低速桨叶翼型设计与气动特性分析
2015-02-20邵伟平何敏桃石玉杰
秦 洁,邵伟平,何敏桃,石玉杰
(沈阳理工大学 1.装备工程学院;2.机械工程学院,辽宁 沈阳 110159)
低速桨叶翼型设计与气动特性分析
秦 洁1,邵伟平2,何敏桃2,石玉杰1
(沈阳理工大学 1.装备工程学院;2.机械工程学院,辽宁 沈阳 110159)
针对飞行器桨叶翼型设计,运用计算机辅助设计方法进行分析。在翼型气动特性及桨叶扭转设计上充分考虑桨叶气动性能的影响因素,借助气动力分析方法进行桨叶翼型气动力特性影响分析,结果表明:提高了翼型设计的准确性、缩短设计周期。
桨叶扭转设计;翼型;气动特牲分析
随着计算机辅助设计技术广泛应用于各个领域,利用信息化技术进行旋翼螺旋桨的桨叶设计制造成为趋势[1-2]。早期,受限于信息化技术以及加工工艺、材料等客观技术条件,旋翼桨叶主要采用矩形桨叶或简单线性扭转桨叶[3-4]。随着相关技术的推出,尤其是计算机辅助技术的发展,许多飞行器的桨叶均采用扭转桨叶代替普通矩形翼[5-6],从而改善旋翼的气动特性。
根据扭转桨叶设计的现状,经过大量分析与试验可知:在低速桨叶扭转的设计中有许多共性的问题,如低速翼型的一般气动特性[7-8]、垂直飞行桨叶的安装角的设定等[9]。本文通过计算机辅助设计与分析方法,针对翼型的气动特性进行分析,建立有效的分析模型;通过不同参数的设定与分析,确定相应的翼型参数,且得到相关参数对桨叶扭转设计的影响规律。
1 低速桨叶翼型设计模型
采用动态嵌套网格方法[11-12]进行非定常数值模拟,旋翼桨叶的运动子域网格相对于机身的静止网格做动态旋转,各自存在一定的重叠区域,以保证动态嵌套过程中的数据传递。
旋翼扭转桨叶剖面为T16翼型,无桨根切除和桨尖削、下反及后掠。整个计算空间生成四面体非结构嵌套网格,分为两个子域网格。图1a为静止子域网格切片图(单独考虑桨叶的气动特性,略去机身对桨叶的影响,故没有机身),图1b为整体嵌套网格的切片重叠显示图。该嵌套网格方法可确保在不同时间站位上两个子域网格之间均会有适当的重叠区域,且无需重新生成洞边界,无需建立Inverse Map网格[13],提高了子域网格生成和动态嵌套的效率。
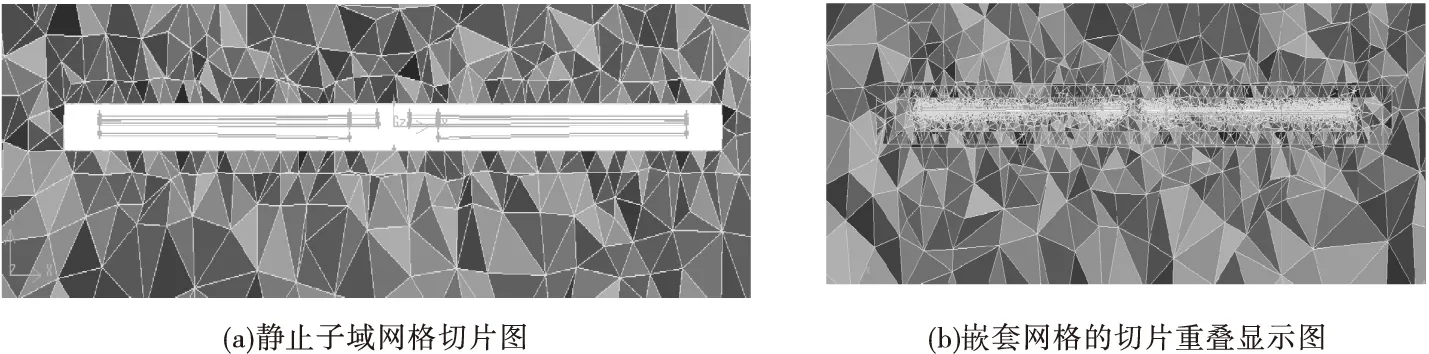
图1 桨叶嵌套网格图
2 低速桨叶翼型气动特性分析
2.1 边界条件
分析主旋翼T16翼型,设定工作环境为1km高空,旋翼翼展D=660mm,转速n分别取1000rpm、2000rpm、3000rpm,翼型的弦长c=60mm。
选择扭转桨叶0.7R处的几何安装角φ0.7R为桨叶安装角[14],此时当转速n=2000rpm时,0.7R处来流速度为
建立T16翼型的模型,进行网格划分,如图2所示。设定边界条件,将不同来流的速度大小分别设置为25m/s、50m/s、75m/s,来流方向从-8°~14°。

图2 翼型及网格划分
2.2 气动特性分析
腹胀兼口苦服保和丸 平时胃肠功能不好,经常口苦腹胀,出现消化不良、恶心呕吐时可选择保和丸。它可健脾理气、燥湿化痰。
根据不同来流进行相应的仿真,T16翼型的主要气动特性曲线如图3所示。

最有利状态点与最经济状态点处于零升阻力系数到最大升力系数之间。最有利状态点k1=(Cl/Cd)max,即求y=k1x与极曲线方程的交点,使k1取最大值,此时,k1为最大升阻比;最经济状态点k2= (Cl3/2/Cd)max,即求y3/2=k2x与极曲线方程的交点,使k2取最大值。最有利状态点和最经济状态点的的计算流程如图4所示。
设置运行步数为10000,根据极曲线方程及特性曲线与阻力特性曲线[15],求得:最有利状态点α1= 2.7°,此时Cl= 1.2939,Cd= 0.05283;最经济状态点α2= 3.1°,此时Cl= 1.3283,Cd= 0.05483。所以最佳迎角αk∈( 2.7°,3.1° )。综合考虑航程与续航时间,取最佳迎角αk= (α1+α2) / 2。
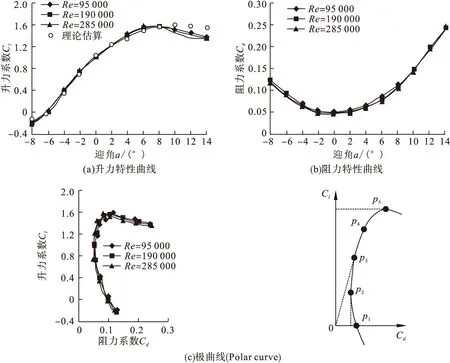
图3 翼型气动特性
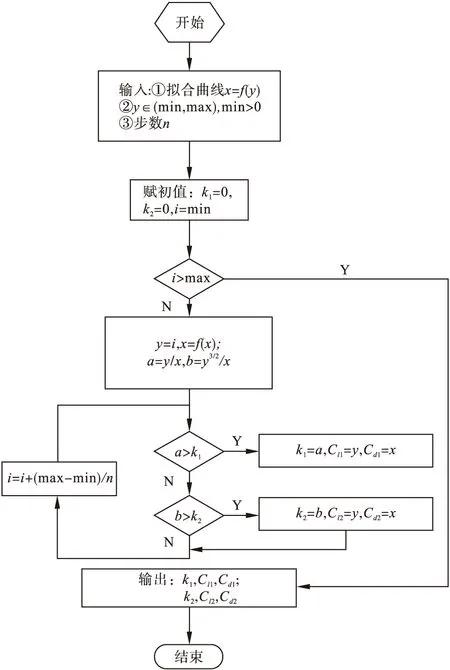
图4 最有利状态点与最经济状态点的求解程序流程图
3 桨叶扭转设计
3.1 桨叶扭转的几何模型
当以速度V垂直上升(或下降),桨叶以角速度ω旋转时,桨叶不同半径r处的圆周速度为ωr。桨心处(r= 0)无圆周速度,桨尖处的圆周速度为ωR(R为旋翼半径,R=D/2)。示意图如图5所示,在某剖面段处桨叶剖面的相对合成气流Γ为V、v1与ωr的矢量和[14],由此可见,不同r处,合成速度Γ大小与方向均是变化的,其中轴向来流速度除了上升速度V外,还有诱导速度v1。

图5 垂直上升时桨叶剖面空气动力一般特性图
图5中,桨叶几何安装角φ定义为旋转平面与翼弦(翼型的弦长线)之间的夹角;桨叶迎角α定义为相对来流速度Γ与翼弦之间的夹角,即使在悬停状态;由于诱导速度的存在,α不等于φ;来流角ε定义为相对来流速度Γ与旋转平面间夹角。则有
(2)
根据垂直飞行的动量理论[10]与叶素理论,诱导速度可以表示为
(3)
式中:b为桨叶叶片数;V为匀速上升或下降速度,当匀速下降时,V的值为正;c为弦长。
3.2 桨叶扭转参数计算
桨叶扭转设计既设计桨叶不同站位r处几何安装角,其目的是使不同站位r处截面翼型实际工作时均处于最佳迎角。
为精确快速求解不同翼型、不同站位r所对应的φ的设定,根据式(2)、式(3),其计算流程如图6所示,其中初始几何安装角赋值φ>α0。
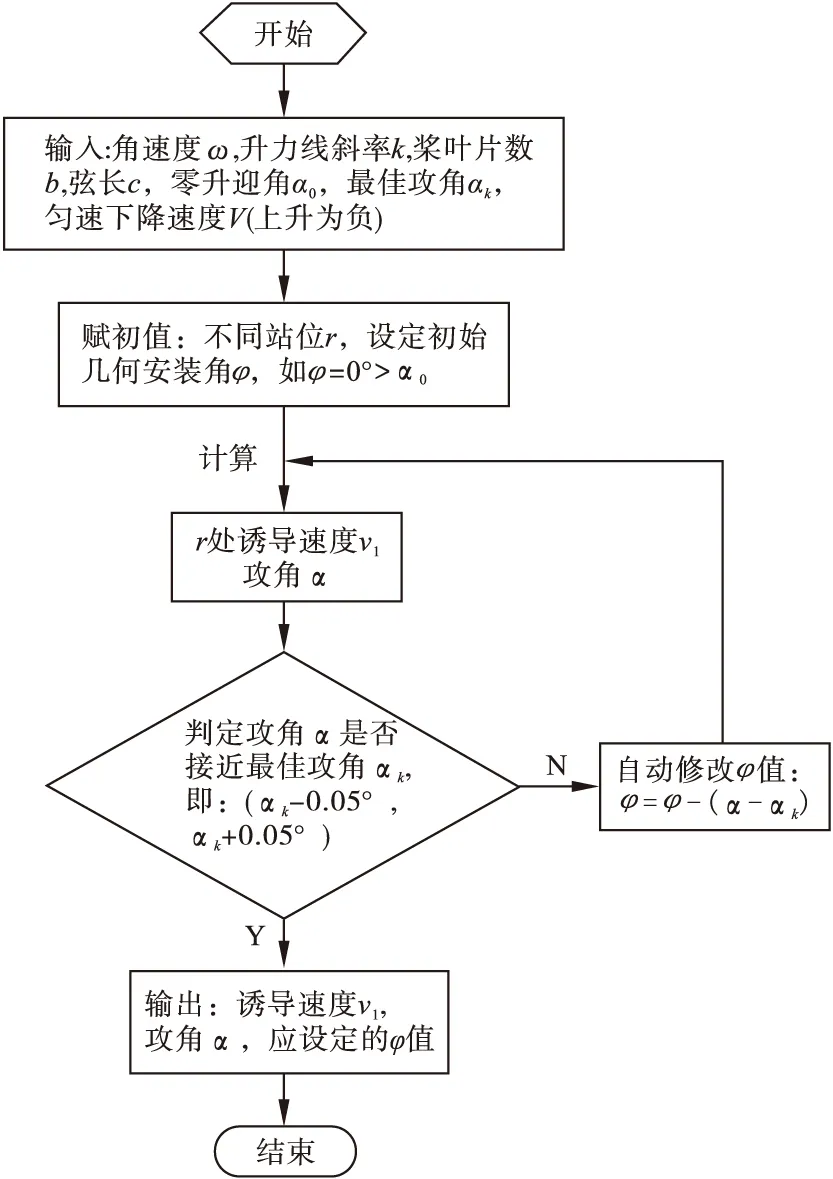
图6 桨叶扭转设计程序流程图
在计算上可以是不同的翼型与翼展,同时也可反映桨盘实度(即:b、c等参数)对诱导速度、几何安装角度的影响。
通过分析T16翼型气动特性,获得k=6.43rad-1,α0=-6°,αk=2.9°,c=60mm,同时,设定b=2,假定ω=209.44rad/s(即2000r/min),初始φ=0°>α0。
当V=0m/s,即处于悬停状态时,得表1所示的旋翼桨叶在不同站位处几何安装角φ的设定值。
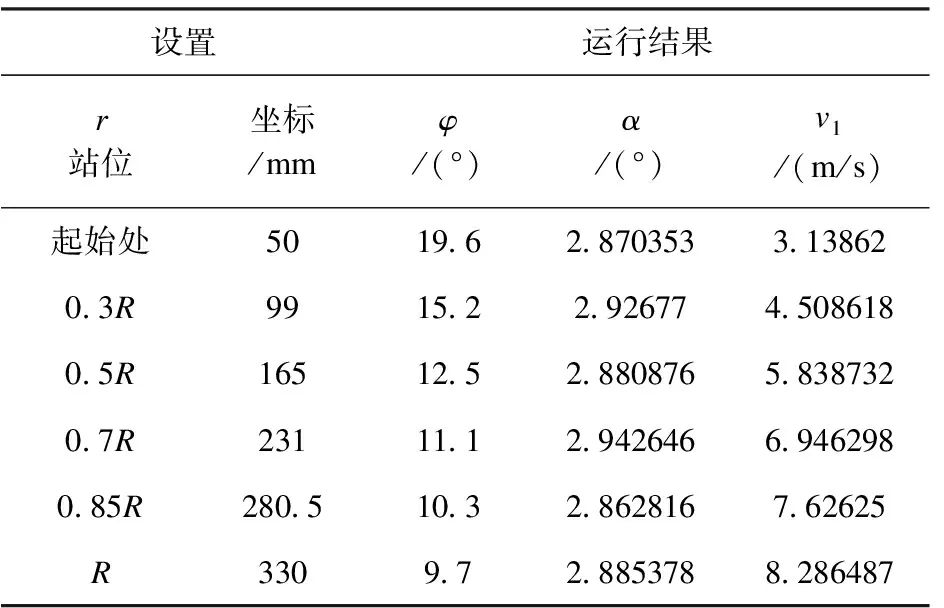
表1 悬停状态r-φ的设定值
当V=2m/s,即飞行器垂直向下以2m/s的速度匀速飞行,得表2所示的旋翼桨叶在不同站位处几何安装角φ的设定值。

表2 2m/s匀速下降时r-φ的设定值
改变转速,悬停状态的桨叶扭转设计与表1的结果相同,说明悬停状态桨叶扭转设计与转速无关;2m/s匀速下降的桨叶扭转设计与表2的结果不同,说明与转速有关。
4 桨叶模型仿真分析
结合不同桨叶的工作状况,分别考虑悬停状态(表1)及以2m/s匀速下降(表2)的桨叶。其中,桨叶的转速为2000rpm,表1与表2的桨叶均设定悬停与2m/s匀速下降两种运动状态,得表3。
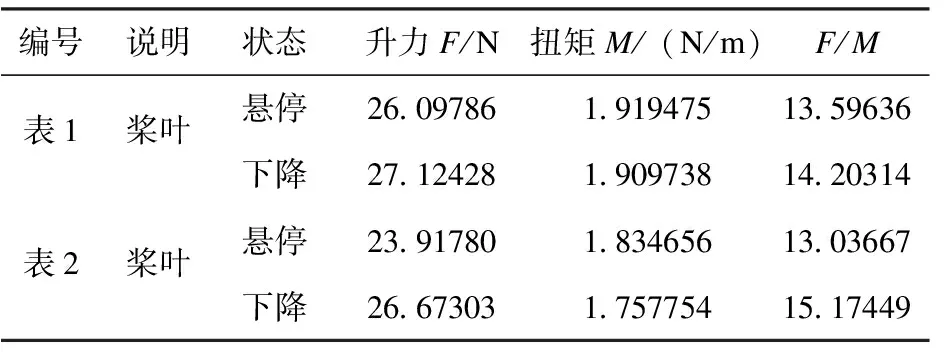
表3 两种桨叶不同状态的气动特性
由此可以看出:(1)不同桨叶在不同运动状态下的气动特性存在差异;(2)在悬停状态,经计算机辅助桨叶扭转设计的表1的桨叶,相比较于2m/s匀速下降的表2的桨叶更适用于悬停状态;同时,表2的桨叶更适用于2m/s匀速下降。因此,在不同运动状态下设计的桨叶分别适用于自身的运动状态。
5 结论
对桨叶转速为2000rpm时的悬停状态和2m/s匀速下降状态进行了仿真验证,结果表明适用于各自的工作状态。计算机辅助桨叶扭转设计系统可方便地进行不同翼型和翼展的设计,也可进行桨叶转速、上升(下降)速度、桨盘等相关参数的计算,以及对诱导速度、几何安装角度的确定。在悬停状态下,桨叶扭转设计与转速无关。
在确定的桨叶工作状况下,采用计算机辅助翼型的气动特性分析,可准确、有效地获得翼型的一般气动特性,简化翼型的分析与计算,降低计算成本。
[1]张华,夏显明,孟令启,等.计算机辅助技术在现在制造技术中的地位和应用研究[J].装备制造技术,2013,(12):222-224.
[2]黄侠.应用计算机辅助技术制造波音737-700垂尾[J].航空工程与维修,1999,(4):1-5.
[3]Walsh J L,Bingham G J,Riley M F.Optimization methods applied to the aerodynamic design of helicopter rotor blades [J].Journal of the American Helicopter Society,1987,32(4):39-44.
[4]Wilby P G.The development of rotor airfoil testing in the UK [J].Journal of the American Helicopter Society,2001,46(3):210-220.
[5]乔宇航,马东立,邓小刚.基于升力线理论的机翼几何扭转设计方法[J].北京航空航天大学学报,2013,39(3):320-324.
[6]王博,招启军,徐国华.悬停状态直升机桨叶扭转分布的优化数值计算[J].航空学报,2012,33(7):1163-1172.
[7]Lissaman P B S.Low-Reynolds-Number airfoils [J].Annual Review of Fluid Mechanics,1983,(15):223-239.
[8]Selig M S.The design of airfoils at low Reynolds numbers[C].AIAA, 1985:74-85.
[9]Arnaud Koehl,Hugues Rafaralahy,Mohamed Boutayeb,et al.Aerodynamic Modelling and Experimental Identification of a Coaxial-Rotor UAV[J].J Intell Robot Syst,2012,(68):53-68.
[10]唐正飞,王畅,高卓飞.微型旋翼悬停状态气动性能分析方法[J].航空动力学报,2011,43(3):357-362.
[11]许和勇,叶正寅,史爱明.基于非结构嵌套网格的旋翼机身干扰流场数值模拟[J].航空动力学报,2010,28(6):814-817.
[12]叶靓,招启军,徐国华.非结构嵌套网格的直升机旋翼/机身前飞流场数值模拟[J].航空动力学报,2009,24(4):903-910.
[13]Meakin R L.A new method for establishing intergrid communication among systems of overset grids[C].AIAA,1991:86-91.
[14]杨一栋.直升机飞行控制[M].北京:国防工业出版社,2011.
[15]K.W.普劳蒂.直升机性能及稳定性和操纵性[M].高正等译.北京:航空工业出版社,1990.
(责任编辑:赵丽琴)
Low-speed Blade Twist Designs and Its Aerodynamic Characteristics Analysis
QIN Jie,SHAO Weiping ,HE Mintao,SHI Yujie
(Shenyang Ligong University,Shenyang 110159,China)
The method of CAD is used for the aircraft Blade design.The influence factors of aerodynamic performance are taken into account on the airfoil profile aerodynamics and blade twist design.The aerodynamic characteristic of blade airfoil is analyzed using the method of aerodynamic analysis.The result shows that the design cycle is reduced and the design accuracy is improved.
blade twist design;airfoil profile;aerodynamic characteristic
2014-08-01
秦洁(1963—) 女,教授,研究方向:弹药设计与模拟仿真技术.
1003-1251(2015)04-0024-05
V224
A
