基于无人遥控潜水器的水下管道卡箍式连接件安装机具设计
2015-04-16山东科技大学机械电子工程学院山东青岛66590山东科技大学文法学院山东青岛66590
, (.山东科技大学 机械电子工程学院, 山东 青岛 66590; .山东科技大学 文法学院, 山东 青岛 66590)
引言
近年来随着海洋油气资源的大力开采,水下油气管道铺设作业量也日益增加,对管道连接件安装的速度和精度也提出了更高的要求。管道连接件是将待连接管道连接在一起的装置。由于深水环境的复杂性,深水管道连接件的安装作业主要通过机器人来进行。目前国内外管道连接件安装装置的研究主要集中在法兰式连接件和卡压式连接件方面[1-3],针对大口径管道卡箍式连接件的安装装置研究较少[4,5]。本研究研制的水下大口径管道卡箍式连接件安装机具,对于卡箍式管道连接有着很好的应用价值。
1 总体设计方案介绍
卡箍式连接件主要包括卡箍、密封圈、连接销钉和螺栓紧固件[6-8],内径为80~120 cm,结构如图1所示。该连接方法以其简易可靠,占据空间小,密封性能好等优点得到了广泛的应用并占据了越来越多的市场份额[9]。其安装工艺一般是先完成两组销钉连接,再进行两组螺栓法兰连接。
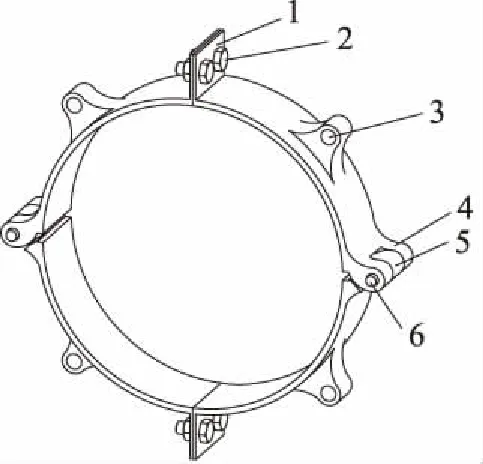
1.连接法兰 2.连接螺栓 3.吊耳 4.双耳环 5.单耳环 6.连接销钉
装置的总体设计方案如图2所示,基本上呈前后对称的结构。支架1为直角形状,可以安装在ROV(无人遥控潜水器)上,在支架的横梁上有丝杠滑台。图2中虚线框A部分为连接件库,虚线框B部分为机械手。机械手伸缩液压缸5的底座与丝杠滑台的滑块4相连接,即机械手可以在滑台的驱动下左右移动。9为待连接管道。

1.支架 2.驱动电机 3.丝杠 4.滑块 5.伸缩液压缸 6.机械手架 7.开合液压缸 8.手指 9.待连接管道 10.双伸缩液压缸 11.夹紧液压缸 12、16.钢管 13.保持杆 14.吊耳环 15.支撑杆
2 机械手设计方案
2.1 机械手设计
如图3所示,机械手伸缩液压缸的活塞杆与机械手架6相连接。机械手架为“工”字形,在机械手架的上方横杆上水平对称安装有夹紧液压缸11、在机械手架的下方横杆上对称铰接安装有开合液压缸7,开合液压缸的活塞杆上安装有手指8。
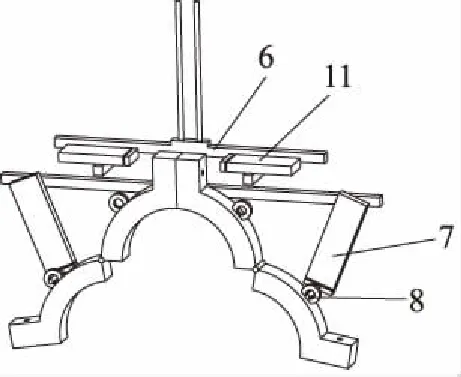
6.机械手架 7.开合液压缸 8.手指 11.夹紧液压缸
当机械手开合液压缸7的活塞杆收缩时,手指8带动连接件下端保持张开状态,并且下端开口的最小宽度大于管道的直径d。当活塞伸出时,活塞杆端部的手指带动连接件敞开的两部分绕各自的连接销钉转动直至闭合,连接法兰接触贴合到一起,使原本张开的连接件闭合。右侧液压缸7的活塞杆端部安装有液压力矩扳手。在使用中为了使各液压缸活塞杆保持在平面内运动,机械手上所有的液压缸均带有活塞杆导向装置。
为了计算手指8的布置位置以及液压缸7的参数,以机械手架下方横杆的中心为原点,以水平方向为x轴,竖直方向为y轴,垂直纸面向外的方向为z轴建立空间坐标系,坐标轴的方向如图4中的标注所示。
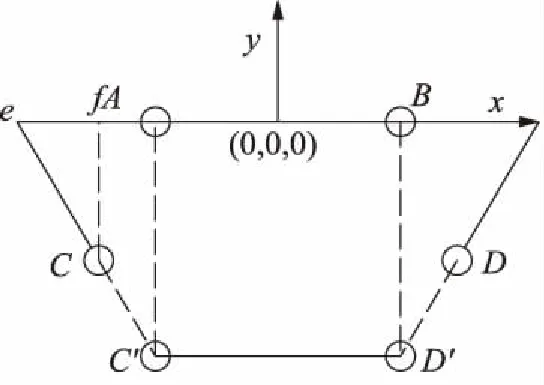
图4 机械手空间坐标系
假设正方形的边长为2a,连接件吊耳环A、B、C、D投射在xoy平面上的坐标为:

当液压缸7的活塞杆伸出时,连接件的敞开端闭合。因为连接件上的4个吊耳正好分布在1个正方形的4个顶点,所以连接件闭合后吊耳环A、B、C、D投射在xoy平面上的坐标为:
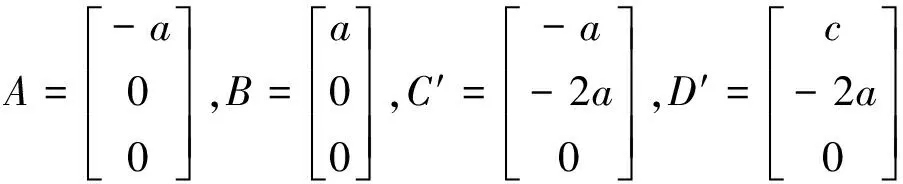
C点、D点和C′、D′点也是两根手指在连接件敞开端在闭合前后投射在xoy平面上的坐标位置。根据图4中的几何关系,可以对液压缸7的行程、原点到e点的距离等参数进行确定。AC′距离为连接件上两吊耳之间的距离,eC之间的距离为液压缸活塞杆缩回时缸体长度,CC′为活塞杆的长度,△eCf∽△eC′A,可据此对液压缸进行选型,并求出eA的长度。
2.2 连接件库设计
连接件库是水下作业主体上用于存放连接件的装置,连接件库可以使得水下作业主体一次下水携带多个连接件,这样减小了水下作业主体往返水面和工作地点的频率,实现在水下的持续作业,一方面提高了水下作业主体的续航能力,另一方面大大节约了作业时间。
如图2所示的,连接件库上方支撑杆15两端垂直安装有钢管12、16、钢管水平间距是连接件上方左右吊耳环圆心之间的距离。在连接件库下方有2根保持杆13,其作用是使得连接件下方保持张开状态。此外在连接件库中,每个连接件的前方均安装有一双伸缩液压缸10,当液压缸活塞杆伸出时,可以挡住连接件,防止连接件从连接件库中脱落。原理样机中连接件库如图5所示。
图5 连接件库
2.3 液压系统设计
机械手的液压系统原理图如图6所示。用三位四通阀控制液压缸5、7、10、11的动作,采用二位二通阀控制液压力矩扳手的动作。机械臂在正常给液的状态下液压缸5、7和11的活塞杆为缩回状态,而且液压缸7与横杆铰接的地方装有挡块,即液压缸7活塞杆缩回时缸体与横杆会保持一定角度。此时机械手上的手指8正好对准连接件库中连接件下方的两个吊耳环14。
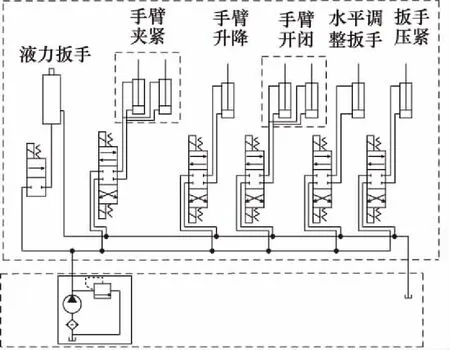
图6 安装机具液压系统原理图
使用SolidWorks Motion仿真软件对机械手的单侧闭合运动进行了仿真并提取了液压缸7活塞杆的角速度。其速度曲线呈对称的先上升后下降的状态。这是因为液压缸7活塞杆完全缩回时,连接件的下半部分重心在其无约束自然下垂时的重心位置之上,在运动初始阶段,由初始位置运动到平衡位置的时候,由于连接件下半部分重力分量的作用,运动呈加速状态,因此角速度不断提高。当越过平衡位置的时候,连接件下半部分开始在其平衡位置的重心之下运动,重力分量开始变成阻碍连接件下半部分转动的力,运动进入减速状态,因此最大速度出现在连接件下半部分的平衡位置。
3 控制系统设计
因为装置在水下工作,拖缆运行对装置的运动影响较大,因此开发了一套无线控制系统,上位机安装在作业母船上,下位机安装在本安装装置上,上位机和下位机之间进行无线通讯。采用串口通讯进行数据传输。电磁阀与继电器相连接。
控制系统的界面按钮与继电器开闭映射关系表如表1所示。
2)A级高度钢筋混凝土部分框支剪力墙,6度最大适应高度120m,但平面和竖向均不规则的建筑,按减少20%控制,即:120×(1-20%)=96m<98.4m(超 2.5%)。
4 作业过程
在进行卡箍式连接件安装作业时,已经有前期的施工工具完成了管道的对中和密封圈的套装工作。
在装置下水作业之前,需要对连接件进行预安装,即将一组连接法兰和两个铰接轴装配好,另外使用防水粘胶将螺栓和螺母分别固定在另一组法兰中两个法兰的外侧。将预装配好的连接件放入图2中的连接件库A中。

表1 界面按钮与继电器开闭映射关系表(部分)
该装置通过支架安装在ROV上,ROV将装置运送到水下管道的接口位置(管道接口的定位及装置姿态调整等工作由ROV完成)。
液压缸5和11的活塞杆缩回,手指8对准连接件库中连接件吊耳孔,丝杠滑台控制机械手左移,手指8穿进连接件库中最外侧连接件下方两个吊耳中,此时连接件前面的液压缸活塞杆为伸出状态,挡住了连接件,即机械手无法将连接件从库中取出。然后控制夹紧液压缸11的活塞杆伸出,夹紧连接件的上侧法兰,当机械手上的夹紧液压缸把连接件的上侧法兰夹紧后,给出控制信号,控制该连接件前面的液压缸活塞杆收回,允许连接件放行,此时,机械手可以将连接件从库中抓取出来。
滑台右移,在ROV的配合下找准管道接口位置,使得连接件对准接口。液压缸5活塞杆伸出,连接件的上半圆与管道壁贴合,此时液压缸7活塞杆伸出,带动连接件下半部分转动,直至法兰贴合,然后控制液压力矩扳手对螺栓进行预紧。至此,连接件就安装到了管道上,控制夹紧液压缸11的活塞杆缩回,机械手右移,将手指从吊耳孔中抽出。液压缸7的活塞杆缩回。液压缸5活塞杆缩回,准备下一个连接件的安装。
5 样机制作
为了验证设计的可行性,制作了模型样机进行测试。为了制作的方便,使用气动系统代替了液压系统。
图7是实验室制作的模型样机。机械臂和连接件库如图7a所示。图7b是机械手携带连接件找到接口位置示意图。液压缸7活塞杆伸出,连接件闭合的状态如图7c所示。

图7 模型样机测试
6 结论
设计了水下大口径管道卡箍式连接件安装装置,重点设计了安装机械手,另外还包括连接件库,连接件库的设计大大减小了安装装置往返于工作地点和母船之间的次数,提高了作业效率,机械手可以将连接件从连接件库中取出并进行安装,实现了水下管道卡箍式连接件的无人水下作业。借助软件分析了安装时连接件的运动状况,通过运动仿真,分析了连接件重心位置对其运动的影响。在后期研究中应当进一步提高装置的自动化作业水平,实现智能化作业。
参考文献:
[1]王立权,王文明,赵冬岩,等.深海管道法兰连接方案研究[J]. 天然气工业,2009,29(10):89-92.
[2]GIOVANNI CORBETTA, DAVID S COX. Deepwater Tie-ins of Rigid Lines: Horizontal Spools or Vertical Jumpers[C]//SPE Offshore Europe Conference Proceedings. Aberdeen (Scotland): Society of Petroleum Engineers (SPE), 1999:203-209.
[3]时黎霞,李志刚,赵冬岩,等. 海底管道回接技术[J].天然气工业,2008,28(5):106-108.
[4]孙朝阳,盛文利,齐辉,李希治.水下沟槽式管道连接件安装作业机器人设计[J].机械设计与制造,2015(5):127-129,133.
[5]孙朝阳,李佳奕,盛文利,孙海霞,等.深水复杂环境下大口径管道沟槽式连接器安装作业机器人:中国,201410394908.5[P]. 2015-02-11.
[6]杨正中,李育磊,杨旭.卡箍式柔性管道连接技术[J].中国油脂,2007,(9):72-74.
[7]朱立云.沟槽式机械配管系统的应用[J].管道技术与设备,2000,(4):17-21.
[8]C Santus, L Bertini, M Beghini. Torsional Strength Comparison Between Two Assembling Techniques for Aluminum Drill Pipe to Steel Tool Joint Connection[J]. International Journal of Pressure Vessels and Piping, 2009,(6):177-186.
[9]李洁利.一种新型管道连接技术——卡箍式连接[J].工程建设与设计,2000,(6):58-59.