多轴全地面起重机稳态转向特性分析
2015-04-07史青录杜妮丝葛明此
邵 波,史青录,杜妮丝,武 德,葛明此
(太原科技大学机械工程学院,太原 030024)
多轴全地面起重机稳态转向特性分析
邵 波,史青录,杜妮丝,武 德,葛明此
(太原科技大学机械工程学院,太原 030024)
根据拉格朗日法建立了多轴全轮转向车辆的三自由度动力学模型和运动微分方程,采用零质心侧偏角控制策略,研究了车辆作稳态转向时,其转向中心位置、横摆角速度增益及侧倾角增益如何随车速而变化,并且给出了稳态圆周行驶的评价指标。在零质心侧偏角控制策略下,讨论了多轴全轮转向车辆的转向特性,分析了影响转向性能的因素。为多轴全地面起重机的转向设计提供了理论依据。
全地面起重机;多轴转向;横摆角速度增益
多轴全地面起重机车身长,轴数多,重量大,转向半径较大,灵活性差[1],在高速行驶模式下稳定性差,转向失真严重,甚至在中低速条件下也可能发生转向失控,造成严重安全事故。而理想的转向特性应为低速时转向半径小,机动灵活;高速下车身姿态变化小,稳定性强[2]。对全地面起重机转向特性的研究,有助于提高全地面起重机的低速灵活性、高速的稳定性与安全性。国内外对多轴转向技术的研究多在三至七轴车辆之间进行[3],且大多数文献只对二自由度动力学模型的转向性能进行了分析。然而,二自由度模型较为简单,所得影响转向的参数较少,不能全面体现出多轴车辆的转向特性。要了解更复杂的细节,需要对二自由度模型进行扩展[4]。以某九轴全地面起重机为研究对象,利用拉格朗日方程建立了全轮转向三自由度模型,全面考虑了车辆的侧向运动、横摆运动以及侧倾运动,对其稳态转向进行了细致的理论分析与研究。
1 多轴转向车辆的三自由度模型
描述车辆运动的三自由度模型基于以下理想化假设:
(1)车辆行驶于平坦路面,忽略车轮滚动阻力、空气阻力。
(2)车辆工作于线性区域,侧偏力正比于侧偏角。
(3)转向系统是刚性的。
(4)忽略了转向时左右轮胎载荷的重新分配,以及悬架运动学的影响。
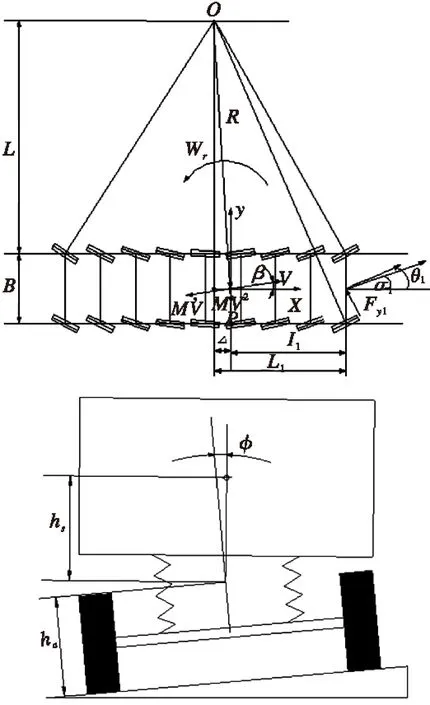
图1 线性三自由度多轴转向车辆模型Fig.1 The linear 3-DOF multi-axle steering vehicle model
车辆坐标系定义如下:坐标原点定于车辆质心,车辆行驶方向为x轴正方向,垂直路面向下为z轴正向,y轴正向按右手法则确定。多轴车辆线性三自由度模型如图1所示。全路面起重机沿x轴的前进速度视为定值,因此它只有沿y轴的侧向运动,绕z轴的横摆运动以及车身绕x轴的侧倾运动。
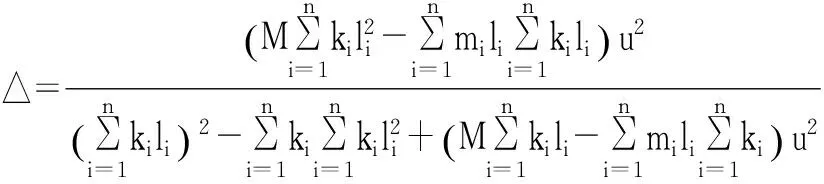
转向中心在车身的投影点到各轴的距离为Li,其到质心的距离为△.注意其与x轴正向一致为正,反之为负。定义ms为车身质量,mi为各个车轴的质量。u 、v分别为车辆质心处的速度在x,y轴上的分量。β为车辆质心处的侧偏角。
2 三自由度多轴转向车辆微分方程
拉格朗日动力学方程形式如式(1)所示[5]。
(1)
根据所定义的坐标系,可以写出车辆的动能T,势能V、耗散能D和广义力Q.将其带入方程,最终可得式(2).
(2)
3 稳态圆周运动微分方程
车辆稳态转向响应代表了车辆的基本操纵性能。通过研究稳态转向运动中的车辆特性,我们可以理解车辆运动的基本性质[5]。
采用零质心侧偏角控制策略,使进行稳态转向的车辆的质心侧偏角保持为零。各轴平均转角与第一轴平均转角之间的关系为θi=Kpiθ1,其中Kpi为第i轴转角与第一轴转角转向比。结合阿克曼定理,可得:
(3)
(4)
车辆的转向半径R:
(5)
稳态横摆角速度增益:
(6)
对比两轴车辆的稳定性因数:
(7)
可得:
(8)
K为稳定性因数[7],根据其数值不同,将稳态响应分为三类:不足转向、中性转向和过度转向。以此方法对车辆稳态转向进行划分。
K=0时,稳态转向为中性转向;
K>0时,稳态转向为不足转向;K值增大,横摆角速度增益曲线变低,不足转向量增大。
K<0时,稳态转向为过度转向。
令稳态横摆角速度增益的分母为零,则其趋于无穷大,此时的车速uch为临界车速。
(9)
(10)
稳态侧倾角增益φ/θ1:
(11)
4 基于零质心侧偏角控制策略的全轮转向特性分析
影响多轴车辆稳态响应的因素有各轴车轮侧偏刚度、轴间距布置、车轴质量与整车质心位置。

由式(9)可知,当分母差值减小,车辆的临界车速将会增大。
在设计时应注意:
假设各轴轮胎侧偏刚度与各轴质量均相同,令K=0,可发现质心位于车辆纵向几何中心附近。当整车质心较之此点靠近前轴时,稳态转向特性为不足转向;当整车质心较之此点靠近后轴,稳态转向特性为过度转向。
因而,适当增大li的负值量,即将整车质心适当前移,有助于提高不足转向特性。在多轴车辆设计过程中,增加质心后转向轴的个数有利于提高车辆的不足转向特性。同时,减小质心前的车轮侧偏刚度,增大质心后的车辆侧偏刚度,有助于保证适当的车辆不足转向特性。
5 运动仿真与分析
利用MATLAB编程对某九轴全地面起重机进行转向特性仿真分析,结果如图2至图7所示。
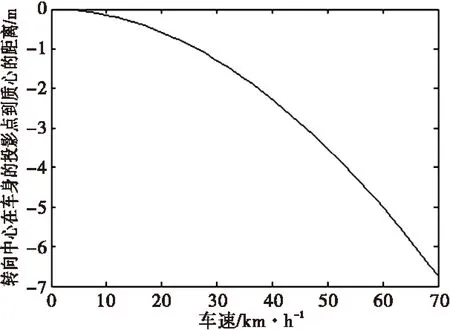
图2 转向中心车身投影点到质心的距离随车速的变化曲线Fig.2 The relationship of vehicle speed and distance betweenthe turning center and the mass center
由图2可知,多轴车辆转向时转向中心车身投影点到质心的距离随车速的提升而增加,即此投影点随车速而后移。车速处于0 km/h~30 km/h这个范围时,△的范围由0变为-1.4 m,此时转向中心车身投影点位于第五、六轴之间;而车速在30 km/h~60 km/h这个范围时,△由-1.4 m逐渐变为-5 m,即转向中心车身投影点逐渐过渡到第七、八轴之间。
图3显示转向中心车身投影点到第一轴的距离随车速提升而增加。
图4为第二至八轴车轮转角与第一轴的比例系数和车速的关系曲线。车速较低时,第二、三、四、五轴车轮与第一轴转向一致,后四轴与之相反。随着车速提升,各轴车轮转向趋于一致。
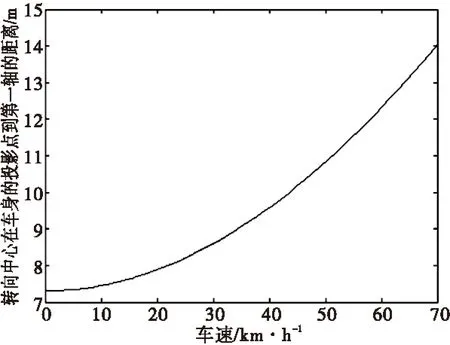
图3 转向中心车身投影点到第一轴的距离随车速的变化曲线Fig.3 The relationship of vehicle speed and distancebetween the turning center and the first axle
图4 各轴与第一轴的转向比随车速的变化曲线Fig.4 The relationship of turning angle ratio Kpi and vehicle speed
图5 前轮转角为5.7°时转向半径随车速的变化曲线Fig.5 The relationship of turning radius and vehicle speedwhen the turning angle of the first wheel is 5.7°
由图5可知,车轮转角一定时,车辆转向半径随车速增加而增加。
图6 横摆角速度增益随车速变化曲线Fig.6 The relationship of yaw angular velocity gainand vehicle speed
由图6可知,在全地面起重机的行驶速度范围内,横摆角速度增益随车速提升先增加后趋于平稳,高速时呈现出不足转向的趋势。
图7 侧倾角增益随车速变化曲线Fig.7 The relationship of roll angle gain and vehicle speed
图7所示,侧倾角增益随着车速提升而增加,而在车速不超过15 km/h时曲线斜率较小。
5 结论
结果显示,轴间距的布置、各轴车轮侧偏刚度、各轴质量以及整车质心位置对多轴全地面起重机稳态转向特性影响很大。合理考虑多轴全地面起重机的机构布置,使质心位置适当前移,可提高其不足转向特性;多轴全地面起重机转向中心车身投影点之后参与转向的轴越多,不足转向特性明显。增大转向中心投影点之后各轴轮胎侧偏刚度,降低投影点之前各轴轮胎侧偏刚度,有助于增强不足转向特性。
稳态侧倾角增益在车速较低的情况下(u≤15 km/h)变化幅度较小,说明在低速稳态转向时,车身姿态变化不大。在高速时,车身姿态与车速的提升呈线性增长关系。
多轴全地面起重机横摆角速度增益在高速转向时趋于平稳,横摆角速度变化不大,转向平稳。
[1] 宋志强,史青录.基于零侧偏角控制的大型全路面起重机转向性能的研究[J].建筑机械,2014(1):84-89.
[2] 张俊友,王树凤,李华师.五轴重型全轮转向汽车操纵稳定性分析[J].农业机械学报,2008.39(9):30-34.
[3] 马玉贤,刘中英,贾志绚.基于模糊控制的九桥全地面起重机转向持性[J].太原科技大学学报,2014,39(5):374-379.
[4] 安部正人.车辆操纵动力学[M].北京:机械工业出版社,2012.
[5] DAVE CROLLA,喻凡.车辆动力学及其控制[M].北京:人民交通出版社,2004.
[6] 王云超,陈宁,高秀华.多轴转向车辆侧向动力学分析[J].重庆工学院学报,2009,23(1):6-11.
[7] 余志生.汽车理论[M].北京:机械工业出版社,2009.
Analysis on Steady Steering of Multi-axle All Terrain Cranes
SHAO Bo,SHI Qing-lu,DU Nis,WU De,GE Ming-ci
( School of Mechanical Engineering,Taiyuan University of Science and Technology,Taiyuan 030024,China)
A 3-DOF multi-axle steering vehicle model is established by using Lagrange analysis method.Based on mass center zero-slip-angle control strategy,the equations of the distance between the mass center and the turning center,the yaw angular velocity gain and the roll angle gain can be obtained.Evaluation indicators are also shown.This study discusses the turning characters of multi-axle vehicles and analyzes the parameters that influence the turning characters,which can provide useful information for the design of multi-axle all terrain cranes.
all terrain crane,multi-axle steering ,yaw angular velocity gain
1673-2057(2015)01-0049-05
2014-11-20
邵波(1988-),男,研究生,主要研究方向为机械与车辆动力学。
TH213.6
A
10.3969/j.issn.1673-2057.2015.01.010
