CamShift在加油锥套识别跟踪中的应用
2015-12-25支健辉孔星炜董新民方园王旭峰尹宁宁
支健辉,孔星炜,董新民,方园,王旭峰,尹宁宁
(1.空军工程大学航空航天工程学院,陕西西安710038;2.西安建筑科技大学冶金工程学院,陕西西安710055)
0 引言
近年来,无人机在未来战争中的作用受到越来越多专家、学者的关注[1]。在保持其小型化、机动速度快、维护费用低、生存能力强等优点的基础上,无人机自主空中加油技术可显著延长其留空时间,从而极大地提高有效完成各种作战/非作战任务的能力。因此,自主空中加油技术的相关研究成为国内外军事领域研究热点之一[2-3]。
无人机自主空中加油方式分为硬管式和软管式两种。较之硬管式空中加油,软管式装备质量轻、改装简易、操作相对简单,因此,开展软管式自主空中加油研究在军事领域中具有重大意义[4]。对加油锥套的精确识别和跟踪技术是软管式自主空中加油的关键技术之一,为实现受油机插头与加油机锥套的成功对接提供了有力保障[5]。以往的相对导航系统过多地依赖于GPS和惯性导航元件,在空中加油的近距阶段,GPS信号容易因机体的遮挡而失真。随着先进光学传感器的迅猛发展,通过机器视觉测量解算锥套空间位置已成为该领域的研究热点[6]。因此,研究高精度加油锥套识别跟踪技术对于无人机自主空中加油具有重要意义。
均值漂移(MeanShift)算法是一种较为典型的无参目标跟踪算法,能够实时跟踪非刚性目标,对目标的变形、旋转等有较好的适用性,可以有效提高搜索效率;但其核函数窗宽固定不变,导致跟踪准确性降低,尺度定位失准,甚至丢失目标[7]。CamShift算法是在MeanShift算法的基础上改进而来,其搜索窗口大小可以自适应地进行调整,即根据远离或者靠近受油机时加油锥套的尺寸而自动调整搜索窗的窗宽[8]。
本文着眼于加油锥套的识别跟踪问题,充分考虑了CamShift跟踪算法的优缺点,提出一种基于CamShift的加油锥套识别跟踪算法。通过VC与OpenCV相结合,编写了位置解算程序,并进行了算法的试验验证。
1 锥套识别定位
1.1 特征提取
特征提取[9]是运动目标跟踪的一个重要环节。一般选择一个有区分度的目标特征作为特征提取的标准,如目标的边缘、轮廓或其颜色直方图等;在对复杂目标进行跟踪时,可以联合多种特征进行目标跟踪。本文设计了如图1所示的一种锥套等比例物理模型,锥套端面为红色双环结构,选取颜色和外形两种特征对锥套进行识别。
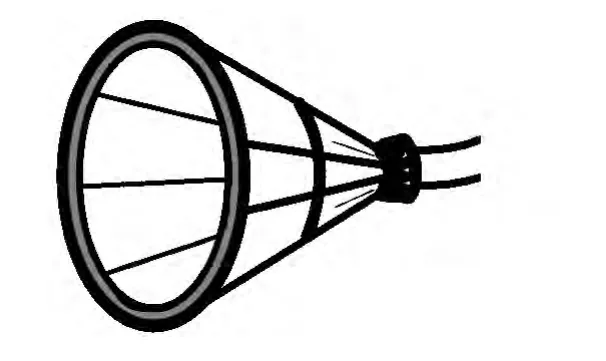
图1 加油锥套模型Fig.1 Drogue model
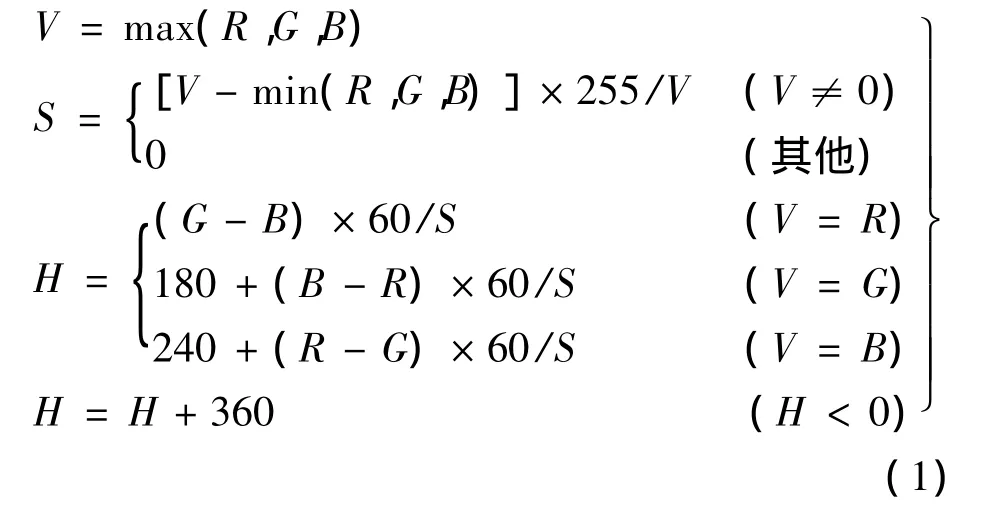
将锥套图像从RGB空间转换到HSV空间进行目标识别。将一般数码相机采集到的图像(即RGB空间图像)转换为HSV空间图像需作如下变换[10]:
1.2 图像分割
在式(1)基础上,对图像中的目标和背景进行分割。考虑天空中阳光和云层干扰的问题,采用自适应阈值分割提升算法的鲁棒性,分割公式为:
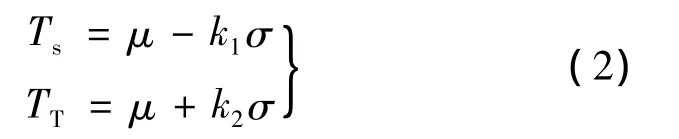
式中:Ts为阴影区域阈值;TT为目标区域分割阈值;μ为图像灰度均值;σ为图像灰度方差;k1和k2为调整因子。则有自适应阈值化规则[11]为:
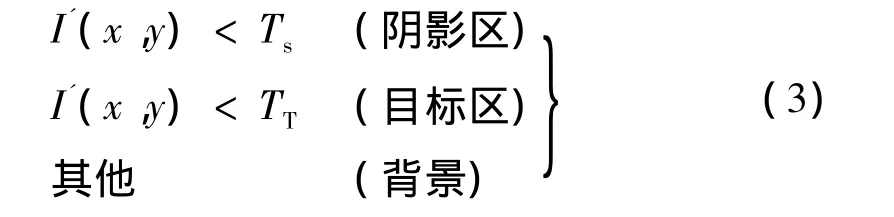
式中:I(x,y)为图像像素值。
1.3 锥套定位
经过图像分割后,对加油锥套的红色双环特征区域的边缘进行最小二乘椭圆拟合[12],得到的双环中心应该重合,拟合得到的两条椭圆曲线中心距离应很小。考虑测量和拟合误差,可设为一个较小值,如5个像素,即初次检测时双环中心距离小于5像素。若双环运动快,图像出现运动模糊,则适当放宽。相对移动速度比较快时,可设双环中心距离小于20像素。
对加油锥套的红色双环特征区域的边缘进行最小二乘椭圆拟合得到的内、外椭圆长轴之比要求在一定范围之内,当内、外椭圆长轴之比为在0.6~0.8范围之内时,即可认为检测到的双环为加油锥套的红色双环特征区域;反之,则认为不是。
2 加油锥套CamShift跟踪算法
2.1 MeanShift算法
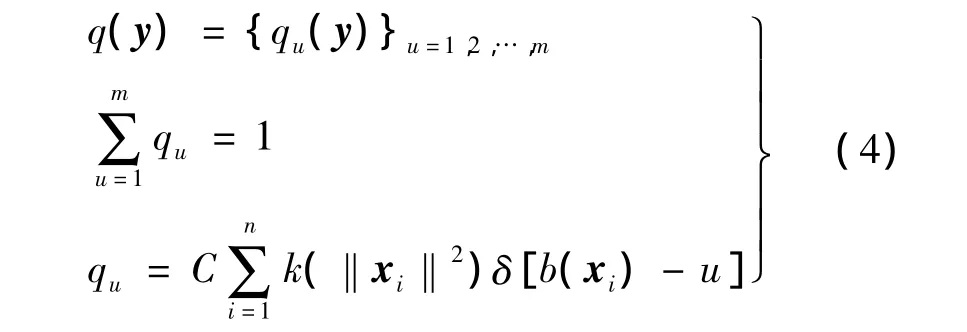
为了描述所跟踪的目标,定义目标模型和候选目标的概率密度函数为[13]:
目标模型:
候选目标:
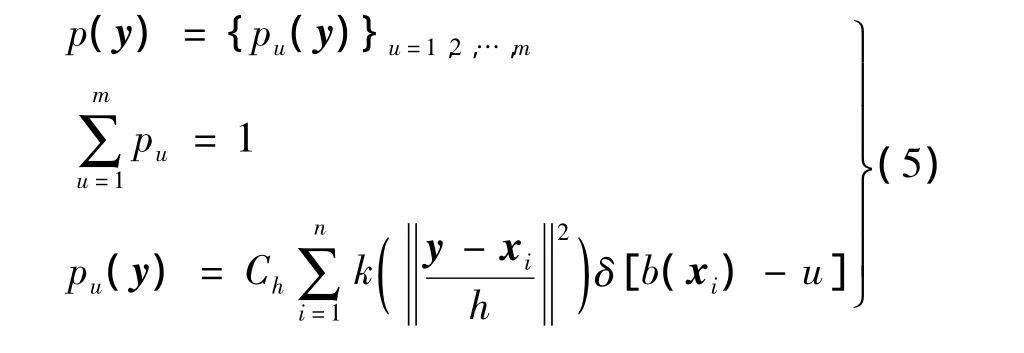
式中:qu,pu(y)分别为锥套目标模型和候选目标的第u级特征概率密度;C,Ch为归一化常数;k(˙)为剖面核函数;δ(˙)为克罗内克δ函数;b为颜色直方图中的索引值;xi为归一化后目标窗口区域的像素坐标;y为“候选目标”的中心;h为核半径。
至此,锥套跟踪的问题转化为匹配这两个概率密度函数的相似性度量问题。使用巴氏系数表征相似性,定义为:

式中:ρ(y)表示上一帧中目标模型概率密度函数和当前帧中以y为中心的候选目标概率密度函数的相似性。以目标模型和候选目标之间的距离作为相似性测度函数的相似性判据,定义如下:

找到当前帧中目标的位置,即求解式(7)中距离的极小值。dis(y)最小化等价于巴氏系数ρ(y)的最大化。在当前帧中搜索目标新位置从前一帧目标的位置y0开始。因此需首先计算候选目标在当前帧中 y0位置处的概率密度函数{pu(y0)}u=1,2,…,m。
对ρ(y)在pu(y0)处进行泰勒级数展开,则ρ(y)可以近似为:
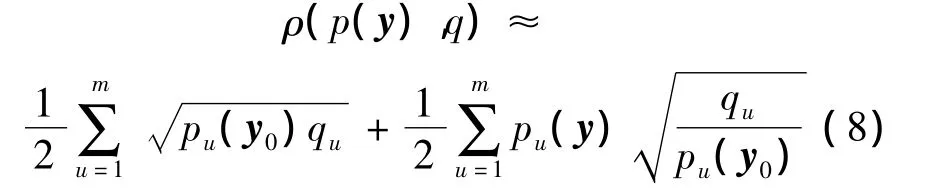
高空中大气紊流、加油机尾涡以及下洗气流对加油锥套影响较弱,目标位置变化范围较小,因此,候选目标{qu(y0)}u=1,2,…,m与目标模型 p(y0)之间几乎没有突变现象,上式的线性关系是可以近似满足的,且通常情况下,相邻两帧中目标会有部分重叠,则在连续的相邻两帧图像中,这种假设条件也是满足的。将式(5)代入式(8)可得:

其中:

为了最小化式(7),由于式(9)右边第一项与y无关,故第二项必须最大化。第二项代表核密度估计,核密度的剖面函数为k(‖˙‖2),样本数据的权重为 wi。对第二项求偏导数,并令其等于零,可得:

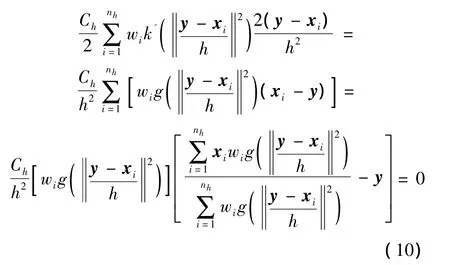
从而得到p(y)最大化的迭代搜索公式:
取核函数为Epanechnikov函数:

其剖面函数如下:
式中:cd为单位d维球体的体积;d为向量τ的维数。当τ为二维向量时,Epanechnikov核函数的剖面函数如下所示:
由于其核函数的剖面函数的导数g(˙)为常数,则式(11)简化为:
反复迭代式(11),使“候选目标”沿着使ρ(y)增大的梯度方向不断移动,直至ρ(y)达到最大,从而实现基于均值滤波的锥套跟踪。
2.2 跟踪窗自适应调整规则
CamShift算法是在MeanShift算法的基础上改进而来,但其在进行目标跟踪过程中一般只针对均值漂移向量的方向对目标位置进行跟踪定位,并不关注目标的实际运动情况,即没有利用目标在空间中的运动方向和运动速度信息。如果出现目标被遮挡或丢失的情况,仅凭颜色信息难以对目标继续精确定位,因此需要在均值漂移算法中加入目标运动信息,保证跟踪效果的稳定性和鲁棒性。
针对上述问题,为了防止目标丢失,本文采用窗宽h自适应调节规则[14]:

式中:α为调节常数;hini为初始搜索窗口宽度;v为目标在像平面的运动速度,即:

式中:ΔT为帧率的倒数;k为当前图像帧数,取值范围为(2,n),其中n为跟踪软件结束时的图像帧数。
目标丢失的另一个主要原因是被其他障碍遮挡,而巴氏系数表征了当前窗口区域直方图与目标直方图的相似度,当目标发生遮挡时,当前窗口区域的巴氏系数将急剧减小。因此,可将目标是否发生遮挡的判据设置为巴氏系数。设定阈值Th,对于图像中的目标区域,有:

根据上述判据,跟踪算法在发现目标发生部分遮挡后即可采取相应的位置估计算法,使跟踪算法在目标发生遮挡后依然可估计目标位置,进行跟踪,直至目标不再被遮挡。
3 试验及结果分析
为了验证本文算法的有效性和准确性,将VC与OpenCV相结合,编写了锥套识别跟踪软件[15]。首先,进行设备的选择以及帧率、视频输出和相关属性项的设置,然后进行试验验证。加油锥套的灰度图像以及H通道图像如图2所示,锥套捕捉定位图像如图3所示。
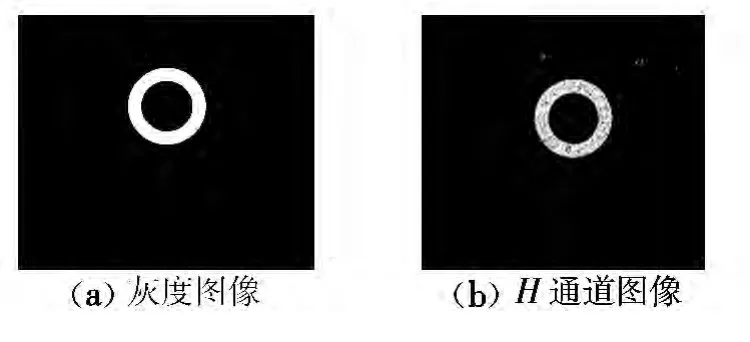
图2 加油锥套图像Fig.2 Drogue image
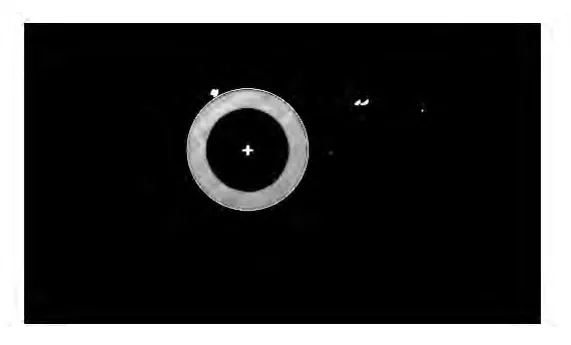
图3 加油锥套定位Fig.3 Drogue location
由图3可知,本文算法得到的目标图像杂光点少,目标中心提取精度高,即使锥套快速运动也无拖影现象,具有良好的实时性。
图4为存在部分遮挡情况下锥套跟踪图像。可以看出,即使在存在部分遮挡的情况下,本文所采用的算法仍然能够精确地提取加油锥套中心点坐标,且达到毫米级定位精度,具有较高的准确性和鲁棒性。
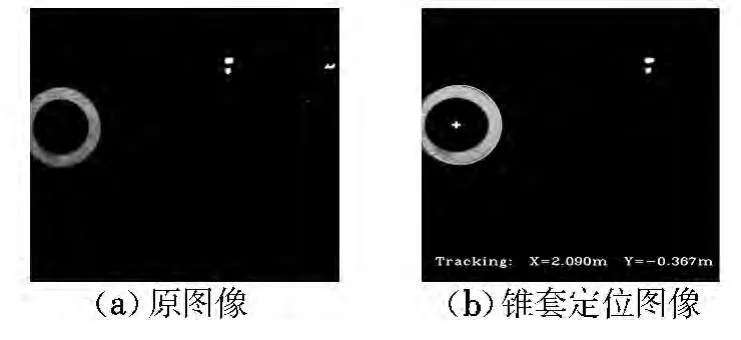
图4 发生遮挡时的锥套跟踪Fig.4 Drogue tracking in partial occlusion
4 结束语
本文提出了一种基于HSV色彩空间的Cam-Shift加油锥套识别跟踪方法。由VC结合OpenCV编写了位置解算软件,算法求解精度高,可达到毫米级,且在目标快速运动或部分遮挡的情况下,仍能较好地解算目标位置。试验结果充分说明了本文算法的实时性、准确性和鲁棒性,能够满足空中加油中导航任务的需求。
[1] 冯琦,周德云.军用无人机发展趋势[J].电光与控制,2003,10(1):9-13.
[2] Nalepka J P,Hinchman J L.Automated aerial refueling:extending the effectiveness of unmanned air vehicles[R].AIAA-2005-6005,2005.
[3] 董新民,徐跃鉴,陈博.自动空中加油技术研究进展与关键问题[J].空军工程大学学报:自然科学版,2008,9(6):1-5.
[4] 慕春棣,李波睿.基于视觉的自动空中加油技术[J].清华大学学报:自然科学版,2012,52(5):670-676,681.
[5] Chen C I,Stettner R.Drogue tracking using 3D flash lidar for autonomous aerial refueling[C]//SPIE Defense,Security,and Sensing.International Society for Optics and Photonics,2011:80370Q-80370Q-11.
[6] Campa G,Fravolini M L,Ficola A,et al.Autonomous aerial refueling for UAVs using a combined GPS-machine vision guidance[C]//AIAA Guidance,Navigation,and Control Conference and Exhibit.Providence,RI,2004:1-11.
[7] Tu Jilin,Hai Tao,Huang Thomas.Online updating appearance generative mixture model for meanshift tracking[J].Machine Vision and Applications,2009,20(3):163-173.
[8] 邬大鹏,程卫平,于盛林.基于帧间差分和运动估计的Camshift目标跟踪算法[J].光电工程,2010,37(1):55-60.
[9] 冈萨雷斯,温茨同.数字图像处理[M].李叔梁,译.北京:北京科学出版社,1981.
[10] Zulkifley M A,Mustafa M M,Hussain A.On improving CAMSHIFT performance through colour constancy approach[C]//Computer& Information Science(ICCIS),2012 International Conference on.Kuala Lumpeu:IEEE,2012:375-378.
[11]倪维平,严卫东,吴俊政,等.MSTAR图像2D Gabor滤波增强与自适应阈值分割[J].光电工程,2013,40(3):87-93.
[12] 韩九强,胡怀中,张新曼,等.机器视觉技术及应用[M].北京:高等教育出版社,2009:170-171.
[13] Tian C,Ge G,Ye S,et al.Researches of scale adaptive Mean Shift target tracking algorithm[C]//Intelligent Control and Automation(WCICA),2010 8th World Congress on.Jinan:IEEE,2010:700-703.
[14]云霄,肖刚.基于Camshift的多特征自适应融合船舶跟踪算法[J].光电工程,2011,38(5):52-58.
[15] Bradski G,Kaehler A.学习 Opencv[M].于仕琪,刘瑞祯,译.北京:清华大学出版社,2009:371-376.
