尾桨转速对旋翼转速优化直升机操稳特性的影响
2015-03-15徐明李建波韩东
徐明, 李建波, 韩东
(南京航空航天大学 直升机旋翼动力学国家级重点实验室, 江苏 南京 210016)
尾桨转速对旋翼转速优化直升机操稳特性的影响
徐明, 李建波, 韩东
(南京航空航天大学 直升机旋翼动力学国家级重点实验室, 江苏 南京 210016)
基于状态空间法建立了直升机的全量方程,通过计算直升机对航向操纵的脉冲响应及横向稳定性特征根,分析了两种尾桨转速方案对旋翼转速优化直升机的横航向操稳特性的影响。计算结果表明,与尾桨转速不随旋翼转速变化方案相比,虽然尾桨转速随旋翼转速联动时的直升机横航向操纵性减小了一些,稳定性也轻微降低,但差异较小。因此综合比较功率节约和结构减重的优势,可以确定转速联动方案更适用于旋翼转速优化直升机。
转速优化; 尾桨转速; 稳定性; 操纵性
0 引言
长航时无人直升机用于对任务区域实施长时间的侦察、监视、目标捕获和对地攻击等任务,可以不受人机环境的限制,既可以作为信息中继或远距离侦查攻击一体化的飞行平台,也可以与监控卫星相搭配,构建空天信息网络,具有突出的综合任务效能。美国A-160旋翼转速优化直升机[1]可以根据飞行需要改变旋翼转速,降低需用功率、提高飞行效能,还可以通过降低结构质量,增加燃油附带量,使直升机长航时飞行成为可能。
与常规直升机相比,旋翼转速优化直升机的旋翼转速是可变的,并且最大变化范围可达50%[2]。因此旋翼转速优化直升机的尾桨转速设计又增加了另外一种方案,即旋翼转速优化直升机的尾桨转速有两种形式可供选择:一种是与旋翼转速等比例联动,另外一种是保持尾桨转速固定不变,不随旋翼转速变化而变化。从结构系统设计的角度而言,旋翼转速优化直升机的尾桨转速设计方案更倾向于尾桨转速与旋翼转速联动。这是因为旋翼转速优化直升机是以降低旋翼转速为手段[3-4],减小需要功率与耗油率,以达到增加航时(航程)的目的[5];因此当尾桨转速与旋翼转速等比例降低时,不仅可以减少尾桨功率,还可以避免增加额外的减速机构。减小了直升机的结构质量,对增加直升机的最大飞行时间是有利的,但长航时无人直升机的远距离、超长滞空时间的飞行特点,又给直升机的操纵性及稳定性提出了一定的要求;因此采用不同尾桨转速设计方案是以不影响直升机稳定飞行为提前的。
尾桨是影响直升机横航向操纵性及稳定性的主要气动部件,选用不同尾桨转速设计方案会影响直升机的操纵性及稳定性。本文根据叶素理论计算旋翼及尾桨气动力,采用风洞吹风试验数据计算机身及垂尾的气动力,以状态空间法建立了直升机的全量方程,采用小扰动假设将全量方程线性化;最后通过求解直升机的横向运动方程,得到直升机的航向传递函数及横向稳定性特征根,以此分析不同尾桨转速方案下的直升机操纵性及稳定性。
1 计算方法与验证
本文算例为美国A-160“蜂鸟”无人直升机。该直升机采用了无铰式旋翼,桨叶挥舞刚度较大,且没有平尾,因此本文建立的直升机飞行动力学模型包括旋翼、尾桨、机身及垂尾4个气动部件,其基本参数为:最大起飞质量2 000 kg;旋翼桨叶4片,旋翼半径5.5 m,弦长0.35 m;跷跷板式尾桨半径1.05 m,弦长0.205 m;垂尾面积0.52 m2。
根据Pitt-Peters一阶谐波动态入流理论,旋翼桨盘诱导速度谐波分量由如下一阶微分方程确定:
(1)
式中:CT,CL,CM分别为旋翼拉力、俯仰和滚转力矩系数;A,B为矩阵系数。
本文将无铰式旋翼等效为桨根带挥舞弹簧刚度的铰接式旋翼[6],因此桨叶的纵横向挥舞角仍然可以由如下二阶微分方程确定:
(2)
根据桨叶剖面的迎角和马赫数,结合翼型风洞试验数据得到桨叶不同微段的升力系数和阻力系数,因此叶素的升力和阻力分别为:
(3)
对于旋翼构造轴系,该叶素产生的垂向力、切向力和径向力分别为:
(4)
将叶素气动力沿径向和周向积分,求其平均值,再乘以桨叶片数,即可得到旋翼气动力和力矩。
同样采用叶素法计算尾桨的拉力和扭矩,其中入流采用均匀入流模型,同时根据风洞试验数据计入机身、垂尾的气动特性,而旋翼对机身、尾桨、垂尾的下洗系数由文献[7]中的公式确定:
k=1.299+0.671χ-1.772χ2+0.351χ3
(5)
式中:χ为旋翼尾迹倾斜角。
为了检验所用模型的准确性,本文通过求解机体六自由度刚体平衡方程,计算得到起飞质量为1 500 kg,不同旋翼转速下的总距值,并与文献[8]中的计算值作比较,结果如图1所示。虽然本文没有考虑桨叶弹性变形造成两者数值在前飞速度大于150 km/h后出现的偏差,但总体上较为接近,表明本文建立的气动模型较为准确,可用于旋翼转速优化直升机飞行动力学特征分析。
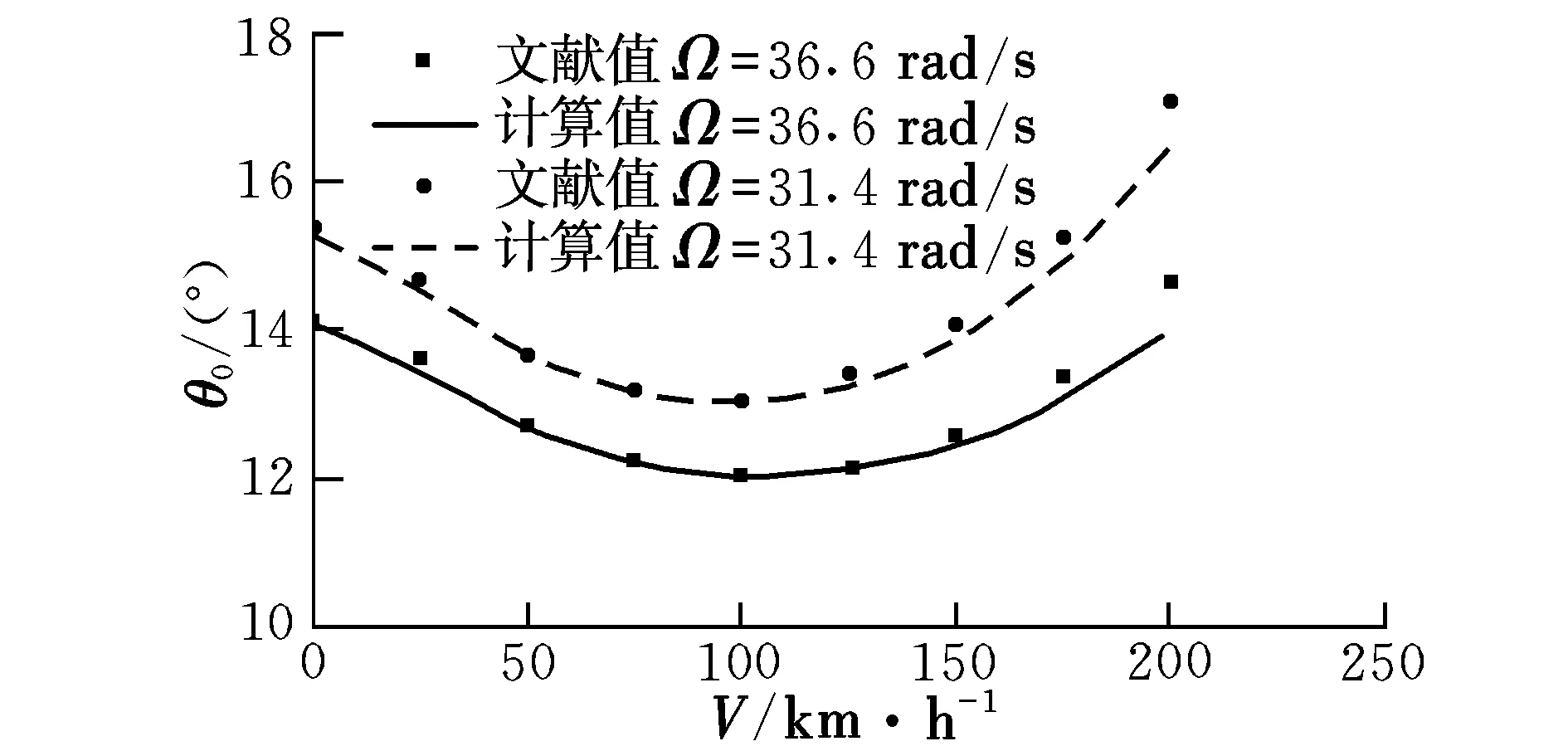
图1 直升机总距计算对比Fig.1 Collective pitch varies with forward speeds
在计算得到直升机所有部件的气动力后,按状态空间法构建直升机的非线性全量方程:
(6)
上述方程组包含3个力平衡方程、3个力矩平衡方程以及3个运动学方程;状态向量X包含了直升机的运动速度、角速度及姿态角;控制向量U则包含4个控制输入。对直升机的全量方程进行线性化,可以得到直升机的气动导数和操纵导数。
本文分别计算了尾桨转速和旋翼转速等比例变化(方案1)及尾桨转速固定不变(方案2)对直升机操纵性、稳定性的影响,其中旋翼及尾桨转速在悬停及巡航状态时的量值如表1所示,其中6.11为比例系数。
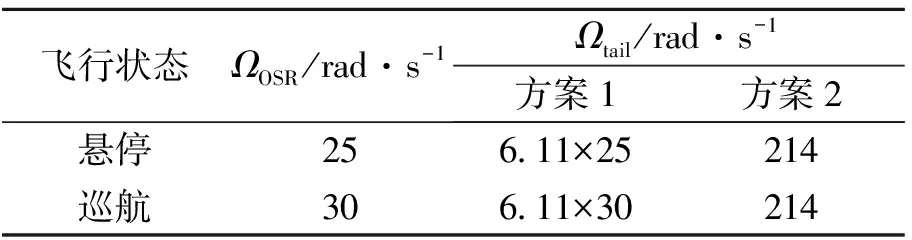
表1 旋翼及尾桨转速Table 1 Speed of rotor and tail rotor
2 操纵性分析
由于尾桨转速的大小将会影响直升机的操纵导数,进而改变直升机的横航向操纵性。本文通过研究直升机对尾距操纵响应及航向带宽来分析不同尾桨转速方案时的直升机操纵性,将直升机的横航向运动方程从线性化全量方程中分离出来,可以得到直升机偏航通道运动方程[9]:
(7)
对上式进行拉普拉斯变换,得到直升机偏航角速度对尾桨总距的传递函数。根据传递函数可以画出直升机对航向操纵的脉冲响应图,以及航向通道Bode图。本文计算并获得了直升机在悬停及巡航状态(120 km/s)的脉冲响应及Bode图,结果如图2~图4所示。
从图2可以看出,在20 s内,当采用方案1时,偏航角最大响应值仅为70°,倾侧角最大响应值为-0.7°;方案2的偏航角最大响应值为100°,倾侧角的最大响应值为-1°。通过对比可以看出,在悬停状态下,两种尾桨转速设计方案对直升机操纵性的影响主要体现在航向,而对横向操纵性的影响不明显。虽然采用方案2时直升机的航向操纵性要优于方案1,但采用尾桨转速随旋翼转速联动方案时,直升机偏航角在4 s左右就能达到70°,表明此设计方案的航向操纵性也较为理想。
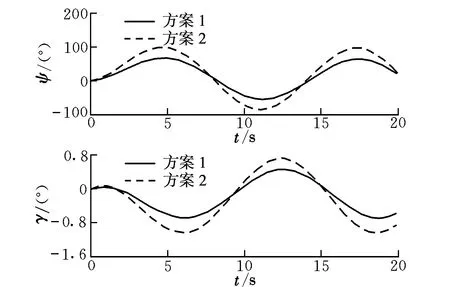
图2 直升机悬停时对航向操纵的脉冲响应Fig.2 Impulse response for heading control in hover
图3为直升机巡航状态时的偏航角、倾侧角脉冲响应。可以看出:在20 s时间内,采用方案1时的偏航角最大响应值为32°,倾侧角最大响应值为-30°;方案2的偏航角最大响应值为37°,倾侧角最大响应值为-35°。结果表明,尾桨转速固定时的直升机横航向操纵性要优于尾桨转速随旋翼转速联动时的情况,但这种优势不是很明显。
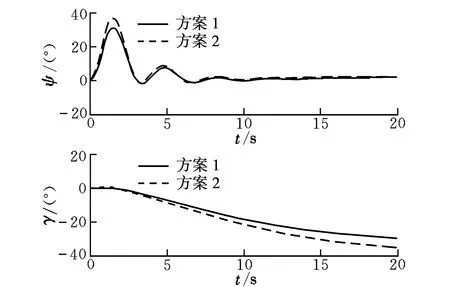
图3 直升机巡航时对航向操纵的脉冲响应Fig.3 Impulse response for heading control in cruising
图4为两种尾桨转速设计方案时的航向通道Bode图。可以看出:在巡航状态下,采用方案1时的相位带宽为2.36 rad/s,增益带宽为3.41 rad/s,滚转通道的延迟时间为τp=0.056 s;而采用方案2时的相位带宽为2.45 rad/s,增益带宽为3.45 rad/s,滚转通道的延迟时间为τp=0.057 s。带宽反映了直升机对高频操纵的反应能力,而响应滞后时间表示从操纵输入到直升机开始响应的时间间隔。通过计算表明,采用两种尾桨转速设计方案的直升机带宽及响应延迟时间基本一致,其中尾桨转速固定不变时的直升机带宽略大一些。
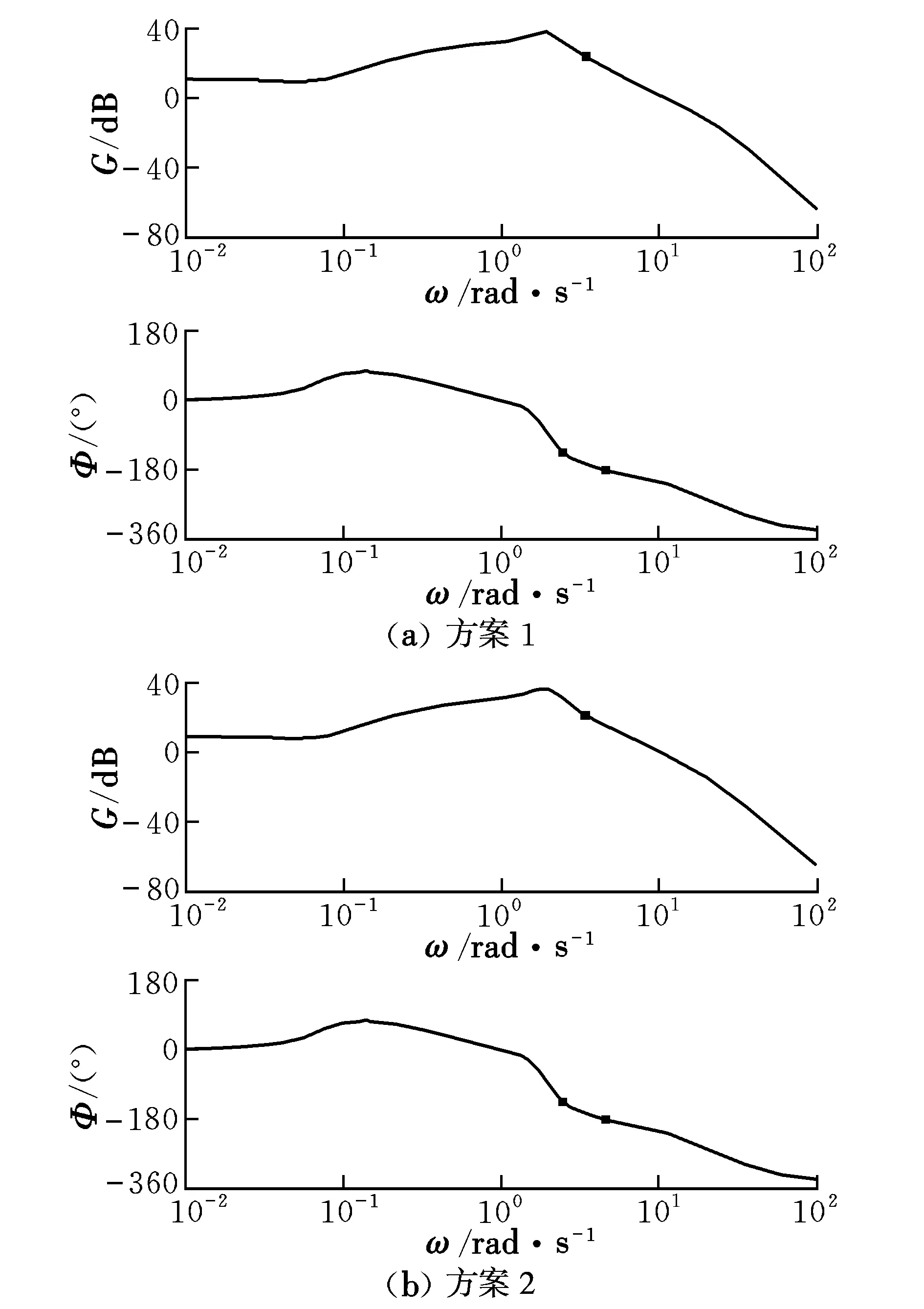
图4 直升机巡航时航向通道Bode图Fig.4 Bode diagram of heading channel in cruising
3 稳定性分析
通过求解式(7),得到直升机的横向特征根,根据特征根可以分析直升机的稳定性。算例直升机在悬停及巡航状态时的根轨迹如图5和图6所示。
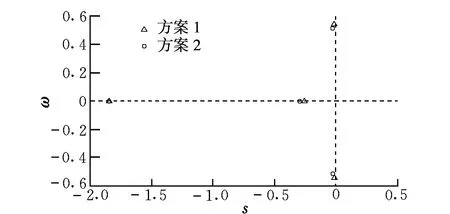
图5 悬停时横向特征根Fig.5 Lateral characteristic root in hover
从图5可以看出:两种尾桨转速设计方案下的直升机旋翼横航向运动模态基本一致,其中滚转模态特征根完全一样;而尾桨转速不变时的直升机螺旋模态、横侧运动模态稳定性都略优于尾桨转速变化时的稳定性。表明在悬停状态下,样例直升机的刚性旋翼提供了较大的阻尼,两种尾桨转速设计方案带来的横航向稳定性差异不大。
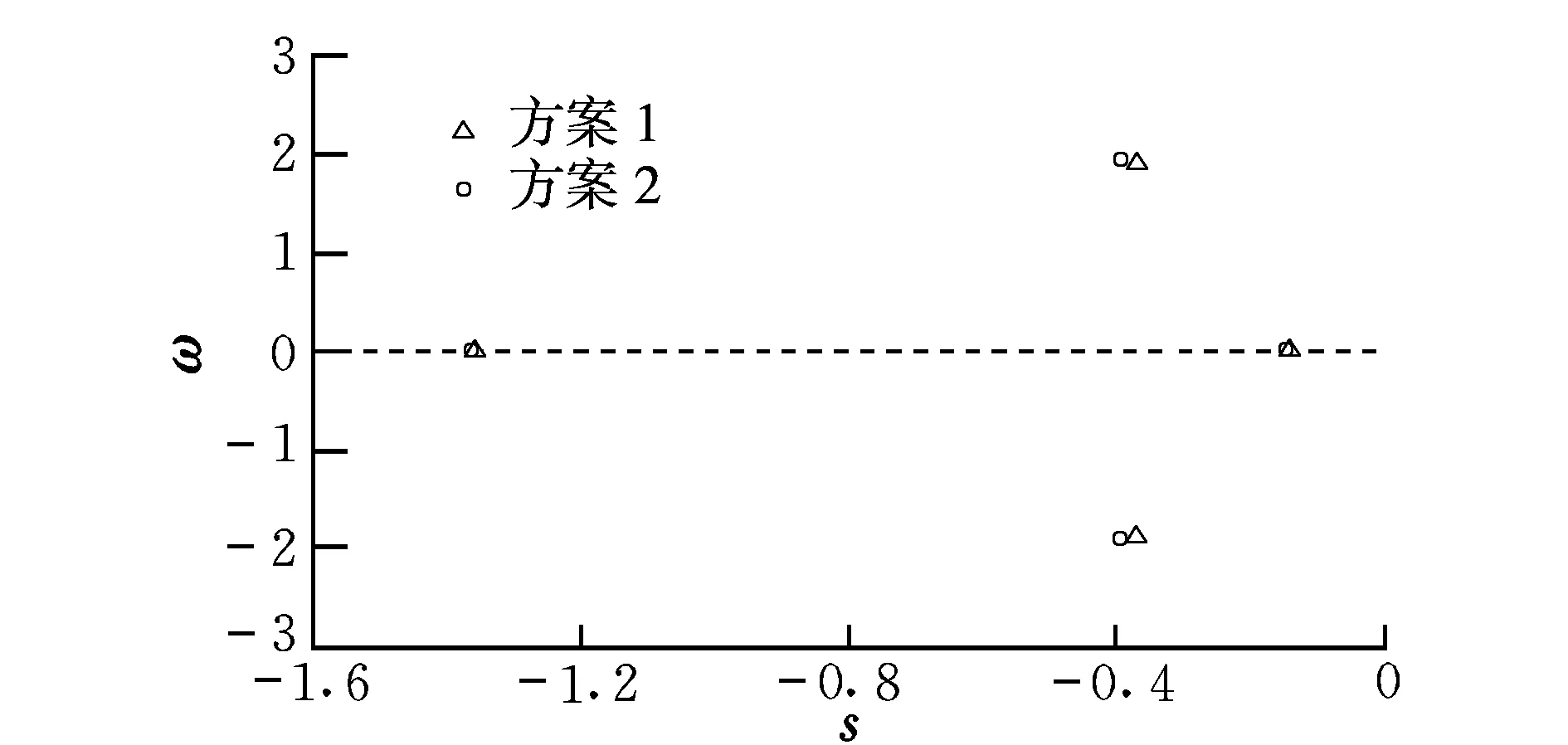
图6 巡航时横向特征根Fig.6 Lateral characteristic root in cruising
如图6所示,在直升机巡航状态,两种尾桨转速设计方案对横航向稳定性的影响差异主要表现在直升机的荷兰滚模态上,虽然尾桨转速不变时的荷兰滚稳定性更好,但其荷兰滚周期为3.26 s,而尾桨转速变化时的荷兰滚周期则为3.33 s。总体而言,两种尾桨转速设计方案对直升机的横航向稳定性影响差异较小。这是因为在巡航状态时,直升机的横航向稳定性由旋翼、垂尾与尾桨共同决定,而样例直升机的无铰式刚性旋翼又提供了较大的阻尼。虽然尾桨转速设计方案1时的转速较低,但尾桨总距是增加的,产生的尾桨侧向力也没有改变很大;因此设计方案1和设计方案2对直升机的气动导数的影响基本一致。
在不考虑方案1对减轻直升机结构质量的情况下,根据配平后的旋翼及尾桨扭矩计算了不同尾桨转速设计方案时的旋翼转速优化直升机的需用功率,计算结果如图7所示。
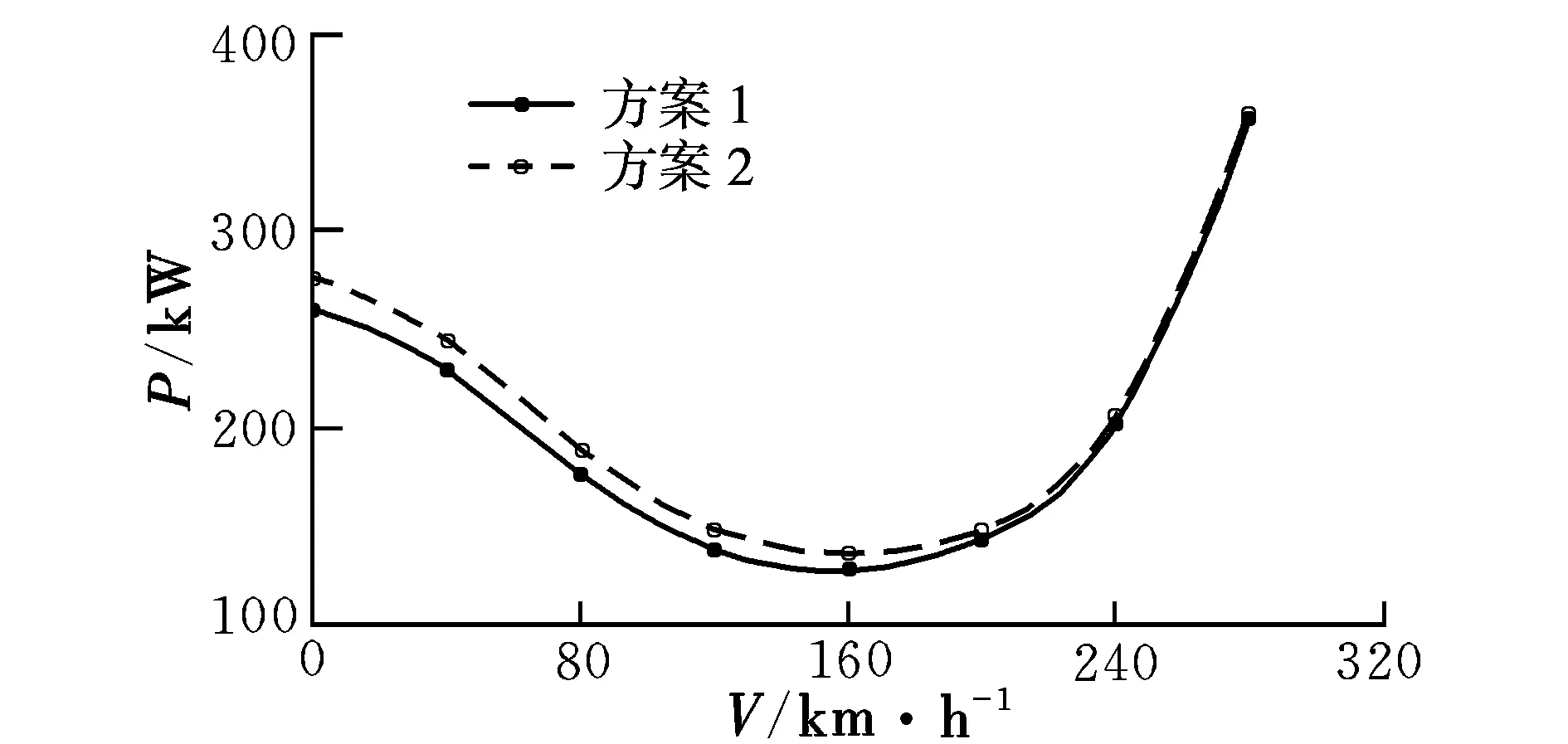
图7 直升机需用功率Fig.7 Required power of helicopter
从图中可以看出,在小速度及中等速度时,尾桨转速设计方案1比方案2可以使直升机需用功率减小6%左右,如果考虑采用方案2给直升机带来的结构质量,方案1对增加旋翼转速优化直升机最大航时的优势将更加明显。
4 结束语
本文通过从全量方程中分离出横航向运动方程,得到直升机对航向操纵的传递函数及横向特征根,分析了不同尾桨转速设计方案下的直升机横航向操纵性及稳定性。通过对比发现,虽然尾桨转速随旋翼转速变化方案在操纵性及稳定性上都不及尾桨转速不变方案,但这种差距是很小的,通过无人直升机的飞控系统是完全可以弥补的。综合考虑尾桨转速随旋翼转速变化的方案对整个直升机需要功率的减小,以及传动系统设计上都有很大的优势,因此可以确定尾桨转速随旋翼转速联动的设计方案更适用于旋翼转速优化直升机。
[1] James DiOttavio,Friedmann D.Operational benefits of an optimal widely variable speed rotor[C]//The 66th AHS Forum.Phoenix,AZ,2010.
[2] Prouty R W.Should we consider variable rotor speeds[J].Vertiflite,2004,50(4):24-27.
[3] Karem A E.Optimum speed rotor:US,60/075,509 [P].2001-5-10.
[4] 徐明,韩东,李建波.变转速旋翼气动特性分析及试验研究[J].航空学报,2013,34(9):2047-2056.
[5] Steiner J,Farhan G.An investigation of variable rotor RPM on performance and trim[C]//The 64th AHS Forum,Montreal.Canada,2008.
[6] 张呈林,王华明.旋翼结构参数及动力学参数对直升机操纵稳定性的影响研究[J].南京航空航天大学学报,1995,27 (4):445-453.
[7] 吕少杰,曹义华,李国知.气动布局参数对直升机飞行品质的影响[J].北京航空航天大学学报,2013,40(4):54-58.
[8] 韩东.变转速旋翼直升机性能及配平研究[J].航空学报,2012,34(6):1241-1248.
[9] 高正,陈仁良.直升机飞行动力学[M].北京:科学出版社,2010.
(编辑:李怡)
Effect of tail rotor speed on controllability and stability of OSR helicopter
XU Ming, LI Jian-bo, HAN Dong
(National Key Laboratory of Rotorcraft Aeromechanics, NUAA, Nanjing 210016, China)
The equations of motion of the helicopter were derived based on state-space method. The effect of tail rotor speed on controllability and stability of Optimum Speed Rotor(OSR) helicopter were analyzed by calculating the impulse response of helicopter and characteristic root of lateral stability. The results show that compared with the tail rotor speed unchanged with rotor speed scheme, although the designs of tail rotor speed changing with rotor reduce the lateral-directional handling performance and stability; the effect is less. Thus, considering comprehensively the advantages of power and structure weight, the design of tail rotor speed changing with rotor is more suitable for OSR helicopter.
optimum speed rotor; tail rotor speed; stability; controllability
2014-04-28;
2014-08-20;
时间:2014-10-24 12:15
国家自然科学基金资助(11202097);江苏省普通高校研究生科研创新计划资助项目(CXLX13_164);中央高校基本科研业务费专项资金资助项目;旋翼动力学国家级重点实验室基金资助(9140C400601120C40157)
徐明(1986-),男,江西湖口人,博士研究生,主要研究方向为直升机总体设计、直升机飞行动力学。
V212.4
A
1002-0853(2015)01-0005-04
