位置传感器在高旋弹舵机控制系统中应用研究
2015-02-20张进超郝永平张福新
王 玲,张进超,乔 磊,郝永平,张福新
(沈阳理工大学 兵器科学研究中心,辽宁 沈阳 110159)
位置传感器在高旋弹舵机控制系统中应用研究
王 玲,张进超,乔 磊,郝永平,张福新
(沈阳理工大学 兵器科学研究中心,辽宁 沈阳 110159)
高速旋转弹丸弹道修正的实现,修正舵机的减旋和舵机系统中永磁电机的定位检测控制是关键。依据二维修正固定鸭舵工作原理及对永磁同步电机控制方法的研究,采用霍尔传感器进行位置检测的方式实现舵机的修正控制。通过在模拟样机安装霍尔传感器,采用改进的六短时脉冲定位技术,提高舵机的位置检测精度和测速精确性。实验结果表明,该舵机控制系统结构简单,定位精度理想且在高速旋转状态下系统稳定性好、可靠性高,为后续高旋弹二维弹道修正舵机控制系统的研究提供了实验依据。
弹道修正;永磁同步电机;六短时脉冲定位;霍尔传感器;位置检测
高速旋转弹电动舵机修正系统是一个高精度的位置伺服系统。其固定式鸭舵控制器的工作原理是根据电机转子位置检测信息测得舵面偏转的角度,继而触发驱动电路,以驱动直流电动机带动舵机达到修正的目的。二维弹道修正是指对弹丸横向和纵向两个方向均进行修正,主要以横向修正为主,通过改变俯仰力矩和偏航力矩来控制弹丸飞向目标[1];修正舵机减旋是高旋稳定弹丸修正的关键,减旋的目的是提高修正准确度和降低修正难度。有效的电机控制实现弹丸在飞行过程中修正舵机的减旋,在弹丸飞行至修正时段,进一步控制修正舵机的空间姿态来实现弹丸的二维修正[2]。
永磁同步电机具有体积小、功率密度高、动态性能好和转矩/质量比高等性能特点,考虑弹丸内部空间的局限性,选择永磁电机作为控制电机[3-4]。舵机控制系统采用三个开关型霍尔传感器CS3020,安装在互差30°机械角度、输出三路互差电角度120°、占空比为50%的方波信号[5]。当舵机旋转时位置传感器获取高精度的舵片位置信息,解决了高速旋转弹丸减旋时段舵片测速及舵片的减旋。在修正时段位置传感器为弹丸的修正提供精确的舵片位置检测信息,使舵机能根据弹载计算机解算出的修正量控制舵片停止到某一角度达到弹道修正的目的。
1 修正舵机
1.1 鸭舵执行机构工作原理
固定式鸭舵执行机构的工作原理是通过弹体姿态控制指令使舵机带动舵面偏转,从而改变弹体的飞行姿态,并利用空气阻力改变弹丸的飞行速度[6]。
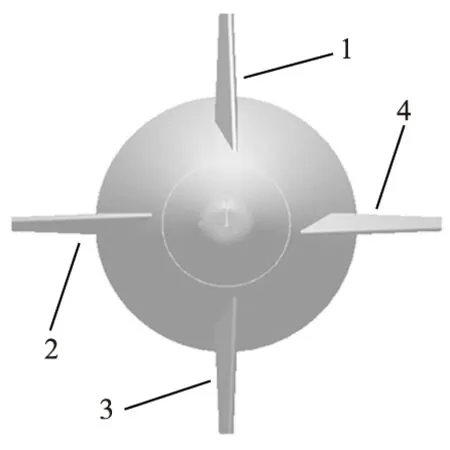
图1 十字鸭舵布局
十字型鸭舵包含一对操纵舵和一对偏航舵,如图1所示,其中1号舵片和3号舵片以某一固定的舵偏角同向平行安装,称为操纵舵。当需要修正时,舵机会根据弹载计算机的控制指令控制1号舵片和3号舵片的位置,使其为弹丸提供相应的飞行控制力。2号舵片和4号舵片为一对以某一舵偏角反向差动安装的舵片,称为偏航舵。其作用是在弹丸处于无控飞行阶段,为弹体头部提供与弹丸旋转方向相反的力矩,偏航舵的偏角为4°,弹丸在飞行中空气阻力作用在舵片上,可以分解为法向力Fc和侧向力Fd(见图2)。其中Fc控制舵片的旋转进而控制弹丸的偏航,Fd控制弹丸的射程。通过对鸭舵的精确控制能够实现高速旋转弹的二维修正。

图2 偏航舵受力分析示意图
1.2 舵机结构组成及控制方法
固定式鸭舵修正舵机主要由固定鸭式舵片、姿态测量与导航装置、永磁电机控制系统等组成,如图3所示。

图3 修正舵机控制系统实物图
舵机修正系统的控制方法基于减旋理论,解决了旋转稳定弹飞行过程中因旋转速度过快而使舵机无法有效控制的问题。弹丸发射后,通过霍尔传感器测得舵片旋转速度,进而调节PWM(脉冲宽度调制)波形占空比使电机产生适当的转矩,保证整个弹体高速旋转状态下舵片仍能保持低速旋转状态,使舵机正常工作不受弹体转速的限制,从而达到高速旋转弹修正舵机的减旋,弹丸二维修正得以实现。
2 霍尔位置传感器
2.1 霍尔传感器安装
在永磁同步电机定子的适当位置安装3个开关型霍尔传感器,在确定霍尔元件间隔距离时,应以电角度为单位,须转换为机械角度才能在无刷直流电动机中安装[7-8]。这个机械角的大小与传感器转子充磁的磁极对数有关,可由下式计算:
(1)
式中: α为机械角;β为电角度;ρ为传感器转子充磁极对数。设计电机极对数为4,当霍尔元件间隔120°电角度时,经计算霍尔元件的相隔机械角度为30°。三个霍尔元件的安装方法为先确定一个传感器位置,再间隔30°相继安装另外两个,安装位置如图4所示。观测传感器输出信号,然后按照相反方向慢慢转动三个位置固定的传感器,直到当前信号组出现跳变时为止,此时位置即是电机的最佳换相点[8]。

图4 电机轴芯示意图
2.2 修正鸭舵位置检测
舵机位置检测采用六短时脉冲定位技术给电机一定的占空比值和执行时间,按照电机电周期6次通电顺序后,电机转子就可以在相应区间位置停留。单纯的六短时脉冲定位误差在±30°范围,精度低,不能满足弹丸基本的修正精度。采用文献[5]的方法,通过给定绕组施加不同的电压失量,检测功率驱动器母线电流,可得到零速和低速时转子磁极的位置,使定位分辨精度在±7.5°范围内[5,9]。
霍尔传感器的输出信号能检测出当前转子所在扇区位置,实现永磁同步电机的换相,判断霍尔元件信号状态来确定电机的正反转、旋转角度等位置信息。霍尔位置传感器输出信号为HA、HB、HC,通过HA和HB的相位差判断电机的正反转,波形如图5、图6所示。
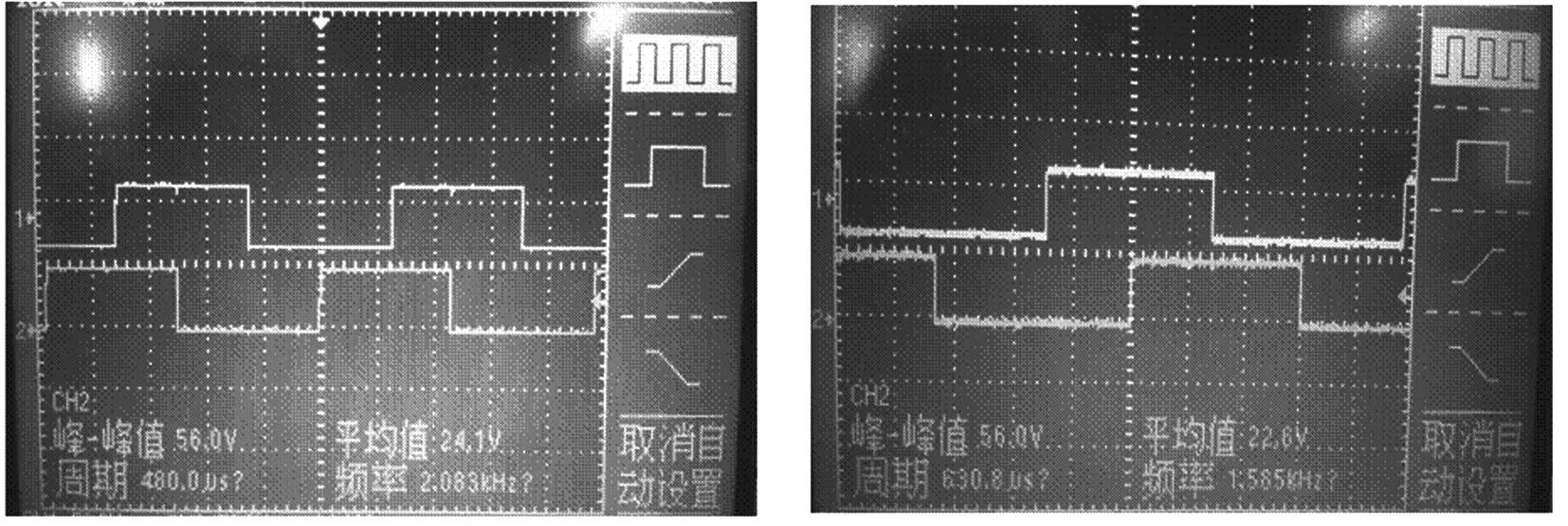
图5HA超前HB电机正转 图6HB超前HA电机正转
表1给出三相全波六状态工作方式换相真值表和霍尔信号与对应转子位置扇区的关系。
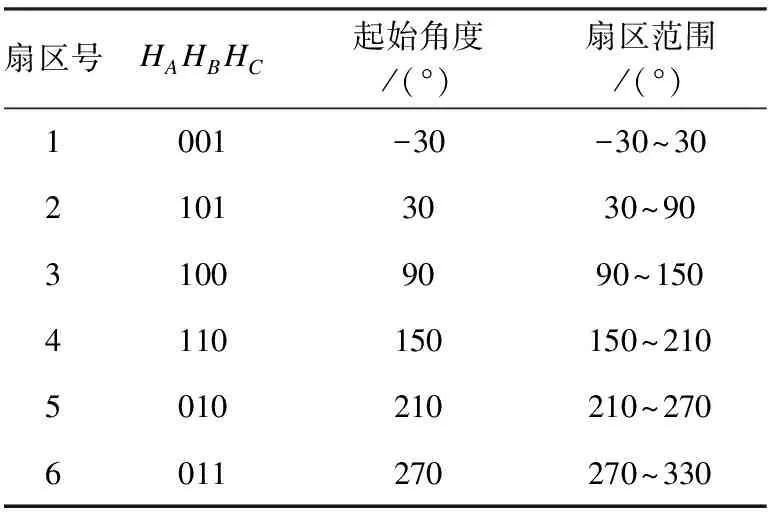
表1 霍尔信号与对应转子位置扇区的关系
霍尔位置传感器输出信号HA、HB、HC,在每个360°电角度内给出6个代码,这6个代码顺序是001、101、100、110、010、011。换相控制逻辑电路接收转子位置传感器的输出信号HA、HB、HC,并对其进行译码处理,给出电子换相器主回路中6个开关管的驱动控制信号,实现电机三相顺序通电完成永磁无刷电机的换相[9-10]。
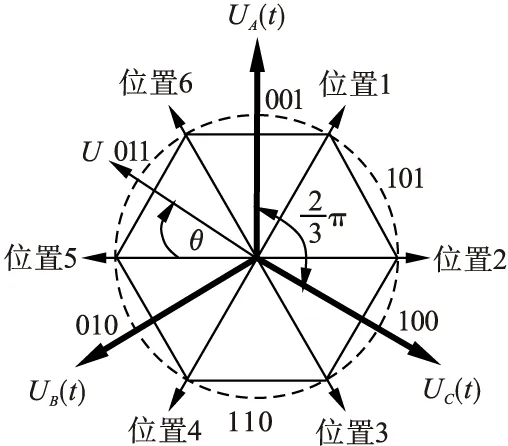
图7 电机换相矢量图
图7是一个电周期转子通电的矢量图,按照表1的通电时序顺序地给电机周期性加电,电机既可转动[11]。
3 实验研究
3.1 转速测量结果分析
弹体处于高速旋转状态下,鸭舵舵片同弹体相对旋转之间存在一定的转速差。实现舵片的减旋,转速测量的准确与否是关键,实验设计条件为舵片同弹体在不同转速差下,依霍尔传感器实际测量值的误差大小来判断系统测速的准确性。实验数据如表2所示。
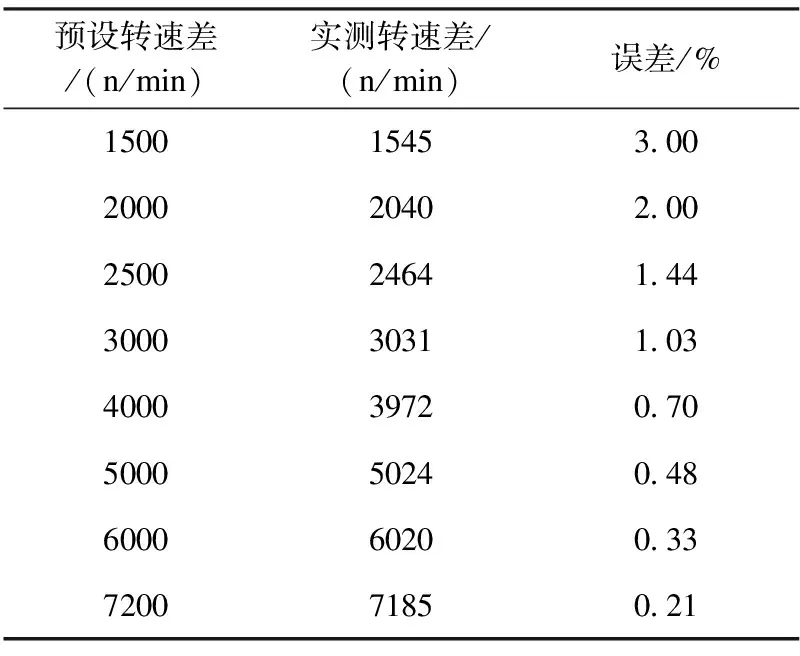
表2 不同转速差下实测误差
实验数据的分析采用同条件下多组数据求平均的方法,避免偶然误差,提高了实验准确性。由表2数据利用Matlab进行数据统计拟合得到的曲线如图8所示。
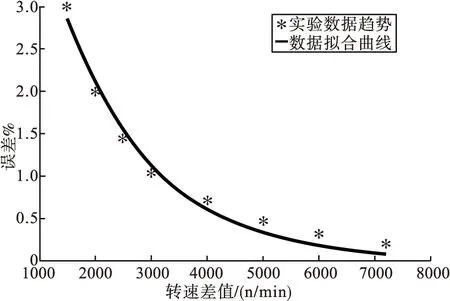
图8 转速测量误差曲线
误差分析表明,转速测量误差在3%以内,并且随着预设转速差值的增大测量误差愈小,呈指数形式下降,函数关系如式(2)所示。
y=7.1803×exp(-0.006x)
(2)
由实验可知,高速旋转状态下系统较低转速时具有更精确测量效果,系统受外部扰动作用时控制系统能更快响应达到稳定状态,由此进一步提高系统的稳定性、可靠性。
3.2 模拟样机角度修正
实验在模拟转台上进行,预先设置舵片停止角度为90°,在不同弹体转速下测量最终舵片的停止角度。因修正舵机为一惯性系统,在不考虑系统惯性之前,实验测得停止角度同预设角度偏差较大,很难起到准确修正的目的。根据旋转系统的动能定理:
(3)
据电磁转矩和PWM波占空比的关系,结合实验测量的系统固有参数和系统实时测量参数可得:
(4)
整理式(4)可得目标角度θ的表达式:
(5)
式中:θ为目标角度;J为舵机系统转动惯量;ω1、ω2为舵片停止前后的角速度;M1为电磁转矩;M2为轴承摩擦力矩和惯性力矩之和;M3为风阻力矩。其中J、M2为对样机进行多次试验测量计算出的合理数据。舵机系统的控制方法在考虑轴承摩擦力矩和惯性力矩对系统的影响情况下,实验数据如表3所示。
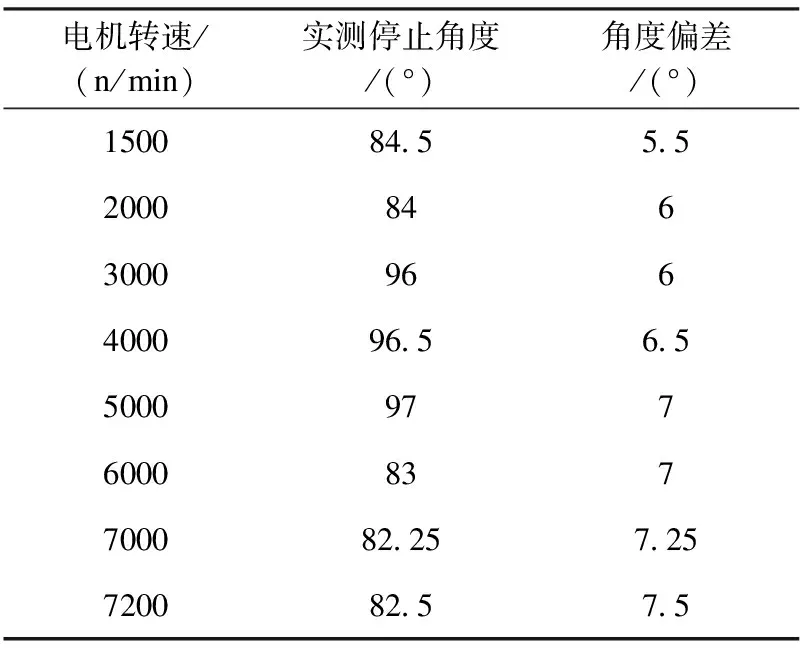
表3 舵片修正角度偏差
由表3可知,角度偏差在7.5°范围内,很大程度地提高了舵机修正精度。角度偏差数据分析表明,电机的转速越大,舵片停止角度偏差呈增大趋势,当电机转速达到7200n/min时角度偏差为7.5°。舵机修正原理是通过有限次不连续的动作来完成对舵片的控制,从而达到二维修正的目标。该系统在一定精度上实现了高速旋转弹的二维修正,为后续高精度的舵机修正系统的研究提供了实验依据。
4 结论
实现高速旋转弹电动舵机修正系统舵片减旋和停止角度的有效控制,通过理论分析和平台实验的验证,该舵机修正系统在十字型固定鸭舵的有限次不连续的修正下,能达到高旋弹修正精度的基本要求。采用霍尔传感器,在弹体高速旋转下能够检测得到高精度的舵机位置信息,并且减小舵机系统的体积。该舵机系统实现了高旋弹二维修正前期的减旋和修正段的舵机停止角度修正,基本达到二维弹道修正系统对气动舵机的控制要求,为后续的弹道修正研究提供了参考依据。
[1]周中华.二维弹道修正装置设计[D].南京:南京理工大学,2006.
[2]李新福,陈柏宁,郝永平,等. 弹道修正执行机构中电机的控制方法研究[J].成组技术与生产现代化,2014,31(3):36-40.
[3]张相军,陈伯时.无刷直流电机控制系统中PWM调制方式对换相转矩脉动的影响[J].电机与控制学报,2003,7(2):87-91.
[4]王秀和,李光友,杨玉波.永磁电机[M].北京:中国电力出版社,2010.
[5]汤宁平,崔彬.高分辨的永磁无刷直流电机转子零初始位置检测方法[J].电工技术学报,2013,28(10):45-49.
[6]郝永平,孟庆宇,张嘉易.固定翼二维弹道修正气动特性分析[J].弹箭与制导学报,2012,32(3):171-173.
[7]李宁,汪木兰,左健民.无刷直流电机霍尔信号细分反馈方法的研究[J].电力电子技术,2006,40(5):86-91.
[8]邓星钟.机电传动控制[M].武汉:华中科技大学出版社,2006.
[9]刘吉超,李巴津,伍春生.无刷直流电机霍尔传感器定位方法[J].微电机,2014,47(7):59-62.
[10]杨培双.无刷直流电机中霍尔位置传感器的设计与应用[J].机电设备,2010,24(3):41-45.
[11]William J.Larkin,Mitch homas.Atmospheric Flignt of a Variable-Bend Body[J].Jounal of Guidance and control,1979,2(5):382-387.
(责任编辑:赵丽琴)
Study on Position Sensor Applied in the High Rotary Steering Gear Control System
WANG Ling,ZHANG Jinchao,QIAO Lei,HAO Yongping,ZHANG Fuxin
(Shenyang Ligong University,Shenyang 110159,China)
To realize the high-speed spinning projectile trajectory correction,the correction of steering gear reduction spinning and servo system of permanent magnet motor positioning control testing are critical.Based on the two-dimensional fixed duck rudder work principle and control methods research of the permanent magnet synchronous motor,the way of steering gear system location correction control is detected by hall sensor.Through the installation of hall sensor in the simulation prototype,the position detection precision of the steering gear and speed measuring precision is improved by the improved six short pulse positioning technology.Experimental results show that the steering gear control system structure is simple with the ideal positioning accuracy.And under the condition of high speed rotating system,it has good stability and high reliability,which provides experimental basis for subsequent spiral spring two-dimensional trajectory correction on steering gear control system research.
ballistic correction;permanent magnet synchronous motor;six short pulse position;hall sensor;the position detection
2015-04-07
国家863计划资助项目(2009AA04Z167)
王玲(1960—),男,教授,研究方向:嵌入式计算机应用及非线性控制系统.
1003-1251(2015)04-0019-05
TJ765.2
A