纯电动城市客车动力参数匹配与优化分析
2015-02-16田韶鹏
汪 洋,田韶鹏
(1.武汉理工大学 现代汽车零部件技术湖北省重点实验室, 湖北 武汉 430070;2.武汉理工大学 汽车零部件技术湖北省协同创新中心,湖北 武汉 430070)
纯电动城市客车动力参数匹配与优化分析
汪 洋1,2,田韶鹏1,2
(1.武汉理工大学 现代汽车零部件技术湖北省重点实验室, 湖北 武汉 430070;2.武汉理工大学 汽车零部件技术湖北省协同创新中心,湖北 武汉 430070)
根据纯电动城市客车对动力性和经济性的要求,对其整车参数和设计要求进行了动力系统匹配,以Cruise为平台,分别建立了各个部件的仿真模型并构成整个动力系统。结合仿真结果,对其性能表现进行了分析。为了更好地提升整车性能表现,利用Isight对传动系传动比进行优化,使其整车性能尤其是经济性达到最优。
纯电动城市客车;动力系统;参数匹配;仿真分析;经济性优化
随着对环境保护问题关注的日益增长,纯电动城市客车的发展越来越受到人们的重视。客车大部分时间运行在道路拥挤的城市内,在保证动力性的前提下,经济性显得尤为重要。根据整车参数及动力性要求对客车的动力系统进行匹配,包括电机、变速器,以及电池等。利用Cruise对整车建模仿真得出仿真结果。为了达到最优的性能表现,将Isight与Cruise进行联合优化,得到经济性优先的最优传动系传动比。
1 纯电动城市客车整车参数及设计要求
纯电动城市客车整车参数、变速器参数及设计要求如表1~表3所示。
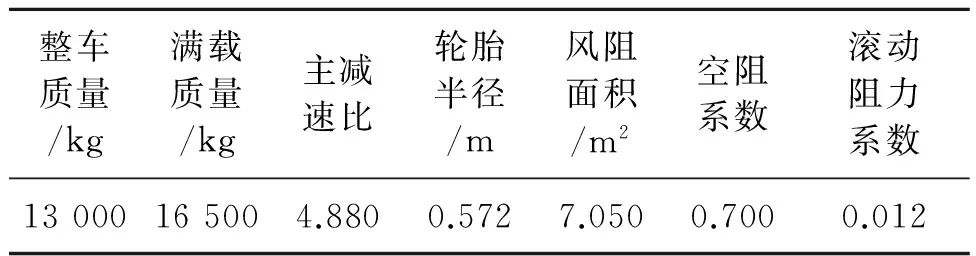
表1 整车参数

表2 变速器参数

表3 设计要求
2 动力系统参数匹配
2.1 驱动电机参数选择与匹配
2.1.1 峰值功率的确定
(1)根据最高车速确定。电机峰值功率应当满足最高车速要求,即峰值功率应大于等于客车在无坡度路面上以最高车速匀速行驶时所受到的阻力功率[1-2],因此根据最高车速确定电机峰值功率P1,如式(1)所示:
(1)
式中:ητ为机械效率;m为整车总质量;g为重力加速度;f为滚动阻力系数;umax为最高车速;CD为空气阻力系数;A为风阻面积。
(2)根据最大爬坡度确定。最大爬坡度对于电机的峰值功率是必不可少需要考虑的因素[3]。根据最大爬坡度功率需求可以推出电机峰值功率P2,如式(2)所示:

(2)
式中:ua为爬坡车速;α为最大爬坡度。
(3)根据0~50 km/h的加速性能确定。城市客车在行驶过程中需要不断地起步、制动,该行驶特点对加速性能(尤其是0~50 km/h常用速度段)有一定的要求[4]。在良好路面上,车辆从静止起步的加速过程如式(3)所示:
v=vm(t/tm)x
(3)
式中:x为拟合系数,一般取0.5;vm为加速完成时车辆的末速度;tm为车辆从静止起步到末速度所用时间。
车辆的加速需求功率P3如式(4)所示:
(4)
式中:δ为车辆旋转质量换算系数;du/dt为行驶加速度。
再将式(3)代入式(4)可以得到峰值功率,如式(5)所示:
(5)
故峰值功率Pmax应满足Pmax≥max[P1,P2,P3]。
2.1.2 额定功率的确定
电机额定功率可由式(6)求出:
Pe=Pmax/λ
(6)
式中:Pe为额定功率;λ为电机过载系数,一般取2~3,笔者取2。
2.1.3 电机转速的确定
相对于低速电机,中速电机和高速电机的造价较高,且它们对与其配套的轴承等有着很高的要求,过高的转速还会增加机械损失[5]。因此笔者选用低速电机,取最高转速nmax为4 000 r/min。根据式(7)所示车速与电机转速间的关系,经验证得知最高转速选取满足最高车速要求。
电机的额定转速如式(8)所示:
nmax≥vmaxi0igmin/(2πr)
(7)
ne=nmax/β
(8)
式中:ne为额定转速;nmax为电机最高转速;β为电机扩大恒功率区系数,其值一般在2~4之间,笔者取2.5。
2.1.4 电机转矩的确定
电机的额定转矩Te可由电机的额定功率和额定转速确定,如式(9)所示:
Te=9 550Pe/ne
(9)
电机的峰值转矩Tmax如式(10)所示:
Tmax=λTe
(10)
2.2 电池组参数匹配
电池组是纯电动客车的动力来源,是其重要组成部件[6]。笔者选用能量密度较高的锂电池构成能量型电池组,电池组电压选为538V。
为了提高电池寿命,充满电后电池SOC上限按照90 %计算,最大放电SOC下限按10 %计算,续航里程按250 km计算。续航过程设为无风状态,在水平道路上以40 km/h匀速行驶且无加速阻力,车辆所需的驱动力如式(11)所示:
(11)
式中:G为满载质量;va为匀速行驶车速。则车辆行驶250 km所需的功W为:
W=Fs
(12)
其中,s为匀速行驶距离。
需要的电池数目为:
(13)
式中:Us为电池单体额定电压;Cs为电池单体容量;DOD为放电深度,取80 %。因此串联的电池数目N1为:
N1=U/Us
(14)
并联的电池数目N2为:
N2≥N/N1
(15)
2.3 匹配结果
驱动电机参数和电池组参数分别如表4和表5所示。
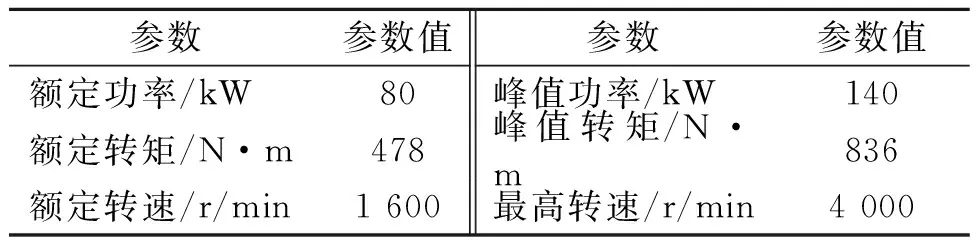
表4 驱动电机参数

表5 电池组参数
3 基于Cruise的整车建模仿真
3.1 整车模型的建立
利用上述增程式客车的具体参数在Cruise中建立模型,如图1所示。该模型主要包括电池模块、驱动电机模块、变速器模块、主减速器模块、轮胎模块、制动模块和车用电器模块等。

图1 纯电动客车Cruise整车模型
3.2 循环工况下的仿真
由于该车型为城市客车,主要运行在道路状况拥挤的城市工况,因此选用了中国城市道路典型工况(CUDC)进行仿真。该工况总行驶里程为5.89 km,历时1 314 s,最高车速为60 km/h,平均车速为16 km/h,其工况曲线如图2所示。

图2 中国城市道路典型工况
由图3可以看出,SOC初始值为90 %,随着循环的进行,SOC整体呈下降趋势,循环结束时电池SOC为88.03 %。经过转换计算得到该工况下的耗电量为70.18 kW·h/100 km,与其他车型相比有较大的优势。

图3 循环工况SOC曲线

图4 全负荷加速及最高车速曲线
3.3 全负荷加速及最高车速仿真结果
全负荷加速曲线体现了车辆的加速性能,图4为全负荷加速及最高车速曲线。由图4可知,该车型0~50 km/h加速用时19.2 s,满足该车型给出的加速时间指标要求(≤20 s)。由于电机在低转速时输出转矩较大,能够获得的加速度较大,0~20 km/h加速时间较短,这正好符合城市客车的运行特点。由于我国规定最高车速在满载的情况下测定,因此最高车速曲线与全负荷加速曲线重合,并且最高车速在104 km/h左右,满足最高车速要求。
3.4 最大爬坡度的仿真结果
爬坡性能是车辆动力性好坏的一个重要指标,图5所示为各挡最大爬坡度。由图5可以得到,满载情况下该车1挡最大爬坡度在22 %左右,即使在1挡10 km/h的情况下爬坡度也能维持在20.7 %左右,满足动力性指标1挡爬坡度≥18 %,可见其爬坡性能良好。
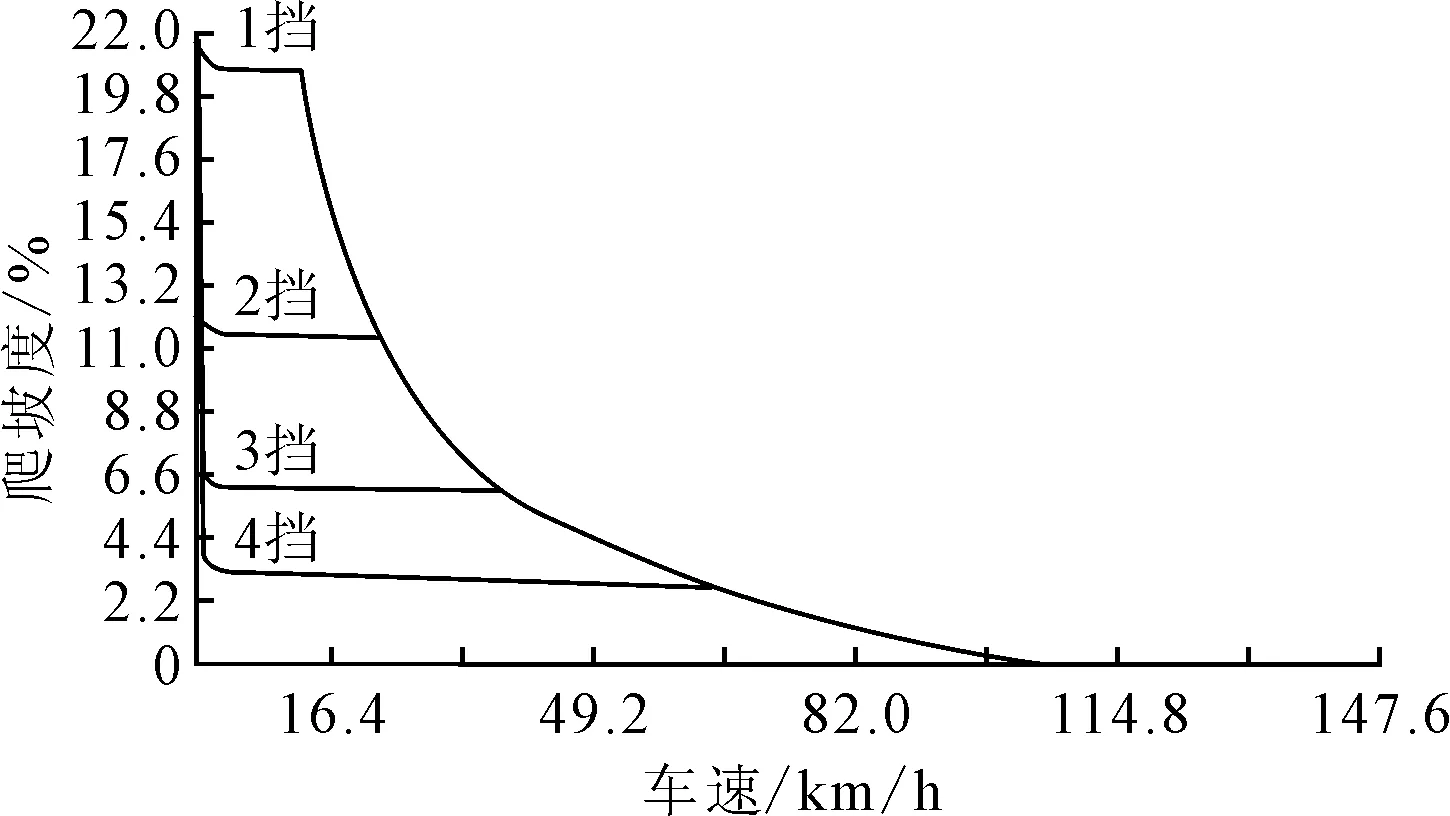
图5 各挡最大爬坡度曲线
3.5 续航里程的仿真结果
由于Cruise中没有专门针对纯电动客车续航里程的计算任务,因此建立一个40 km/h匀速行驶工况,用该工况对续航里程进行仿真,如图6所示。可以看出,初始SOC值为90 %,在续航里程达到250 km时,SOC值约为10 %,在满足续航里程要求的条件下,又满足了电池的放电深度要求。
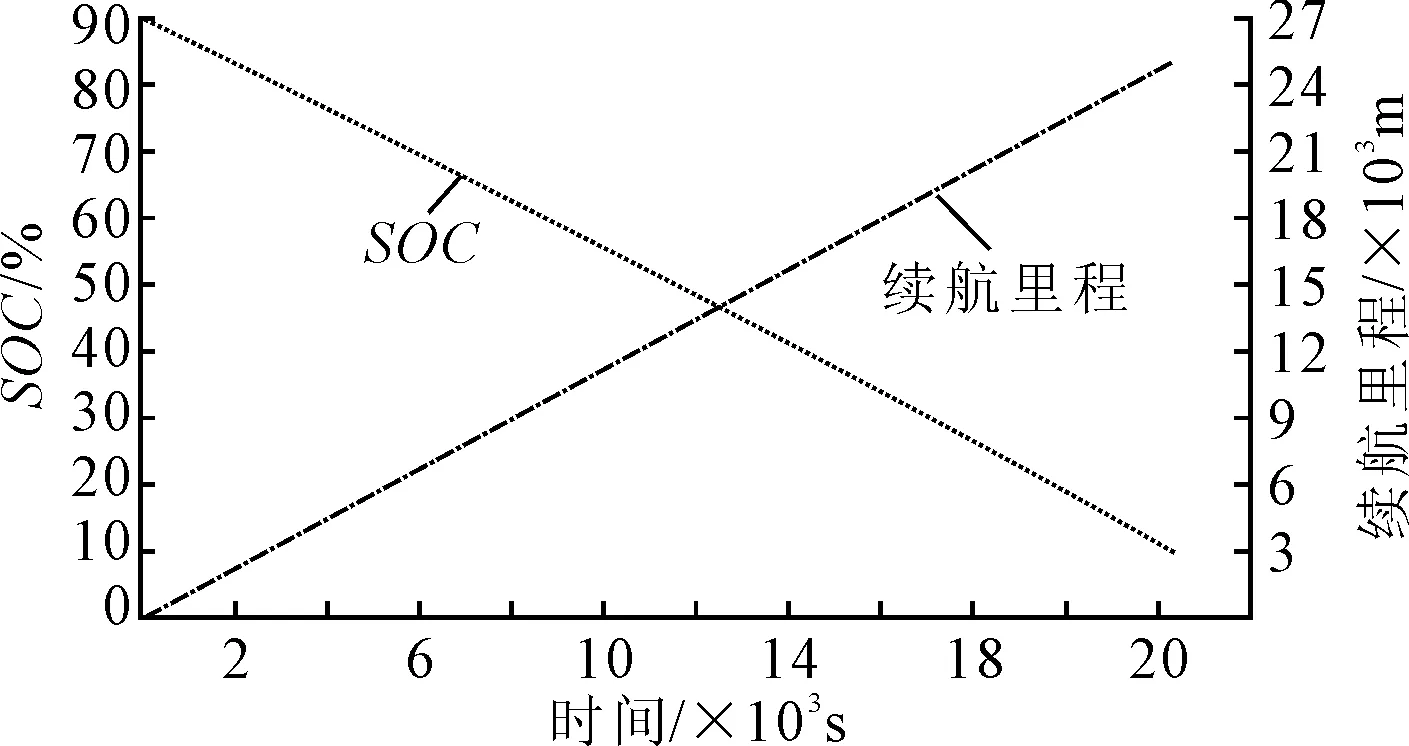
图6 40 km/h匀速行驶下续航里程曲线
4 传动比优化
Isight可与Cruise进行集成运算优化[7]。一般优化流程为:①进行Isight与Cruise之间的bat调用文件设置,使Isight能够调用Cruise建立的整车模型。②进行优化方案的设定,包含初值、约束、方法、目标等。③进行优化运算,输出结果。
当变速器处在直接挡挡位时,发动机转矩经变速器第一轴和第二轴直接输出,不经过其他齿轮,此时变速器的传动效率高。因此,没有对4挡传动比即直接挡进行优化,而是选择变速器的1、2、3挡传动比和主减速比作为优化变量,即:
X=[X1,X2,X3,X4]T=[ig1,ig2,ig3,i0]T
(16)
4.1 动力性目标函数
汽车动力性主要表现在3个指标上,即最大爬坡度Gmax、最高车速umax和加速时间t[8]。由于该车型为城市客车,大部分时间是行驶在坡度较小的平坦路面[9],只有部分路况,如高架桥、地下隧道等需要考验车辆的爬坡能力,因此最大爬坡度权重因子取为0.2。在城市道路行驶出于安全因素和交通状况的考虑,车速也不能过高,最高车速权重因子取为0.1。起步时间对于城市客车来说显得尤为重要,因为在市区行驶起步后需要尽快汇入车流,所以加速时间权重因子取为0.7。
动力性目标函数如式(17)所示:
(17)
式中:Gmax为优化后爬坡度的终值;Gmax0为仿真模型中爬坡度的初值;umax为优化后最高车速的终值;umax0为仿真模型中最高车速的初值;t为优化后0~50 km/h的加速时间;t0为仿真模型中0~50 km/h的加速时间。
4.2 经济性目标函数
CUDC循环比较接近实际行驶情况,由于是纯电动车型,因此可从电耗水平来评价其经济性。经济性目标函数如式(18)所示:
(18)
式中:Cpower为优化后的百公里耗电量;Cpower0为仿真模型中百公里耗电量。
对于城市客车来说,由于运行时间较长,在动力性条件满足的情况下,经济性显得尤为重要,因此综合目标函数中,动力性目标函数权重因子分配为0.3,经济性目标函数权重因子分配为0.7。
4.3 约束条件
约束条件主要有各挡传动比之间的要求,动力性要求和整车设计要求。
相邻挡位之间的传动比比值不宜过大,过大会造成换挡困难,一般认为比值应小于等于1.8。
(19)
(20)
由于高挡位利用率较高,随着挡位数的升高,相邻两挡传动比也逐渐减小。
(21)
(22)
1挡起步时,最大驱动力必须小于等于地面对轮胎的附着力。
(23)
1挡传动比还应满足最大爬坡度要求,即:
(24)
同时还应满足设计要求:
g7(X)=18-Gmax≤0
(25)
g8(X)=t0~50-20≤0
(26)
g9(X)=100-vmax≤0
(27)
综上所述,该多目标优化问题可表述为:
最大化D(X),E(X)
约束条件gj(X)≤0 (j=1,2,…,9)
4.4 Isight-Cruise联合优化
Isight优化模型如图7所示。Simcode中调用Cruise模型数据进行优化运算,优化结果如表6所示。
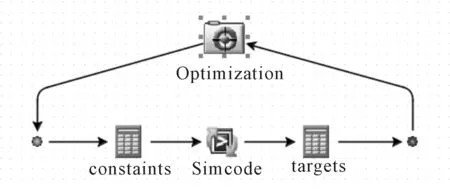
图7 Isight优化模型
由表6可以看出,动力性表现在优化后均下降,因此D(X)表现为负值。这是因为在不改变除传动比以外的其他部件参数的前提下,经济性得到优化提升则会导致整车动力性表现下降。优化后的传动比所带来的电耗比优化前减少了1.74%,这意味着长时间行驶在城市道路的客车更加节能。

表6 Isight优化结果
5 结论
介绍了一种纯电动城市客车的动力参数匹配方法,并利用Cruise建立了其仿真模型,对整车驱动系统性能进行仿真。仿真结果表明,该车的加速性能、爬坡性能、最高车速、续航里程满足该车的行驶要求,从而验证了动力系统参数设计的合理性。为了更好地提升该车型的经济性,利用Isight对传动系传动比进行优化,在满足动力性能的前提下,更好地满足了经济性要求。
[1] 袁苑.中型纯电动客车动力参数匹配仿真及再生制动研究[D].合肥:合肥工业大学,2012.
[2] 刘新.纯电动汽车动力参数匹配与仿真研究[D].重庆:重庆交通大学,2013.
[3] 王珏童.纯电动客车动力传动系参数匹配及整车性能研究[D].长春:吉林大学,2008.
[4] 李涛.增程式城市公交客车动力总成系统研究[D].昆明:昆明理工大学,2012.
[5] 胡明寅.增程式电动车动力系统设计及能效优化研究[D].北京:清华大学,2012.
[6] 张恒平.增程式城市公交车整车控制策略及总成参数匹配研究[D].武汉:武汉理工大学,2013.
[7] 陈佼.某城市公交动力传动系匹配优化研究[D].南京:南京理工大学,2014.
[8] 李涛,陈猛.增程式公交车动力系统设计及实例化研究[J].中国机械工程,2011(14):1759-1763.
[9] 徐达伟,回春.基于Cruise的纯电动客车仿真分析[J].武汉理工大学学报(信息与管理工程版),2015,37(2):183-186.
WANG Yang:Postgraduate; School of Automotive Engineering, WUT, Wuhan 430070, China.
[编辑:王志全]
Dynamic Parameters Matching and Optimization Analysis of a Pure Electric City Bus
WANGYang,TIANShaopeng
For pure electric city bus, economy appears to be particularly important when dynamic requirements are satisfied. Firstly, according to the bus data and design requirements of a pure electric bus, dynamic parameters were matched. Simulation models of each component that makes up the whole powertrain were established depending on the platform of cruise. Then, the simulation results of each performance were analyzed. For further improving the vehicle performance, powertrain ratios were optimized by Isight resulting in the optimal vehicle performance, especially economic performance.
pure electric city bus; powertrain; parameters matching; simulation analysis; economic optimization
2015-05-20.
汪洋(1990-),山东济宁人,武汉理工大学汽车工程学院硕士研究生.
国家高技术研究发展计划(“863”项目)基金资助项目(2011AA11A260).
2095-3852(2015)06-0688-05
A
U270.2
10.3963/j.issn.2095-3852.2015.06.006