基于输出反馈控制的二级倒立摆系统
2015-04-17李艳辉张景炘
齐 迹, 李艳辉, 张景炘
(1. 齐齐哈尔大学 通信与电子工程学院, 黑龙江 齐齐哈尔 161006;2. 东北石油大学 电气信息工程学院, 黑龙江 大庆 163318;3. 大庆石化建设公司, 黑龙江 大庆 163714)
基于输出反馈控制的二级倒立摆系统
齐 迹1, 李艳辉2, 张景炘3
(1. 齐齐哈尔大学 通信与电子工程学院, 黑龙江 齐齐哈尔 161006;2. 东北石油大学 电气信息工程学院, 黑龙江 大庆 163318;3. 大庆石化建设公司, 黑龙江 大庆 163714)

由于直线二级倒立摆系统中,小车和倒立摆速度不能直接测量,所以尝试采用基于输出反馈控制器的鲁棒H∞控制方法对二级倒立摆进行控制。首先,利用Lyapunov稳定性理论并结合LMI技术进行输出反馈控制器的设计,然后在Matlab环境下对倒立摆系统进行仿真研究。实验结果表明,本文所设计的输出反馈控制器是令人满意的。
二级倒立摆; 输出反馈控制; 鲁棒性;H∞范数
0 引 言
倒立摆系统具有高阶次、多变量、严重不稳定等特点[1-2],控制系统中一些抽象的概念如稳定性、可控性、系统的收敛速度和抗干扰能力都可以通过倒立摆系统反映出来[3-4],许多控制理论的专家、学者一直将它视为典型的研究对象,不断探索新的控制策略和方法。文献[5]研究了直线倒立摆系统控制特性的影响因素;文献[6]采用变增益LQR控制方法对倒立摆系统进行控制;Taylor 和Ibanez等人分别采用极点配置和Lyapunov函数对倒立摆系统进行研究[7-8];文献[9]采用非线性逆系统轨迹控制实现三级倒立摆的自动摆起;文献[10-12]采用基于观测器的方法对倒立摆系统进行研究。这些控制方法已被广泛接受,具有重要的理论和实际应用价值。然而,直线二级倒立摆系统中直接可测的状态只有小车和倒立摆的位置,小车和倒立摆的速度是不能直接测量的,所以上述方法存在一定的局限性。
本文通过设计输出反馈控制器来实现对倒立摆系统的控制[13-14],将该系统中小车与导轨之间的摩擦力当作一种扰动,同时考虑系统参数摄动问题,对二级倒立摆系统进行建模,选择合适的Lyapunov函数推导出输出反馈控制器存在的充分条件,并将其表达成具有线性矩阵不等式约束的凸优化问题,利用数字软件进行求解。仿真实验证明所设计的输出反馈控制器在干扰信号作用和模型参数摄动的情况下,具有较强的抗干扰能力和鲁棒稳定性。
1 问题描述
根据文献[15],得到包含扰动和参数摄动的倒立摆线性化模型为
(1)
其中:x(t)∈Rn是状态变量;y(t)∈Rp是被控制信号;z(t)∈Rq是测量输出;u(t)∈Rm是控制输入信号;w(t)是作用在小车上的干扰信号;假定系统矩阵A,A1,A2,B,B1,C是不确定性矩阵,但可以表示为某些已知顶点矩阵的凸组合,即Ω=(A,A1,A2,B,B1,C)∈R,集合R为一个给定的凸有界多面体域,表示为
其中,Ri=(Ai,A1i,A2i,Bi,B1i,Ci)为R的第i个向量。
本文目标是设计如下形式的输出反馈控制器,用来测量小车和倒立摆的速度,采用鲁棒H∞控制方法使得二级倒立摆在不稳定的平衡点处保持稳定的平衡。
(2)
其中:xc(t)是控制器状态向量;Ac,Bc,Cc,Dc是待设计的控制器增益矩阵,考虑式(1)和式(2)可以得到如下倒立摆闭环系统
(3)
其中:
(4)
2 基于输出反馈控制器的鲁棒H∞方法
本文的期望目标为:

(5)

2.1 闭环系统的稳定性与H∞性能分析
(6)
(7)
其中,P>0。
沿方程(3)的解对上式求导数,得:
(8)
因此,当假定扰动输入w(t)=0时,可得


(9)
2.2 输出反馈控制器求解
(10)
此外,若上述线性矩阵不等式(10)有可行解,则H∞输出反馈控制器的参数可由下式求得:
(11)
证明:根据定理1,若条件(6)满足则有P为非奇异矩阵,令
(12)
不失一般性,假设P2为非奇异矩阵,我们可以定义如下的矩阵变量:
(13)

(14)

在数学教学中,无论是数与代数、图形与几何,还是统计与概率等知识,处处蕴含着数形结合思想。教材借助几何图形的直观来帮助学生理解抽象概念。生动形象的图形使得抽象的知识变得趣味化、直观化,学生在学习时,不再感到枯燥乏味,反而能从中获得有趣的情感体验,从而实现了主动探索,把握了概念本质。
(15)
定义矩阵变量P1=X,R1=Y和
(16)
考虑式(4),则不等式(15)中各符号表示为:
(17)
将式(17)代入式(15)得到式(10),再将P1=X,R1=Y代入式(16)得到式(11)。因此根据定理1可知倒立摆闭环系统(3)式渐近稳定且具有H∞性能水平γ>0。证毕。

(18)
其中,δ=γ2。

由凸多面体不确定系统的内在特性,很容易将定理2推广,从而得到不确定倒立摆系统的鲁棒H∞输出反馈控制器。
(19)
此外,若上述线性矩阵不等式(19)有可行解,则H∞输出反馈控制器的参数可由下式求得
(20)
3 实时控制实验
考虑形如(1)式的倒立摆系统Σ,系统参数如下[16]:
其中,ρ,σ为不确定参数。
根据定理1很容易证明给定这个倒立摆系统是渐近稳定的。针对倒立摆系统、凸多面体不确定倒立摆系统分别进行仿真研究,验证所得结果的有效性。
(1) 倒立摆系统。当ρ=0,σ=0时的H∞输出反馈控制器设计问题。
应用Matlab线性矩阵不等式工具箱求解定理2可得最优扰动衰减水平为γ*=0.923 8,同时可求得H∞输出反馈控制器的参数
(2) 凸多面体不确定性倒立摆系统。当不确定参数ρ,σ满足-1≤ρ≤1,-0.5≤σ≤0.5时的鲁棒H∞输出反馈控制器设计问题。
应用Matlab线性矩阵不等式工具箱求解推论1可得最优扰动衰减水平为γ*=2.032 5,同时可求得H∞输出反馈控制器的参数
可见,无论系统矩阵是否存在不确定性,所采用的方法都可以得到令人满意的扰动抑制度,只是倒立摆系统存在凸多面体不确定性时扰动抑制度大,说明不含摄动时的控制效果较好。
为了进一步证明本文设计方案的可行性,我们将所设计的H∞输出反馈控制器应用于凸多面体不确定性二级倒立摆的稳摆控制实验中。图1给出倒立摆系统上、下摆角度随时间变化的输出响应,可以看出,基于H∞输出反馈控制器的倒立摆稳摆控制是有效的,上摆和下摆均在较短的时间内达到了平衡状态。
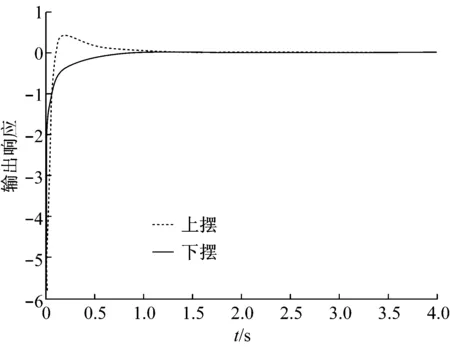
图1 倒立摆的输出变化曲线
4 结 语
将二级倒立摆系统中小车与导轨之间的摩擦力当作一种扰动,同时考虑系统参数摄动问题,尝试采用输出反馈控制器的方法对二级倒立摆系统进行控制。给出了系统鲁棒稳定且满足H∞性能的充分条件,应用LMI设计了输出反馈控制器。不仅从理论上证明了该方法可行,而且通过仿真对其进行验证,理论和实验都表明该设计方法确实可行。
[1] 王家军,刘栋良,王宝军. X-Z倒立摆的一种饱和非线性稳定控制方法的研究 [J]. 自动化学报, 2013,39(1):92-96.
[2] 宋运忠,张蛟龙,张 伟. 基于性能协调的平面二级倒立摆控制[J]. 控制工程, 2011,18(2):258-261.
[3] 高星泉,陈 虹. 电机驱动力矩受限的旋转倒立摆保代价控制[J]. 吉林大学学报, 2011,41(5):1444-1449.
[4] 冯 帅,马 州,周 珂,等. 虚拟线性倒立摆模型在行走机器人双腿支撑相中的应用[J]. 清华大学学报, 2011,51(7):960-965.
[5] 罗 忠,史志勇,胡 鹏,等. 直线倒立摆系统控制特性的影响因素分析与实验[J]. 东北大学学报, 2011, 32(4):559-562.
[6] 张永立,李洪兴,苗志宏,等. 基于变增益LQR控制方法的二级倒立摆自动摆起[J]. 系统工程理论与实践, 2011, 31(7): 1342-1355.
[7] Ibanez C A, Frias O G. Controlling the inverted pendulum by means of a nested saturation function[J] Nonlinear Pynamics, 2005,40:367-374.
[8] Taylor C T,Chotai A. Non-minimal state dependent Riccati equation and pole assignment control of nonlinear systems[C]//19thInternational Conference on Systems Engineering, Las Vegas, 2008:49-54.
[9] 张永立,程会峰,李洪兴. 三级倒立摆的自动摆起与稳定控制[J]. 控制理论与应用, 2011,28(1) :37-45.
[10] 王洪斌,姚洪磊. 基于干扰观测器的倒立摆自适应滑模控制及仿真研究[J]. 系统仿真学报, 2010, 22(6):1476-1480.
[11] 罗 忠,赵士鑫,史志勇,等.基于状态观测器的倒立摆系统控制与实验研究[J]. 东北大学学报, 2010, 31(1):107-110.
[12] 王 雪,柴 毅,丁宝苍,等. 自动控制原理开放性实验的开发[J]. 实验室研究与探索, 2011,30(7):242-244.
[13] Graichen K, Treuer M, Zeitz M. Swing-up of the double pendulum on a cart by feedforward and feedback control with experimental validation[J] Automatica, 2007, 43(1):63-71.
[14] 祁 虔,李祖枢,谭 智,等. 基于卡尔曼滤波的倒立摆控制系统噪声抑制[J]. 控制与决策, 2010,25(8):1144-1148.
[15] 刘珊中,朱邦太. 基于控制的倒摆平衡系统鲁棒性研究[J]. 电光与控制, 2000(2):1-6.
[16] 李艳辉,李红星,李建华,等.鲁棒H∞控制在非线性倒立摆系统中的应用[J]. 大庆石油学院学报, 2007,31(5) :97-100.
Study of Double Inverted Pendulum System Based on Output Feedback Control
QIJi1,LIYan-hui2,ZHANGJing-xin3
(1.Communication and Electronic Engineering Institute, Qiqihar University, Qiqihar 161006, China;2. Electrical and Information Engineering college, Northeast Petroleum University, Daqing 163318, China;3. Daqing Petrochemical Construction Company, Daqing 163714, China)
Due to line two level inverted pendulum system, cart and inverted pendulum velocities can not be measured directly, Therefore, it is tried to use robustH∞control method based on output feedback controller to control the two stage inverted pendulum. First, the output feedback controller is designed with Lyapunov stability theory and LMI technology, and then simulation is realized under Matlab. The result shows that the designed output feedback controller is satisfactory.
double inverted pendulum; output feedback control; robustness;H∞norm
2014-10-24
国家杰出青年基金项目(61004067);黑龙江省自然科学基金项目(QC2011C043);齐齐哈尔大学青年教师项目(2012k-M08);齐齐哈尔大学教育科学研究项目(2013068)
齐 迹(1979-),女,黑龙江呼兰人,硕士,副教授,主研领域:鲁棒控制,滤波,随机系统,网络控制系统。
E-mail:qi_ji_1979@126.com
TP 273
A
1006-7167(2015)05-0108-04