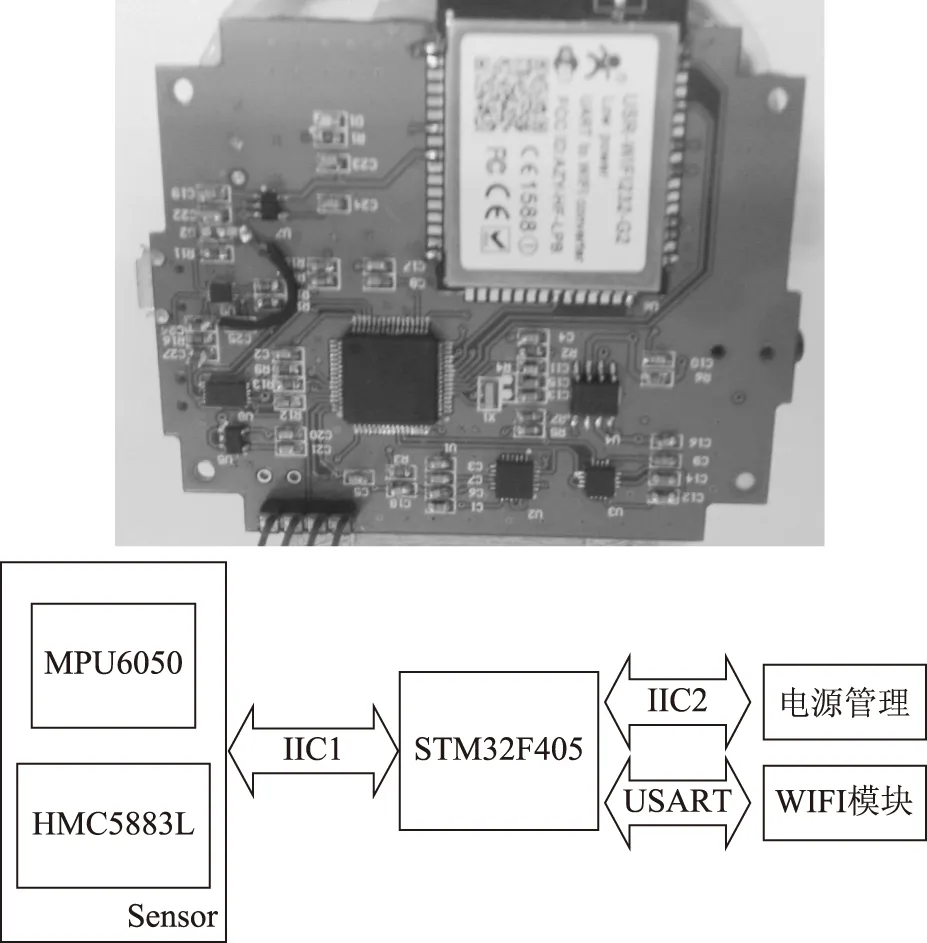
图1 用于康复训练的穿戴式传感器硬件平台
2.2 导航传感器建模
需要说明的是,惯性测量单元(inertial measurement unit,IMU)零偏是影响监控精度的关键因素,文献[8]论述了零偏对位置误差的影响与时间的高阶次幂成正比。IMU零偏主要包括固定零偏和时变零漂。其中,固定零偏可通过文献[9]介绍的现场标定算法校正,但时变零漂的存在仍然会极大的降低导航精度。为此,本文通过实际数据的零偏特性分析,绘制了IMU的自相关曲线,如图2所示。
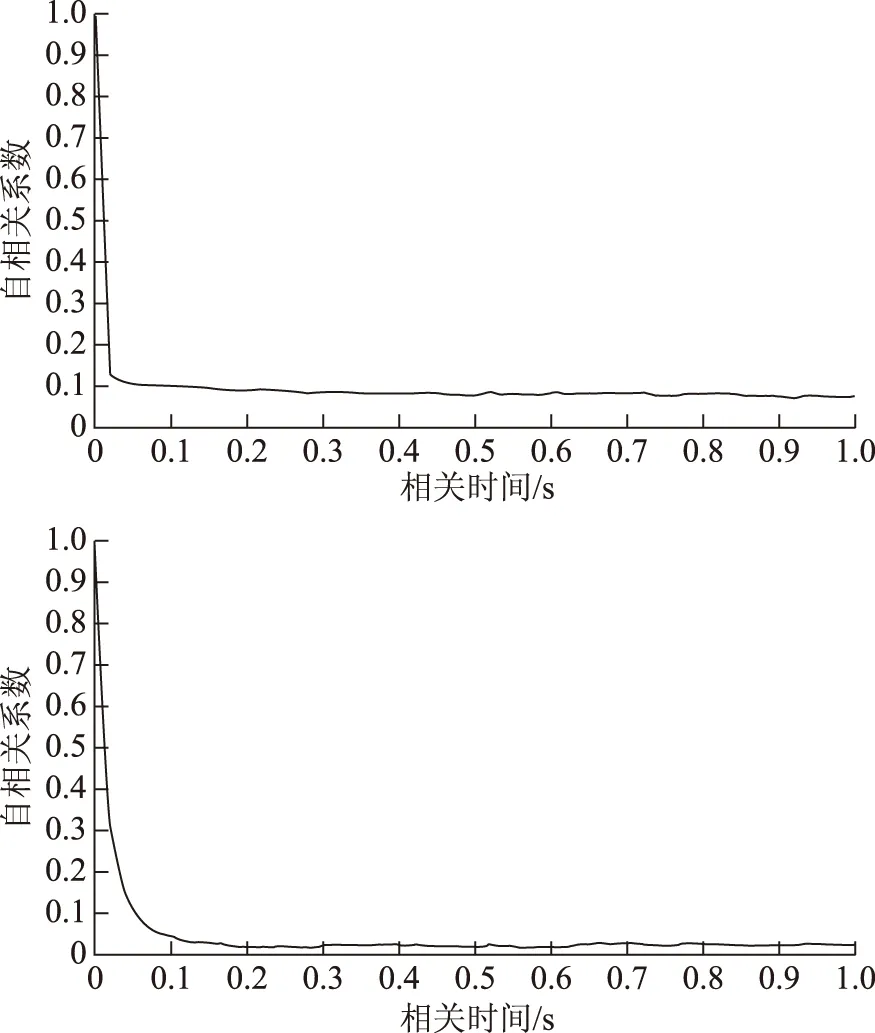
图2 IMU自相关函数曲线(左:加速度计,右:陀螺仪)
从图2中不难看出,低成本IMU的时间相关特性并不显著(相关时间小到可被忽略),传感器的零漂则可视为随机游走过程有
(1)
式(1)中,ba、bg分别为加速度计和陀螺仪的零偏,na、ng表示加速度计和陀螺仪零偏的随机噪声。
2 基于ZUPT的导航估计
2.1 算法结构
本文所采用的导航算法流程如下图3所示。
为保证数据的同步和相位线性特性,传感器原始数据分别通过4阶前置低通有限脉冲响应(finite impulse response,FIR)滤波器。然后,将频域滤波后的传感器送入ZUPT导航解算模块以获得实时的位置、速度与姿态信息。值得注意的是,在每次导航解算完成后,都需重新估计速度和姿态误差量以及其估计误差的协方差矩阵。
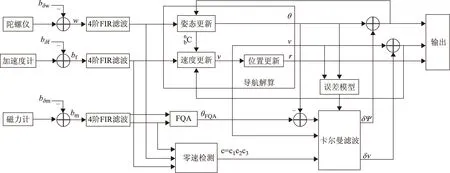
图3 导航算法结构
2.2 IMU力学编排
本文选择当地水平坐标系(East-North-Up,ENU)为导航计算坐标系(记为n系)。下面给出历元k的位置、速度与姿态的导航更新方程。
位置更新
(2)
速度更新

vk+1=vk+akΔt
(3)
姿态更新
(4)
式(4)中,v、r分别表示速度、位置矢量;w为角速率;bf为载体系下的比力矢量;q=[q1q2q3q4]T为姿态四元数。以上导航解算通过对时间积分递推获得当前位置、速度与姿态,然而积分过程中必然引入累积误差,为此建立如下PSI角动态误差方程
(5)
式(5)中,δv为速度误差;Ψ为姿态角误差;bδf为加速度计零偏;bδw为陀螺仪零偏。由于低成本MEMS陀螺零偏不稳定性较大,故在PSI角误差方程中忽略了地球自转等信号。
导航状态估计顾及偏瘫病人的低步频特点,每步间的停顿时间相对较长,导航状态估计采用间接校正的ZUPT建立如下12维误差状态方程

(6)
式(6)中,

FvΨ为n系三轴比力矢量构成的反对称矩阵
ZUPT所构造的观测方程为
Zk=Hxk+ε
(7)
2.3ZUPT检测判决条件
结合患者的步行特点,本文采用如下三个判决条件联合检测以确定是否进行ZUPT修正:
判决条件1:加速度量测幅值
(8)
判决条件2:角速率量测幅值
(9)
判决条件3:磁力计量测方差
(10)
当满足联合检测条件
c=c1c2c3=0
(11)
判定当前步行为持续移动状态,此时则采用式(12) ~ 式(15)仅对误差量和估计误差协方差矩阵做先验估计,
Φk+1=I12×12+FΔt
(12)
(13)

(14)

(15)
当满足联合检测条件
c=c1c2c3=1
(16)
判定当前步行状态为零速,执行卡尔曼滤波式(12)~式(19),获得状态的后验估计并反馈修正当前导航状态参数。
(17)
(18)
(19)
3 实验及分析
3.1 零速检测阈值参数选取
为合理确定ZUPT检测判决条件的阈值先验参数,离线采集了动态实测数据。加速度、角速率、磁力计量测幅值序列如图4所示。检测窗口长度设置为4个时间单元(0.01s),即每4单位进行一次综合分析。

图4 ZUPT判决阈值测试
3.2 初始对准与导航性能评估
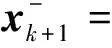
固定穿戴式传感器于脚背上方,上电后将上位机连接传感器WIFI网络。待网络连接成功,上位机提示开始步行康复训练并实时采集、存储数据。在步行开始前,需在站立位保持脚部短时间静止,以完成传感器初始化和IMU初始对准工作,即在脚部静止状态下,每单位时间进行ZUPT修正直至位置、速度与姿态收敛(如图5所示)。
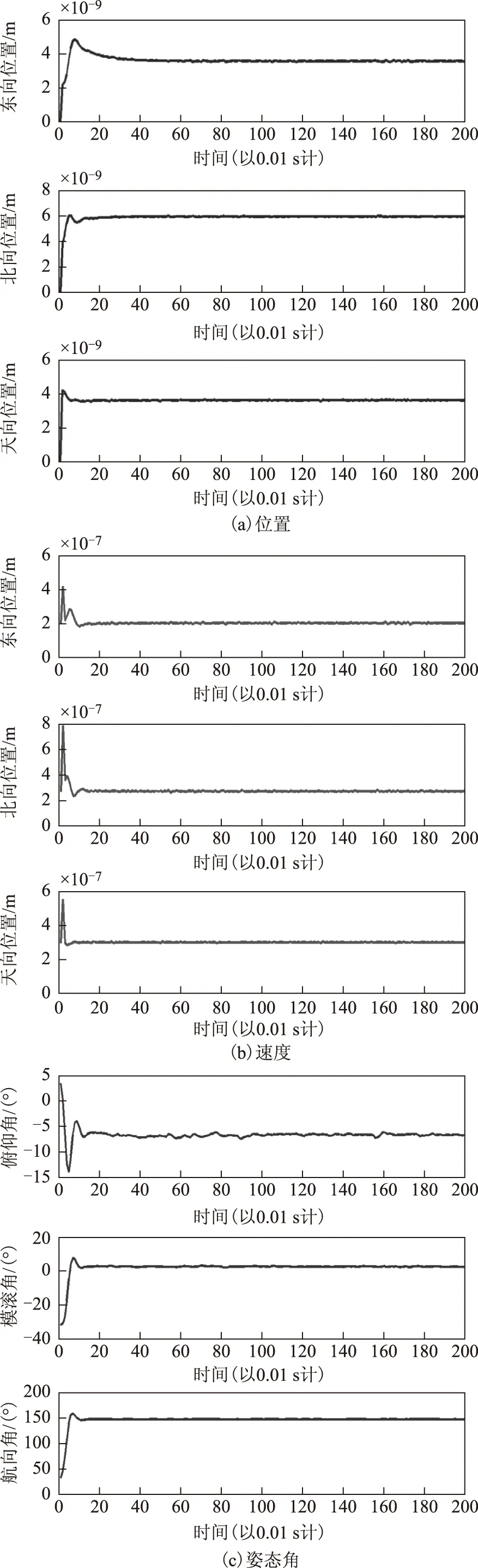
图5 IMU初始对准结果
图5中,数据的采样频率为100Hz,传感器上电之后,共设置了2s的初始化时间,共采集了200组数据。可以看到,本文设计的算法可以在0.2s内完成IMU的初始对准。上位机收到传感器数据判断初始化完毕后,提示患者开始康复训练。监控结果如图6所示。
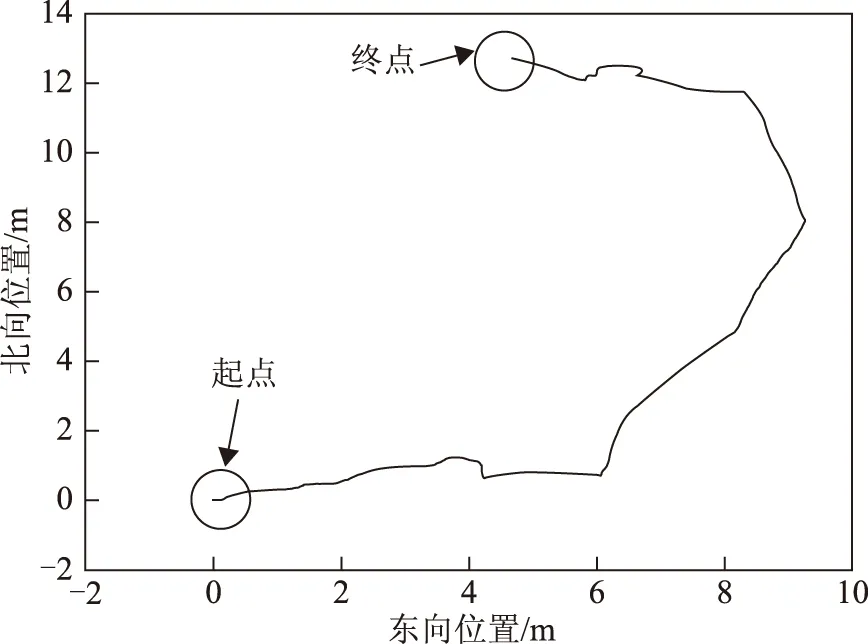
图6 患者平面步行轨迹
步行康复训练监控的结果如表1,结果基本符合偏瘫患者实际情况。从表1中可以看到,患者步行较为吃力,由于平均步长达到了0.57m,但步行平均速度很小,说明患者行动较为迟缓,且训练过程中停顿较多。
表1 步行康复训练监控结果
4 结束语
本文开发了一种穿戴的低成本传感器平台,对其中的消费级导航传感器进行了数学建模,提出了适用于患者康复训练的ZUPT算法及其静态检测条件,实验测试结果表明该系统可满足步行康复训练监控的基础数据需求。由于低成本惯性元件系统误差不稳定,且ZUPT无法永久消除位置的积分误差,极大的制约了系统性能,暂时无法满足大范围、长时间的导航需求。因此,后续工作将引入其他的室内导航定位传感器进行外部辅助,以提高步行康复训练监控系统的精度和可靠性。
[1] 瓮长水.脑卒中患者步行功能障碍评价[J].中国临床康复,2002,6(13):1869-1871.
[2] 瓮长水,毕胜,谢远见,等.脑卒中偏瘫患者步行速度与步长和步频的关系[J].中国临床康复,2003,7(7):1108-1109.
[3] MAUTZ R.Indoor Positioning Technologies[D].Zurich:ETH Zurich,2012.
[4] LUINGE H J.Inertial Sensing of Human Movement[D].Enschede:University of Twente,2002.
[5] 汪少初,刘开华,刘昱.胫骨捷联惯性导航的人员行进距离估计[J].天津大学学报:自然科学与工程技术版,2014,47(8):719-727.
[6] SKOG I,HANDEL P,NILSSON J O,et al.Zero-velocity Detection- An Algorithm Evaluation[J].IEEE Transactions on Biomedical Engineering,2010,57(11):2657-2666.
[7] COLOMAR D S,NILSSON J,HANDEL P.Smoothing for ZUPT-aided INSs[C]//Proceedings of 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN 2012).Sydney:[s.n.],2012:1-5.
[8] EL-SHEIMY N.Inertial Techniques and INS/DGPS Integration[M].Calgary:University of Calgary,2006.
[9] SYED Z F,AGGARWAL P,GOODALL C,et al.A New Multi-position Calibration Method for MEMS Inertial Navigation Systems[J].Measurement Science and Technology,2007(8):1897-1907.
[10]YUN Xiao-ping,BACHMANN E R,MCGREE R B.A Simplified Quaternion-based Algorithm for Orientation Estimation from Earth Gravity and Magnetic Field Measurements[J].IEEE Transactions on Instrumentation and Measurement,2008,57(3):638-650.
Research on Walking Rehabilitation Training Monitoring with Wearable Low-cost Navigation Sensors
ZHANGJian-feng1,ZHOUZe-bo1,2
(1.School of Aeronautics & Astronautics,University of Electronic Science and Technology of China,Chengdu 611731,China; 2.Institute of Geodesy and Geophysics,Chinese Academy of Sciences,Wuhan 430077,China)
With the requirements of real-time monitoring in walking rehabilitation training for stroke patients,a low-cost navigation hardware platform is developed.A zero-velocity update (ZUPT) algorithm is used to estimate the walking distance in real time.The navigation estimation formula are derived in the local frame and three joint-judgment conditions for ZUPT are constructed.Real experiment is carried out to demonstrate the efficiency of our proposed navigation algorithm.The result shows the developed navigation system can adequately fulfill the walking rehabilitation training requirement.
walking rehabilitation training;walking distance;navigation sensor;zero-velocity update
张剑锋,周泽波.穿戴式导航传感器在步行康复训练监控中的应用[J].导航定位学报,2015,3(3):126-131.(ZHANG Jian-feng,ZHOU Ze-bo.Research on Walking Rehabilitation Training Monitoring with Wearable Low-cost Navigation Sensors[J].Journal of Navigation and Positioning,2015,3(3):126-131.)
10.16547/j.cnki.10-1096.20150325.
2015-05-18
大地测量与地球动力学国家重点实验室开放基金(SKLGED 2014-3-3-E)。
张剑锋(1990—),男,四川内江人,工程师,主要从事惯性导航和组合导航算法研发工作。
TP24
A
2095-4999(2015)-03-0126-06
