餐厨泔水油水分离液位传感器设计
2015-01-13朱兴龙李鹭扬
周 丽,朱兴龙,李鹭扬,孙 钊,丁 俊
(扬州大学机械工程学院,江苏 扬州 225127)
餐厨泔水油水分离液位传感器设计
周 丽,朱兴龙,李鹭扬,孙 钊,丁 俊
(扬州大学机械工程学院,江苏 扬州 225127)
介绍了一种泔水回收预处理装置,该装置通过搅拌让有益降解菌与泔水中的固态脂肪(如肥肉等)充分接触并使之分解,然后通过过滤将泔水进行固液分离,再将分离后的油水混合物通过分离箱进行油水分离。根据油、水所处高度不同,设计了一种能识别油、水高度的液位传感器,详细阐述了传感器的工作原理、设计参数。最后对该传感器进行实验,实验结果表明所设计的传感器能够识别不同高度的油和水,为油、水的自动抽取提供了技术保证。
餐厨泔水;油水分离;液位传感器
液位传感器是获得液体高度信息的仪器,其种类繁多,在工业生产和日常生活中发挥着重要的作用。在化工行业,它可以用来计测输送聚合物时的粉体平面高度、反应缸的液位平面高度、石油化浆液位、化学储藏罐内的液位等;在冶金行业,可以用来计测制造铸件的管道熔铁平面高度和连续铸造生产过程中的钢包液位;在日常生活中则可用来检测汽油、柴油存储罐中的油位等等。因而它在工业生产和日常生活中起到耳目的作用[1]。
餐厨泔水分离出的泔水渣和泔水油,分别可以用来制作有机型缓释肥料和生物柴油或甘油等,餐厨泔水的回收处理可以使泔水变废为宝,具有较高的经济价值[2]。作者从餐厨泔水油水分离的角度出发,设计了一种可以对餐厨泔水进行固液分离、油水分离的泔水预处理机械装置——泔水降解机,并针对油水分离设计了一种液位传感器,经过实验,结果表明该传感器能够有效地识别油、水的高度,为自动抽取油、水提供了技术保证。
1 泔水降解机的工作过程
泔水降解机总体方案如图1所示,主要由降解箱、集液池、出料筒、油水分离箱组成。泔水降解机的工作过程是,首先泔水由粉碎机6粉碎,之后经过进料口4进入降解箱2,这时从菌种盒5中将降解菌放入到降解箱2内,然后蜗轮蜗杆减速器10开始工作,带动搅拌轴7旋转,搅拌轴7上安装的搅动叶片16随之动作,在设定时间内按正转—暂停—反转循环往复,让降解菌与泔水充分混合,使固态脂肪充分降解。泔水在充分混合后静置,蜗轮蜗杆减速器停止工作,待油水混合液经出液口17充分流出到集液池20之后,打开出料口,蜗轮蜗杆减速器再次工作,带动搅拌轴、推移叶片24推动泔水渣从出料口排出到出料筒。上述工作过程中,加热器水套19和保温层21一直工作,以维持泔水在适当的温度范围内,保证泔水中的油层呈现液态,以便于固液分离的顺利进行[3-4]。当集液池中油水达到一定高度时,通过油水泵18将其抽至油水分离箱11中进行油水分离,分离后的水沉积在油水分离箱的下部,而油则漂浮在水的上面,内置在油水分离箱中的液位传感器识别到水达到一定的高度并发出相应的信号,使油泵和水泵工作,分别将油、水抽取到相应的运输桶中运走。
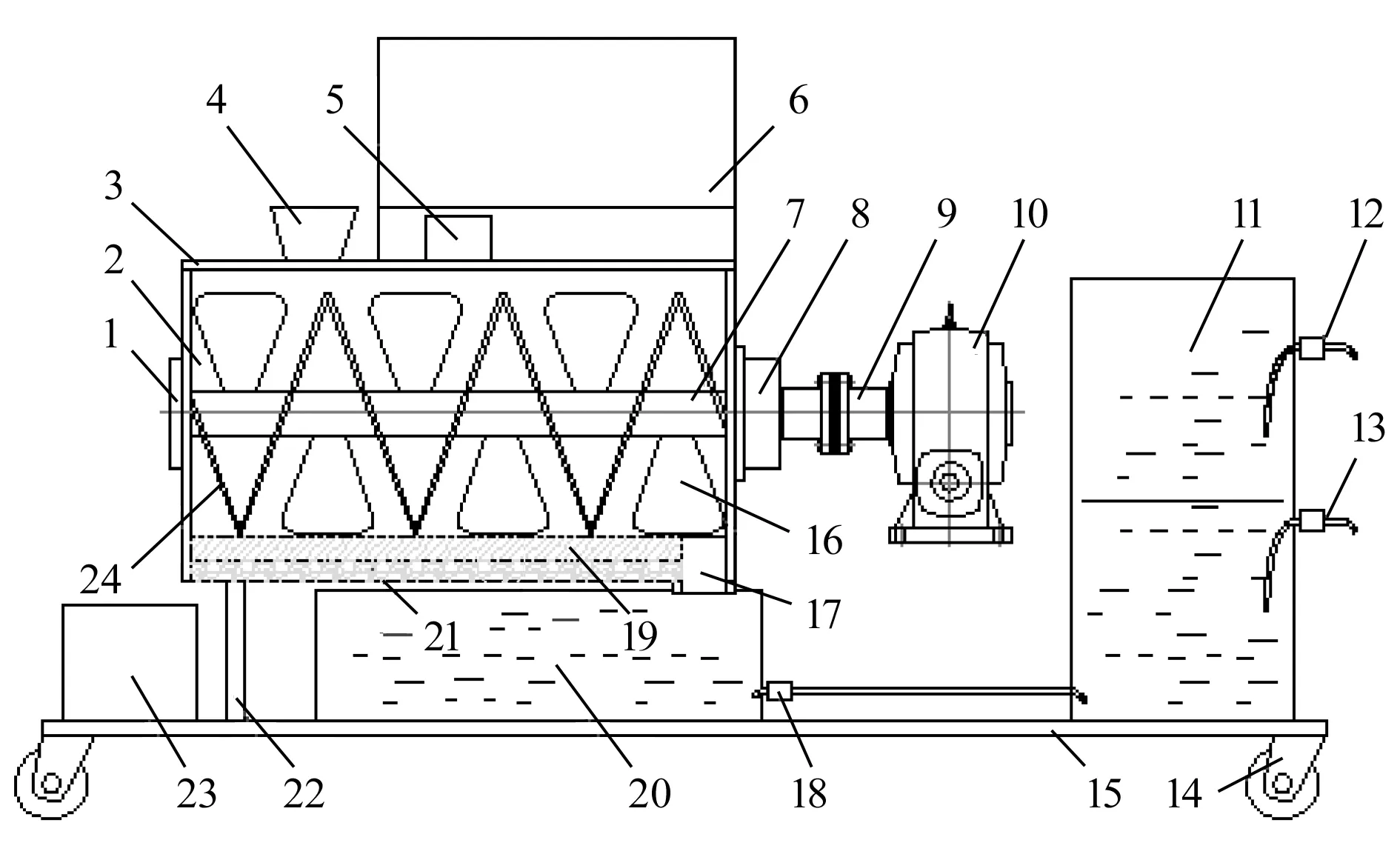
1—法兰;2—降解箱;3—箱盖;4—进料口;5—菌种盒;6—粉碎机;7—搅拌轴;8—轴端法兰;9—联轴节;10—蜗轮蜗杆减速器;11—油水分离箱;12—油泵;13—水泵;14—万向轮;15—底板;16—搅动叶片;17—出液口;18—油水泵;19—加热水套;20—集液池;21—保温层;22—支架;23—出料筒;24—推移叶片
图1 泔水降解机总体方案
从以上工作过程可知,油水分离箱中的传感器需要能够识别油水分界面的高度,这是及时抽走有限容积的分离箱中的油、水的关键所在。
2 油水液位传感器设计
2.1 油水液位传感器原理
油水液位传感器由浮子(浮子上粘贴磁钢)和霍尔元件组成,由浮力原理可知,当物体浸在液体中,如果所受浮力大于其重力时,物体能在液体里悬浮;如果所受浮力小于其重力时,物体在液体里下沉。由于油和水的密度不同,而物体在液体中的浮力与液体的密度有关,因此如果设计的浮子质量和体积满足一定关系,使之能在水中悬浮,而在油中不能悬浮,就能识别出油水分界面的高度。
基于这种思想,设浮子质量为m,其排液体积为V,油液密度为ρ油,ρ油=0.92~0.93g/cm3,水密度为ρ水,ρ水=1g/cm3。根据浮力原理,为了使浮子在水中悬浮而在油中不浮起,则必须满足ρ水gV>mg>ρ油gV,即
ρ水>m/V>ρ油
(1)
从式(1)可以看出,如果浮子的质量与其排液体积之比大于油的密度,且小于水的密度,则能够实现其在水中悬浮而油中下沉的要求。同理,若浮子的质量与其排液体积之比小于油液密度,那么浮子能在油中浮起。所设计的传感器在油水分离箱内的布局示意图如图2所示。

1—双导柱;2—双导柱;3—浮子二;4—磁钢;5—霍尔元件一;6—细丝;7—霍尔元件二;8—霍尔元件三;9—磁钢;10—浮子一;11—细丝
如图2 所示,将霍尔元件感应器分别安装在分离箱壁上,将磁钢分别粘贴在浮子上,并将一根细丝栓在浮子二3下方,细丝6的另一端与箱体底壁相连,细丝6的长度为当浮子二3在水中上升至细丝6绷紧时,浮子二3上的磁钢4的高度刚好达到霍尔元件一5的高度;将另一根细丝11栓在浮子一10上方,细丝11的另一端与箱体上壁相连,细丝11的长度为细丝11绷紧时,浮子一10上磁钢9的高度刚好达到霍尔元件三8的高度,当油水混合液首次进入油水分离箱内时,浮子一、二因未受浮力,浮子一10位于霍尔元件三8的高度,浮子二3位于分离箱底部,随着油水混合液的增多,浮子均受浮力作用先后沿着双导柱上升,当浮子二3在水中上升致使细丝6绷紧时,说明此时分离箱中水的高度已达到或超过霍尔元件的高度,由于细丝的限制,磁钢4与霍尔元件一5感应,发出信号控制水泵工作,此时油泵不工作,水位下降带动液位下降,浮子一、二也随液位高度的下降而下降,设定水泵持续工作至磁钢4与霍尔元件二7感应时,水泵停止工作,此时若磁钢9和霍尔元件三8未发出感应信号,则油泵启动工作;待油位下降至细丝11绷紧,磁钢9与霍尔元件三8感应发出信号时,油泵停止工作。为了保证感应信号对油、水泵的准确控制,霍尔元件二7的安装位置要比霍尔元件三8的安装位置略低(比如1cm)。油、水分别抽完后,新的油水混合液进入油水分离箱,进行油水分离,如此反复,实现泔水的油水分离。
2.2 传感器参数确定
浮子二材料为尼龙,形状为正方形,边长为6.0cm,导柱孔直径0.8cm,由于尼龙密度为1.15g/cm3,其密度不满足式(1)要求,因此浮子二必须采用中空结构,如图3所示,中空部分为正方体,其边长为3.3cm,这样浮子二的质量m2为:
m2=(6.03-3.33-2×6.0×π/4×0.82)×1.15=200.14g
浮子二排液体积V2为: V2=6.03-2×6.0×π/4×0.82=209.97cm3那么,m2/V2=0.953g/cm3,满足式(1)要求。
同理,为使浮子一在油中浮起,浮子一也为中空结构。中空部分为正方体,经计算设定其边长为3.6cm,其余参数与浮子二相同。
3 实验验证
实验装置由油水液位传感器、水液位传感器、集液池、分离箱、油水泵、油泵和水泵组成,控制器采用三菱PLC,人机交互界面采用GOT1000型触摸屏。实验装置接线图如图4所示。
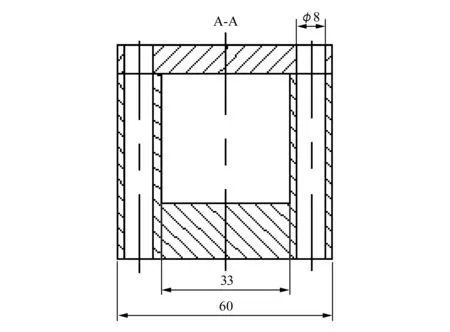
图3 浮子二的二维剖面图
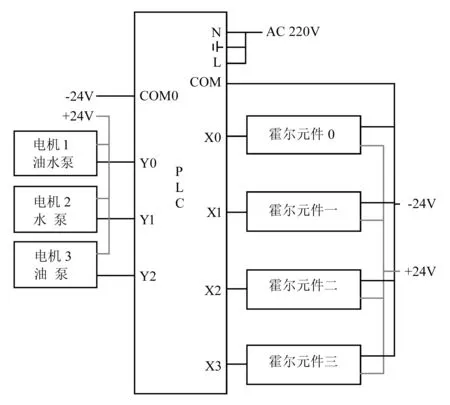
图4 实验装置接线图
当集液池中积满油水混合液时,电机1带动油水泵将固液分离后的油水混合液抽至油水分离箱,其中电机1动作由霍尔元件0对应的液位传感器控制,该液位传感器所用的浮子可与浮子一相同,因为浮子一在纯油中能够浮起,其在油水混合液中也一定能浮起。电机2由霍尔元件一、二及浮子二(上面粘有磁钢)控制,以此控制水泵的启动和停止,电机3由霍尔元件二、三及浮子一(上面粘有磁钢)控制,以此控制油泵的启动和停止,其自动控制流程图如图5所示。
油水分离液位传感器在油水分离箱内实物布置实验图如图6所示。
4 结束语
本文采用自制的浮子、磁钢与霍尔元件相结合并利用浮力原理设计的液位传感器,经过实验验证,能够及时识别出油、水液面的高度,经PLC输出信号,利用油泵和水泵分别排出油和水,从而实现油水分离。该液位传感器成本低,易于与控制系统相连接,解决了油水分离集油系统自动工作问题,降低油中水的含量,提高了油水分离的工作效率[5],为泔水的油水分离自动化提供了技术支撑。
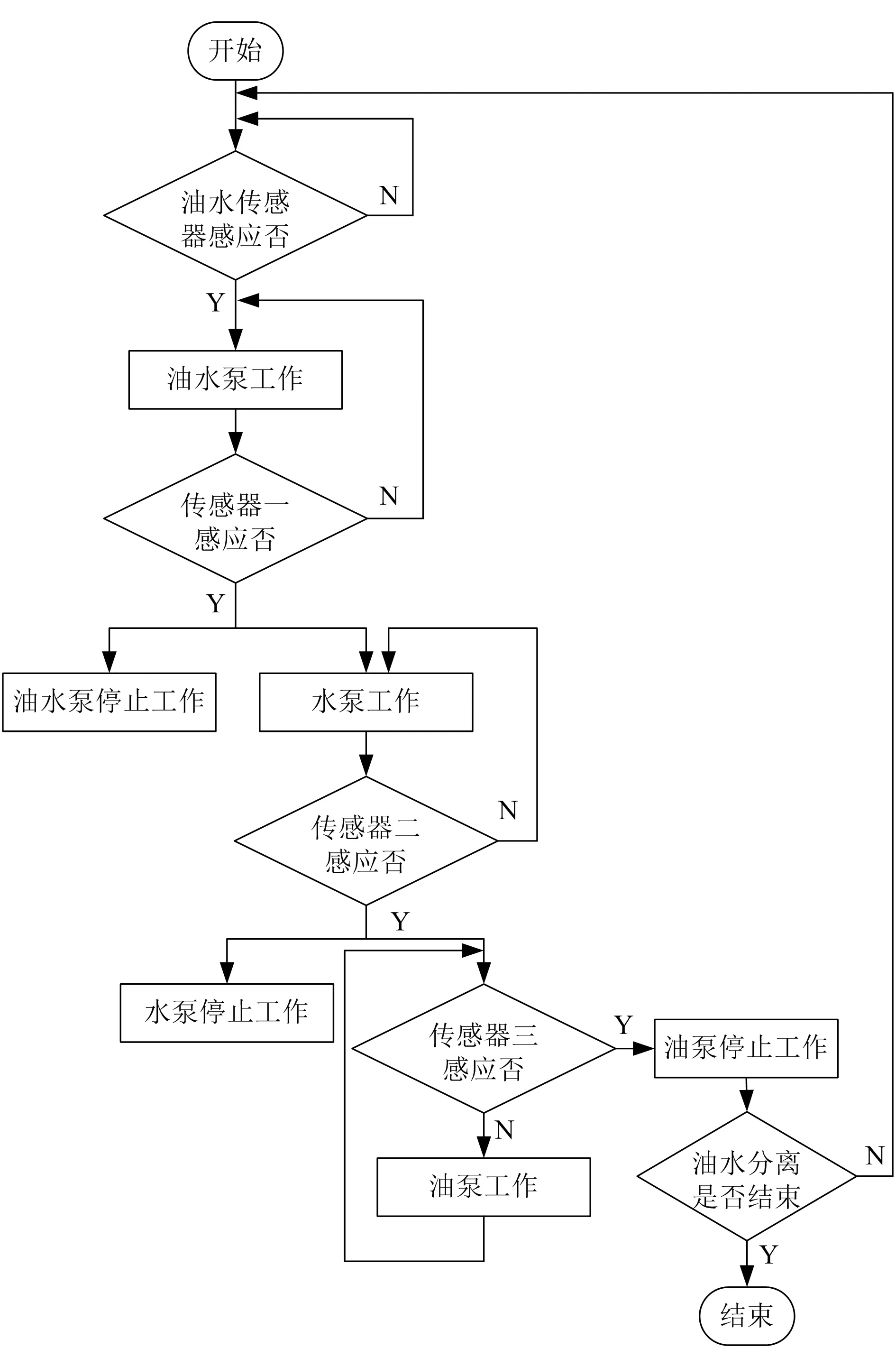
图5 控制系统流程图
图6 油水分离液位传感器实验图
[1] 黄伟荣.光纤法布里-珀罗腔液位传感器研究[D].西安:中国科学院研究生院(西安光学精密机械研究所),2004.
[2] 沈川,郭烈恩,宋心鑫.GSJ500 型泔水处理机[J]. 机械工程师,2009(8):47-48.
[3] 昋永强.餐厨废弃物油脂回收工艺及设备的研究与设计[D]. 银川:宁夏大学,2014.
[4] 徐可可,李积彬,姚旺.基于餐厨垃圾处理设备的新型油水分离器[J].机电工程技术,2009(10):77-78,87.
[5] 李乐.油水分离集油系统关键技术研究[D].济南:山东大学,2014.
The development of the liquid level sensor to oil-water separation in kitchenware swill
ZHOU Li, ZHU Xinglong, LI Luyang, SUN Zhao, DING Jun
(School of Mechanical Engineering, Yangzhou University, Jiangsu Yangzhou, 225127, China)
This paper develops a device to recycle and preprocess swill. It applies the beneficial degraded bacteria and stirs the bacteria, lets it contact with the solid fat in swill (such as fat, etc.) and decompose the solid fat, then filters swill with solid-liquid separation and separates the oil and water mixture through the separation tank. Aiming at detecting the height of oil and water after the oil-water separation and the manufacture costs, it designs a liquid level sensor, which can identify height of oil and water. The paper describes the working principle, design parameters of the sensor. The test results show that the sensor is able to identify oil and water, provide technical assurance for extracting oil and water automatically.
kitchenware swill;oil-water separation;liquid level sensor to oil-water separation
10.3969/j.issn.2095-509X.2015.09.013
2015-07-23
2012产学研市校合作项目(2013038-14)
周丽(1989—),女,江苏南通人,扬州大学硕士研究生,主要研究方向为机械电子工程。
TH122
A
2095-509X(2015)09-0048-04
