非线性指数理论在SRLV动力学建模上的应用
2015-03-23程超穆荣军韦常驻黄盘兴
程超,穆荣军,韦常驻,黄盘兴
(哈尔滨工业大学航天学院,黑龙江哈尔滨150001)
亚轨道可重复使用运载器(suborbital reusable launch vehicle,SRLV)是指可以重复使用的,能够自由地往返于太空与地球之间的多用途航天器。由于SRLV的再入返回过程具有飞行包线大,飞行马赫数变化范围大(Ma=1.0~7.0),机动性强(存在空中大调姿转弯),飞行约束强(法向过载、再入攻角和俯仰角及控制量限制),操纵机构复杂(气动舵面和反作用控制系统等多种操纵机构),气动特性复杂(飞行高度和速度的过大变化使得气动参数变化剧烈),不确定性强等特点,使得动力学建模、气动计算和飞行控制等问题成为SRLV领域内的研究热点和难点。其中SRLV动力学模型的建立和分析是重要分系统之一,也是SRLV能够安全可靠地飞行并完成既定任务的重要保证[1]。
线性理论一直是SRLV动力学建模和分析的首要选择,然而这种把非线性系统模型近似化的线性方法,需要一定的假设条件,并受到特定的约束和限制。在 SRLV再入返回过程中,由于SRLV具有强动力学耦合、气动耦合、惯性耦合和超机动等特性,一些假设和限制条件不一定成立,SRLV的动力学模型不能简单的近似为一个线性模型,只能作为非线性系统进行设计与分析[2]。但是相对于线性系统来说,基于非线性系统的动力学建模和控制系统设计具有很多的局限性,例如需要模型足够精确。已经有很多成熟的方法可以解决飞行器的非线性动力学建模与分析问题[3]。在应用这些方法之前,就需要考虑非线性系统设计带来的困难与线性处理带来的误差之间的协调关系,这就引入了一个重要的问题—“飞行器动力学系统的非线性程度有多少”。如果一个系统的非线性程度很弱的话,可以采用近似线性化的方法进行动力学的建模与分析,但当一个系统具有强非线性和耦合性时,就需要更加复杂的非线性理论进行模型的建立和分析了。在国外,Junkins等[4]首先提出了非线性指数理论,并应用于判断不同轨道坐标的选取引起的非线性。Orman等[5]以F-16为模型,研究了非线性指数理论在飞行器动力学模型分析上的应用。
本文首先详细分析了非线性指数基本原理和方法,然后将其拓展应用到飞行器动力学模型,最后结合SRLV再入过程的特性,以静态和动态非线性指数分析了SRLV再入返回过程的非线性程度。
1 非线性指数原理
定义一个非线性模型为

式中:f(x)是可微的向量函数,x∈Rn,y∈Rm。

由Δxmax限定的区域是以为中心,Δxmax为半径的一个区间。此区域通过式(1)映射成不同形状,形成变量y的取值范围,如图1所示。这个映射过程,可能是线性变化的,也可能是非线性的,变量y的线性近似表达式为[5]

图1 二维非线性映射Fig.1 Two-dimensional nonlinear mapping
在邻域‖Δx‖≤Δxmax的范围内,非线性模型的线性近似程度,可以通过A的偏差量来计算:

式中:‖·‖为弗罗贝尼乌斯范数。
非线性指数NI是无量纲量。当非线性指数NI<10-2时,即小于“1%”的系统非线性,意味着在邻域范围内,x到y的映射过程中,式(2)的非线性不明显;当NI≥1时,代表系统已经“100%”偏离了线性化估计。
将非线性模型扩展为一个状态空间模型为

式中:x∈Rn为状态矢量,u∈Rr为输入矢量,y∈Rm为输出矢量,为系统矩阵,为输入矩阵,为输出矩阵,为直接传递矩阵。
对式(5)进行线性化,得


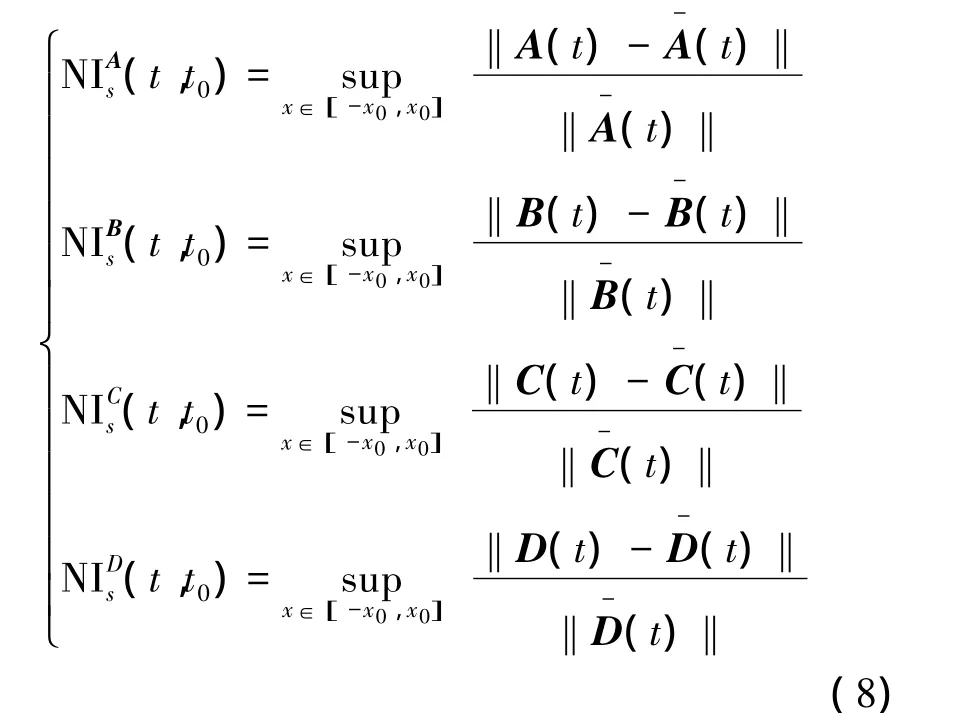
4个动态非线性指数为

静态和动态非线性指数不仅能够系统量化状态空间模型的非线性程度,还表明了状态空间模型非线性的来源,即初始状态引起的非线性。
2 SRLV动力学模型
亚轨道可重复使用运载器是垂直发射,与上面级分离后,通过翻转进行姿态调整,将速度和姿态角等因素调整到合适的再入条件,返回原发射场。
SRLV再入段,对纵向运动可以进行调整的执行机构有:1)阻力板,参与俯仰控制,再入过程中一般为定值;2)体襟翼,机身尾段凸出部分,可作为升降舵使用,参与俯仰控制[1]。
本文仅研究可重复使用运载器再入段的纵向运动,为了简化分析,假定侧向无运动,侧向运动参数为零,纵向非线性运动方程为

式中:V为飞行器的飞行速度,ωz为本体坐标系相对于发射坐标系的转动角速度在本体系z轴上的分量,α为攻角,ϑ为俯仰角,Iz为转动惯量,δz为操纵机构,q为动压,S为特征面积,l为特征长度,g为重力加速度,cx为阻力系数,mz(ωz)为滚转阻力力矩系数,在工程计算中可以认为是一个常值,cy(α)和cy(δz)分别为攻角和舵偏引起的升力系数,mz(α)和mz(δz)分别为攻角和舵偏引起的俯仰力矩系数[7]。
3 SRLV非线性度分析
3.1 气动特性
从式(10)可以看出,SRLV纵向运动模型的非线性强弱主要取决于气动参数的变化。文献[8]给出了X-34的气动参数变化,采用神经网络来拟合气动力和气动力矩系数。在工程上,一般通过风洞试验,测得不同攻角和马赫数下的气动数据[9]。SRLV在距离地面35 km开始再入飞行,α的取值范围为[ -10°,35°],Ma的取值范围为[1.0,7.0],δz的取值范围为 [ -30,30]。随着攻角和马赫数的变化,阻力系数cx、升力系数cy(α)和δz=-20升力系数cy(δz)的变化曲线如图2~4所示。
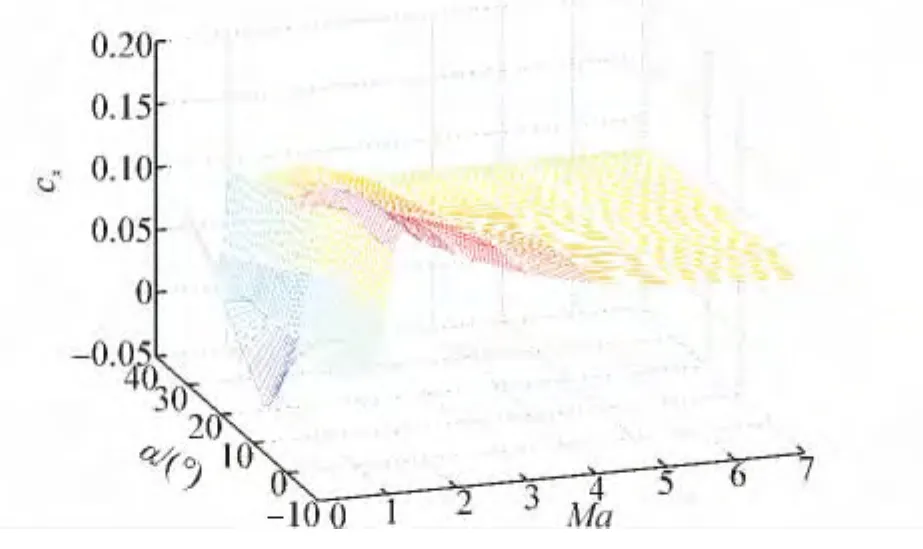
图2 阻力系数变化曲线Fig.2 Resistance coefficient curve

图3 升力系数变化曲线Fig.3 Lift coefficient curve

图4 δz=-20升力系数变化曲线Fig.4 Lift coefficient curve at δz=-20
从图中可以看出,当Ma<3时,阻力系数、升力系数呈现不规则变化,非线性较强。这种情况符合工程实际,在低马赫数时,空气是不可压缩的介质,随着马赫数的增加,压缩性的影响就逐渐显著起来,气动系数的变化逐渐趋于平缓。
3.2 SRLV非线性度分析
经过雅克比线性化后,可以将式(10)的线性模型为

其中:


矩阵A和B中的微分量可表示为

在特征点 j的一定范围内,有 xi=xj+Δx,‖Δx‖≤Δxmax,4个测量系统(12)非线性程度的非线性指数表达式为



图5 静态非线性指数Fig.5 Static nolinearity index

图6 静态非线性指数Fig.6 Static nonlinearity index
选取参考变量λ=[Ma,α],将α和Ma组成的飞行包线分解成网格点集j=1,2,3,…,在每个点j处,模型(11)的状态矩阵为Aj,输入矩阵为Bj。围绕点j,定义α和Ma总变化范围20%的子区域。在子区域内,确定一个点集i=1,2,3,…,并产生相应的线性系统 { Ai,Bi},直接应用式(12)计算线性模型(11)的非线性强度变化曲面,如图5~8所示。

图7 动态非线性指数Fig.7 Dynamic nonlinearity index

图8 动态非线性指数Fig.8 Dynamic nonlinearity index
动态非线性指数不仅是参考向量的函数,还与时间有关。时间t=0.1 s,动态非线性指数如图7、8所示。在动态非线性指数曲线的左侧区域有跳变,这说明模型在该区域内不稳定。静态非线性指数与动态非线性指数较为相近。这说明t取值较小时,动态非线性指数趋向于静态非线性指数。
4 结论
针对亚轨道可重复使用运载器再入返回过程,考虑到其飞行包线广和气动参数变化大等不利因素,本文运用非线性指数理论和方法拓展应用于飞行器动力学分析上,推导并提出了用于测量全飞行包线内动力学模型非线性程度的非线性指数表达式。结合SRLV再入过程的气动特性,对SRLV动力学模型的非线性程度进行了仿真验证和分析,仿真结果可以看出大攻角和仿真时间的增加对非线性指数有很大影响,使SRLV动力学系统表达出强非线性特性。本文所得的结论可为强非线性程度的飞行器控制系统的设计提供更多参考。
[1]许江涛.可重复使用助推飞行器姿态控制和控制分配研究[D].哈尔滨:哈尔滨工业大学,2010:1-20.
XU Jiangtao.Research on attitude control and control allocation for reusable boosted vehicle[D].Harbin:Harbin Institute of Technology,2010:1-20.
[2]ARNOLD S P,SMITH H.Suborbital flights for space science[C]//AIAA Space 2013 Conference and Exposition.San Diego,CA,2013:2013-5350.
[3]CARROLL J V,MEHRA R K.Bifurcation analysis of nonlinear aircraft dynamics[J].Journal of Guidance,Control,and Dynamics,1982,5(5):529-536.
[4]JUNKINS J L,SINGLA P.How nonlinear is it?A tutorial on nonlinearity of orbit and attitude dynamics[J].The Journal of the Astronautical Sciences,2004,52(1/2):7-60.
[5]OMRAN A,NEWMAN B.Full envelope nonlinear parameter-varying model approach for atmospheric flight dynamics[J].Journal of Guidance,Control,and Dynamics,2012,35(1):270-283.
[6]CHENG Chao,MU Rongjun.Non-spinning missile dynamic assessment using nonlinearity index theory[C]//IMCCC 2014-0108,The Fourth International Conference on Instrumentation&Measurement,Computer,Communication and Control.Harbin:Harbin Institute of Technology,2014:IMCCC 2014-0108.
[7]PAMADI B N,BRAUCKMANN G J,RUTH M J,et al.Aerodynamic characteristics,database development,and flight simulation of the X-34 vehicle[J].Journal of Spacecraft and Rockets,2001,38(3):334-344.
[8]BRAUCKMAN G J.X-34 vehicle aerodynamic characteristics[J].Journal of Spacecraft and Rockets,1999,36(2): 229-239.
[9]ELLSWORTH J C,WHITMORE S A.Reentry air data for a sub-orbital spacecraft based on X-34 design[C]//45th AIAA Aerospace Sciences Meeting and Exhibit.Reno,Nevada,2007.
[10]MU Rongjun,CHENG Chao.Controller design of complex system based on nonlinear strength[J].Mathematical Problems in Engineering,2015:523197.
