基于模糊自适应PID控制器的空气悬架控制策略研究*
2015-04-18詹长书孙世磊
詹长书 程 崇 孙世磊
(东北林业大学交通学院 哈尔滨 150040)
0 引 言
随着汽车行业快速发展,空气悬架在高档轿车上已经逐步开始应用.空气悬架是车辆的重要组成部分,空气悬架对汽车的安全性、稳定性、舒适性有重要影响.空气悬架可以通过控制器控制算法的改变而改变悬架的控制力,从而控制车辆的车身加速度、悬架动行程、轮胎动载荷,因此空气悬架的控制策略对空气悬架有重要意义.
模糊控制是现代智能控制重要分支之一,控制过程中包含了以往的控制经验,具有适应能力强,抗干扰能力强的特点,特别适用于时变性、非线性的控制系统中[1].传统的PID参数经过确定就不能再调节,所以在一些控制系统中不能取得满意的效果[2].针对2种控制器不同的控制特点,把2种控制器结合为模糊自适应PID控制器对空气悬架进行仿真分析.
1 空气悬架模型的建立
1.1 空气弹簧模型
以主副气室一体式空气弹簧为研究对象,主气室和副气室内的气体状态方程为

式中:p为气体的压强,Pa;V 为气体的容积,m3;m为气体的质量,kg;R为气体常数,对空气R=287N·m/(kg·K);T为气体的温度,K.
主副气室的气体通过节流口进行流动,主副气室中压强较小气室的压强除以压强较大气室的压强≥b时,气流的质量流量不变且稳定;当<b时,气流质量流量与主气室和副气室压力比近似于1/4椭圆关系.b取0.528.
节流口气体质量流量表达式为[3]

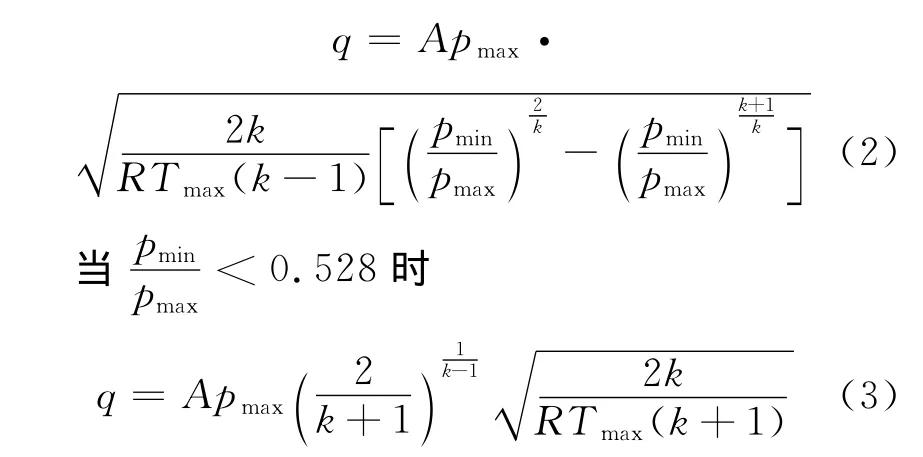
式中:q为气体质量流量;Tmax为气体温度(压力较大的气室);k为绝热系数,k=1.4;pmax=max{p1,p2};pmin=min{p1,p2};p1为主气室压强,p2为副气室压强;A为节流口有效面积(A=εA0,A0为节流口实际面积,ε为收缩系数).
空气弹簧在工作过程中,主副气室内的空气总质量是不变的,但是如果只研究主气室或副气室,则其质量是变化的,根据热力学和流体力学知识,气体的质量变化率为


当节流口没有完全关闭时,主副气室是有气体相互流通的,主气室和副气室的压强分别为[4-5]

式中:m1为空气悬架主气室气体的初始质量,kg;m2为空气悬架副气室气体的初始质量,kg;p3为空气悬架主气室的初始压强,Pa;p4为空气悬架副气室初始压强,Pa;V1为主气室的有效容积,m3;V2为副气室的有效容积,m3;V3为主气室的初始有效容积,m3;V4为副气室的初始有效容积,m3;V1=V3+x;V2=V4·x;其中为主气室有效容积变化率为副气室有效容积变化率;x为主副气室的高度变化量.
当空气悬架的压缩量大于0.03m时,节流口关闭,此时主气室和副气室无气体流通,主副气室的压力可表示为

式中:V′3为节流口完全关闭时主气室的有效容积,m3;V′4为节流口完全关闭时副气室的有效容积,m3;p′3为节流口完全关闭时主气室内的气体压强,Pa;p′4为节流口完全关闭时副气室内的气体压强,Pa.
由式(5)、式(6)得到节流口未完全关闭时的空气悬架弹簧力为

式中:p1和p2为式(5)、式(6)所表示的压强.
由式(7)、式(8)得到节流口完全关闭时的空气悬架弹簧力为

式中p1和p2为式(7)、式(8)所表示的压强;式(9)、式(10)中的S1为空气悬架主气室的垂向有效承载面积,m2;S2为副气室的垂向有效承载面积,m2.
1.2 单轮1/4车辆模型
文中建立了1/4空气悬架车辆模型,空气悬架是一个复杂的非线性系统,可以根据实际情况进行简化[6].空气弹簧的力学模型见图1.

图1 1/4空气悬架车辆模型
空气悬架的系统动力学方程为

式中:m1为簧上质量;m2为簧下质量;c为悬架阻尼系数;kt为轮胎刚度;z1为车身垂直位移;z2为车轮垂直位移;q为路面输入位移;U系统主动控制力.悬架的模拟仿真参数见表1.
2 模糊自适应PID控制器的设计
模糊自适应PID控制器是针对空气悬架运用模糊基本的理论,把规则、操作用模糊集表示,把这些模糊规则存入模糊控制器,然后计算机根据悬架的实际振动情况,根据模糊推理,可以自动对PID参数进行自适应调整[7],从而对悬架的振动进行调节.模糊自适应PID控制器的原理见图2.

表1 悬架的模拟仿真参数

图2 模糊自适应PID控制器原理框图
2.1 PID控制器
PID控制器是一种线性控制器,它根据给定信号与实际输出信号之间的偏差作为PID控制器的输入量,并对偏差进行比例运算、积分运算和微分运算,三者的运算结果相加为控制器的
运算结果[8],PID控制器的算法表达如下

式中:k为采样序号;Kp为比例系数;Ki为积分系数;Kd为微分系数.
PID控制器的参数对PID的控制效果有很大的影响,经过整定,得到比例系数Kp=10;积分系数Ki=6;微分系数Kd=1.5.
2.2 模糊控制器
模糊控制器是模仿人的推理和决策的一种智能控制器.模糊控制器包括输入控制变量和输出控制变量、隶属度函数的类型、模糊控制规则和解模糊化[9-10].其中模糊控制规则是模糊控制器的关键部分,根据技术经验和专家经验进行整理,得到模糊控制规则.选取车身的垂向加速度e和车身垂向加速度变化率ec为输入信号,输出信号为PID控制器的3个系数ΔKp,ΔKi,ΔKd.
根据路面的激励模型和车辆的速度,选取输入的基本论域为[-1,1],[-10,10],Kp的基本论域为[-100,100],Ki的基本论域为[-60,60],Kd的基本论域为[-1 000,1 000],输入输出的模糊论域均为[-6,6].输入量化因子Ke=6,Kec=0.6,输出比例因子Up=16.67,Ui=10,Ud=166.67.输入变量e,ec和输出变量Kp,Ki,Kd的隶属度函数均为三角形分布的隶属度函数.
输入输出变量的模糊子集以如下方式划分{负大,负中,负小,零,正小,正中,正大}={NB,NM,NS,ZO,PS,PM,PB},模糊规则表的建主要针对Kp,Ki,Kd3个参数的整定.表2~表4为3个参数的模糊规则表.

表2 ΔKp的模糊规则表

表3 ΔKi的模糊规则表
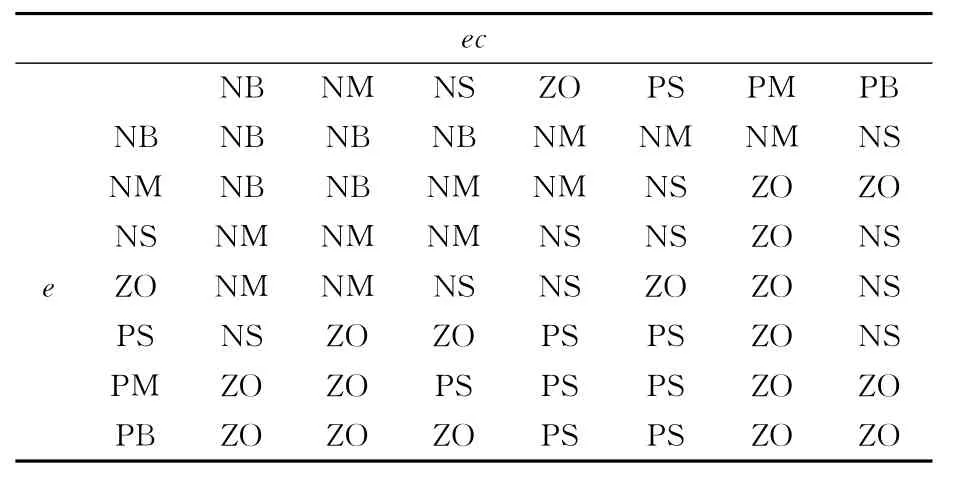
表4 ΔKd的模糊规则表
2.3 模糊自适应PID控制器模型
将模糊控制器与PID控制器结合起来得到的模糊自适应PID控制器模型.模糊自适应PID控制器的输入为车身垂直加速度与固定值信号的偏差,模糊控制器的输出 ΔKp,ΔKi,ΔKd,模糊PID控制器的输出则为具体模型见图3.

图3 模糊自适应PID控制器仿真模型
3 仿真过程及结果分析
路面激励模型采用滤波白噪声模型[11],选取B级路面等级,车速选择45km/h,仿真时间为30 s以保证结果稳定.分别仿真PID控制和模糊自适应PID控制空气悬架的振动过程,对比2种控制的车身加速度、悬架动行程和轮胎动载荷的均方根值.具体见表5.

表5 平顺性对比
根据对比分析,单一的PID控制能够改善车身加速度和小幅度改善轮胎动载荷,但悬架动行程有所提高.模糊自适应PID控制器能够有效改善车身加速度和轮胎动载荷,但悬架动行程也有所提高.但模糊自适应控制器对于车身加速度和轮胎动载荷的改善程度相对比较大,综合比较模糊自适应PID控制器比单一的PID控制器的控制效果要更好.
为了比较模糊PID控制和被动控制的差异,绘制了悬架车身加速度、悬架动行程、轮胎动载荷对比曲线.见图4~图6.
4 结束语
建立了1/4空气悬架模型,在B级路面上通过滤波白噪声激励,模糊自适应PID控制器能够有效改善振动中的车身加速度和轮胎动载荷,但悬架动行程略有提高.与单一的PID控制相比车身加速度和轮胎动载荷改善明显,悬架动行程略有提高.综合比较模糊自适应PID控制器控制效果更佳.

图4 车身加速度与时间仿真曲线

图5 悬架动行程与时间仿真曲线

图6 轮胎动载荷与时间仿真曲线
[1]高美静.复杂非线性系统的智能控制[D].秦皇岛:燕山大学,2002.
[2]李仲兴,李 美,张文娜.车辆空气悬架PID控制系统的研究[J].拖拉机与农用运输车,2009,36(5):56-58.
[3]郑治国,顾仁康.轻工液压传动与气压传动[M].北京:中国轻工出版社,1994.
[4]江浩斌,杜滢君,叶燊辰.新型一体式悬架减振支柱行程相关刚度特性研究[J].振动与冲击,2012,31(2):66-70.
[5]邱文军.空气悬架力学特性及主动控制策略的研究[D].长春:吉林大学,2014.
[6]詹长书,孙世磊.基于联合型模糊PID的非线性空气悬架建模与控制[J].武汉理工大学学报,2014,33(4):730-733.
[7]YANG Qiyao,XU Xing,ZHOU Kongkang,et al.Fuzzy adaptive PID control of Semi-active air suspension[J].2010International Conference on Computer,Mechatronics,Control and Electronic Engineering,CMCE 2010,2010,2:513-516.
[8]黄友锐,曲立国.PID控制器参数整定与实现[M].北京:科学出版社,2010.
[9]王述彦,师 宇,冯忠绪.基于模糊PID控制器的控制方法研究[J].机械科学与技术.2011,30(1):166-172.
[10]冯 勇,吴 凯,刘梦安.基于模糊PID算法的汽车半主动悬架振动控制[J].汽车零部件,2012(5):50-54.
[11]XIE Zhengchao,WONG P K,ZHAO Jing,et al.A noise-insensitive semi-active air suspension for heavy-duty vehicles with an integrated fuzzy-wheelbase preview control[J].Mathematical Problems in Engineering,2013(5):550-562.
