基于增益自调整PID的楔形离合器换挡性能优化控制
2015-01-07姚健陈俐殷承良ChunhaoLee黄颖
姚健陈俐殷承良Chunhao Lee黄颖
(1.通用汽车全球研发中心;2.上海交通大学)
基于增益自调整PID的楔形离合器换挡性能优化控制
姚健1陈俐2殷承良2Chunhao Lee1黄颖1
(1.通用汽车全球研发中心;2.上海交通大学)
楔形离合器在放大驱动力的同时放大了系统的输入误差,使得楔形离合器对参数与工况的变化更加敏感。提出一种自调整机制实时调整PID增益参数进行离合器转速差跟踪控制。该自调整机制通过李雅普诺夫稳定性理论进行推导,以确保控制系统的稳定性。在改变不同系统参数和运行工况的情况下,通过仿真和试验结果表明,所提出的控制器具有较好的鲁棒性能,提高了楔形离合器的换挡性能。
1 背景介绍
楔形离合器由于具有楔形机构的自增力特性,能够有效放大驱动力。利用此特征设计机电执行机构来驱动自动变速器中离合器的应用,近年来有了初步的研究进展[1,2]。然而,在放大驱动力的同时,也放大了参数变化对系统的影响以及输入的误差量,从而使得楔形离合器执行机构对参数和工况的变化更为敏感。
传统PID控制器在处理固定目标工况的系统时能够得到很好的控制效果,而对于参数变化范围较大或工况复杂的系统,其控制性能将大大变差,甚至还会出现不稳定的情况[3]。另外,对于变速器中离合器的控制又有其特有的问题与难点,如离合器接合控制过程时间短暂,要求控制系统具有快速的响应性能;又如离合器接合过程转速差的控制目标为迅速平稳的减小为零,而非一个固定值。这些与传统控制过程所不同的问题给PID控制器提出了新的要求。
本文首先采用理想参考转速差曲线的方法来简化离合器接合控制的多目标问题,然后通过PID反馈控制器控制楔形离合器执行机构实时跟踪参考转速差曲线,把PID的3个增益看作可调参数,根据离合器实际转速差与参考曲线之间的误差,设计合适的增益参数调整机制实时调整PID控制器以改变其动态性能,提高其在可变参数与不同工况下的跟踪性能。最后,通过仿真研究表明上述控制算法相比于普通PID具有更强的鲁棒性能,并且通过试验验证了其在实际工程中应用的可行性。
2 问题的数学描述
在离合器惯性滑摩阶段,为了使离合器转速差能够平稳的减小为零,一般控制离合器上的正压力保持较小的变化幅度[4,5],而较小的正压力变化使得楔形离合器执行机构也基本保持平衡。因此,可以把楔形离合器执行机构看作稳态情况。在稳态过程中,由于不再考虑执行机构中各部件的动力学关系,而仅存在几何关系,于是其作用于离合器上的正压力与直流无刷电机的控制输入电流可以简化为一个比例关系。根据前面的研究工作[6],楔形离合器执行机构的稳态模型被简化为:
式中,Kt为电机扭矩常数;n为蜗杆传动比;μ为离合器片之间的摩擦系数;Fn为作用于离合器片上的正压力;α为楔形角度;Rc为摩擦片等效半径;Tm为电机输出扭矩;Twg、Twb为蜗轮与楔形块之间的相互作用扭矩。
作用于离合器片上的正压力与驱动电机的电流可以表示为一个比例关系,其中主要包含了楔形机构的自增力特性以及其他几何关系:
式中,u=Im是驱动电机的电流输入;K是从电机到离合器片的增益系数。
楔形机构的自增力特性虽然起到了增大电机作动力的目的,但是同时也放大了系统的输入误差,使得系统对参数或工况变化的更为敏感。以离合器片摩擦系数的时变为例,根据方程(4),用图1表示楔形离合器增益系数与摩擦系数之间的关系。一般来说,为了获得较大的自增力倍数而选择合适的楔形角使得其正切值接近离合器片的摩擦系数值。从图1中较大的增益系数区域可以看出,即便较小的摩擦系数值变化也会引起较大的增益系数变化,从而引起离合器片上正压力和摩擦扭矩的较大变化。因此,为了克服对系统参数或工况变化的敏感性,楔形离合器需要较强鲁棒性的控制器。
3 楔形离合器动力学建模
对于自动变速器的升挡过程,执行机构通过控制两个离合器同时进行接合与分离。整个过程可以分为间隙填充阶段、扭矩切换阶段、惯性滑摩阶段及换挡结束阶段等4个阶段。本文中主要研究对换挡性能影响最大的惯性滑摩阶段,例如1挡到2挡的升挡过程。在惯性滑摩过程中,1挡离合器已经被分离,而2挡离合器处于正在接合状态[7]。2挡离合器滑摩过程的动力学状态如图2所示。
在惯性滑摩阶段,由于1挡离合器所传递的扭矩已经被分离释放或下降为很低的水平,可以认为发动机扭矩全部由2挡离合器传递。所以,2挡离合器驱动部分的动力学方程如下:
式中,ωdr是离合器驱动部分的旋转速度;Tt是用来驱动离合器液力变矩器的输出扭矩;Idr表示驱动部分的等效转动惯量;N和Cdr分别表示摩擦面数和阻尼系数。
对于离合器被动部分,其动力学方程如下:
式中,ωre是离合器被动部分的旋转速度;Tv表示来自车辆的等效阻力矩;Ire表示离合器被动部分的等效转动惯量;Cre表示阻尼系数。
作用于离合器片上的正压力则由楔形离合器执行机构的稳态模型方程(4)所表述。
4 增益自调整PID控制器的设计
整个增益自调整PID控制策略框图如图3所示。目标期望输出为连续时变的参考曲线,通过定义理想的离合器滑摩参考曲线使其满足离合器接合过程的多目标控制(换挡过程的平顺性与滑摩时间的短时性)。PID增益参数的自调整机制通过李亚普诺夫稳定性理论进行设计。
为便于控制器设计,将上述离合器模型进行重新表述,方程组如下所示:
式中,x1=ωdr;x2=ωre;y表示离合器片滑摩转速差;ai、bi和ci(i=1,2)分别为对应的比例系数。
普通PID控制器的目标在于实时跟踪离合器滑摩转速差的目标yd。因此定义跟踪误差为e=y-yd。而PID反馈控制器的输出则作为楔形离合器执行机构的输入量:
式中,KP、KI和KD分别为PID控制器的3个可调增益参数。
为了实时计算PID的最优化增益参数值,分别定义了各增益参数的计算误差:
定义李亚普诺夫方程(其中包括转速差跟踪误差和PID各参数的计算误差):
式中,δi>0(i=1,2,3)为自调整机制的各增益系数。
对上述方程求微分得到:
把方程(7)和方程(8)代入上式,则可以得到:
由方程(13)~方程(16)可以得到:
在方程(20)中,离合器被动部分的旋转速度x2与车速成正比。然而,在换挡过程的短暂时间内,一般可以认为车速恒定不变。于是,对应的离合器被动部分的旋转速度也可以认为恒定不变,得到上述方程(20)可以简化为:
从方程(21)中可以看出,若满足方程(22)的条件,那么由于a1<0而得到方程(23)成立:
根据李亚普诺夫稳定理论可以得出控制系统是全局渐进稳定的。因此,从方程(22)中可以得到PID控制器各增益参数的自调整机制为:
综上所述,通过由方程(24)表达的增益自调整机制所得到的PID控制器进行离合器滑摩转速差跟踪参考曲线的系统稳定。
5 基于仿真的分析与讨论
为了验证上述控制算法的有效性,利用MATLAB/ Simulink模块,对上述提出的增益自调整PID控制算法与普通PID控制算法分别进行了建模,并且集成到完整的整车动力传动系统模型中进行仿真研究[8],其整车参数如表1所示。利用三次多项式曲线作为离合器滑摩转速差的参考曲线,将离合器的多目标控制简化为单目标问题[9]。
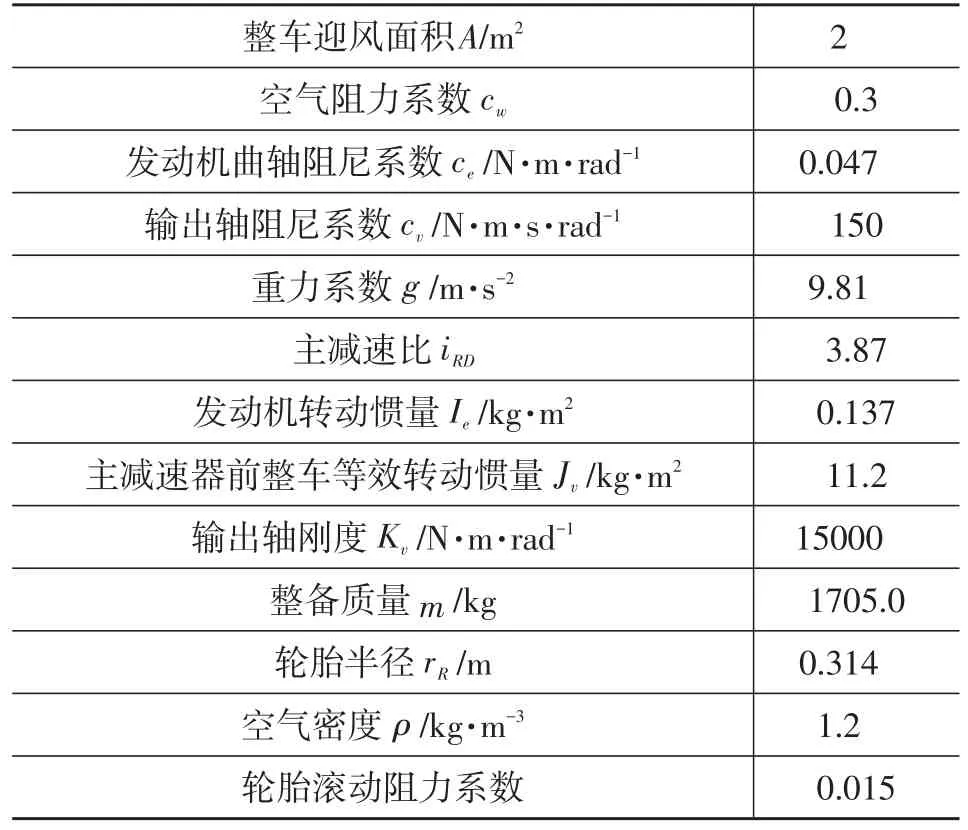
表1 车辆动力传动系统参数
仿真研究过程如下:首先在基本工况下完成15%油门开度下的1挡到2挡的升挡过程,然后在改变摩擦系数值和离合器滑摩时间工况下比较两种控制算法对参考滑摩曲线进行跟踪的效果。
5.1 基本工况
图4给出了基本工况下普通PID与增益自调整PID控制仿真结果的比较。在15%油门开度下,整车完成1挡到2挡的升挡过程,其换挡点为发动机转速约2 000 r/min,车速约为15.5 km/h。此时所对应的2挡离合器初始转速差约为1200 r/min。根据离合器滑摩转速差曲线,定义Δω0=1 200r/min,离合器滑摩时间为tf-t0=700ms。在此工况下,对普通PID和自调整PID控制器的参数分别进行最优化,得到具体参数为KP=0.1,KI=15,KD=0.01,δ1=0.05,δ2=0.5,δ3=0.00001。
从仿真结果可以看出,在离合器惯性滑摩阶段,转速差按照预期在700 ms左右平稳减小为零,并且能够很好的跟踪参考曲线,除转速差接近零附近产生了一些微小偏差之外,实际离合器转速差曲线与参考曲线基本重合。在离合器滑摩结束前,增益自调整PID控制器实际转速差与参考转速差之间的偏差量要小于采用普通PID控制器跟踪的偏差量。
从图4还可以看出,随着离合器转速跟踪误差量的变化,其PID的3个增益参数也随之相应变化。尤其是当误差量较大时,增益参数的变化幅度明显增大,从而迅速改变了PID反馈控制的动态响应特性,使得控制误差能够更快的被收敛。尽管上述两种控制器的仿真结果略有差异,但是都得到了较好的离合器滑摩转速差跟踪效果和变速器换挡性能。为了考察控制器在不同车辆参数和工况下的性能,进行了改变离合器参数和车辆工况情况的仿真研究。第一种情况:考虑到离合器片长时间工作而导致的温度上升或过度磨损均引起摩擦性能的衰退,因此通过减小离合器片摩擦系数值进行研究;第二种情况:通过缩短离合器目标滑摩时间长度来模拟不同的车辆行驶工况。
5.2 摩擦系数减小
图5表示离合器片摩擦系数值在上述基本工况下减小0.03的情况下,采用普通PID和增益自调整PID控制器仿真的结果。仿真模型的其他参数及换挡工况不变,仍然以15%的油门开度进行车辆加速以实现1挡到2挡的换挡过程,并且控制器参数与上述基本工况中一致。
从图5中可以看出,在普通PID控制器下,仿真的各项参数曲线出现了较大波动。摩擦系数减小相当于离合器中的摩擦扭矩减小,从而使得离合器转速差在滑摩初始阶段迅速大于参考曲线。此时在PID反馈控制的基础上增大电机驱动电流,离合器转速差迅速减小,直至小于参考曲线。PID又调整输出,减小电机驱动电流,使得离合器转速差缓慢减小,如此循环直至转速差减小为零。整个过程,离合器转速差跟踪误差明显增大。从图5b中可以看出,离合器实际转速差曲线与参考转速差曲线虽然存在一定误差,但是与采用普通PID控制器仿真的结果相比,采用增益自调整PID控制器后,跟踪性能得到了明显提高,最大跟踪误差量从100 r/min减小为约60 r/min。
5.3 滑摩时间不同
在图4基础上,缩短离合器目标滑摩时间为600 ms,其他参数条件保持不变,采用两种控制器的仿真结果比较如图6所示。
由于缩短了参考曲线的滑摩时间,实际离合器转速差初始阶段很快偏离了参考曲线,产生误差。随后,在PID中进行调整。虽然在离合器滑摩结束时,跟踪误差得到了有效减小,但在整个滑摩过程中仍然产生了最大约100 r/min的跟踪误差。而采用增益自调整PID控制器后,离合器转速差跟踪误差在一开始就明显得到了很好的抑制而没有增大,而且在跟踪参考曲线的整个过程中,控制器对离合器的控制调整始终没有出现较大的误差量。最终,在PID参数的自调整过程中,其跟踪最大误差量从100 r/min减小为约50 r/min。
6 台架试验验证
为了进一步验证上述控制算法的有效性,将dSPACE控制器集成到带楔形离合器的变速器测试台架进行试验验证[10,11]。试验中采用提高变速器运行温度而使摩擦片温度大幅升高的方法来获得摩擦特性的衰退。通过变速器油温控制设备将油底壳温度由基本工况下约50℃加热到110℃,而此时摩擦片温度超过了120℃,其对应的普通PID和增益自调整PID控制试验结果如图7所示。
由于温度大幅度上升导致摩擦特性的衰退,离合器片上的摩擦力矩相应减小,在滑摩初始时刻其转速差减速缓慢,迅速与参考曲线之间产生了较大误差。在PID反馈控制的作用下,产生了较大的跟踪误差。在普通PID控制器上增加了增益自调整控制后,误差得到了有效抑制。在普通PID控制器下最大跟踪误差量达到150 r/min,而在增益自调整PID控制下最大跟踪误差量减小为50 r/min,优化效果较为明显。
1 Kim J.,and Choi S.B.Design and Modeling of a Clutch Ac⁃tuator System With Self-Energizing Mechanism.IEEE/ ASME Transactions on Mechatronics,2011,VOL.16,NO.5,pp.953~966.
2 Kim J.,Choi S.B.Adaptive Force Control of Automotive Clutch Actuator System with Self-Energizing Effect.Pre⁃prints of the 18th IFAC World Congress,2011.
3 Nuella I.,Cheng C.,and Chiu M-S,Adaptive PID Control⁃ler Design for Nonlinear Systems.Industrial and Engineer⁃ing Chemistry Research,2009,48,pp.4877-4883.
4 Watechagit S.and Srinivasan K.On-Line Estimation of Op⁃erating Variables for Stepped Automatic Transmissions.Pro⁃ceedings of 2003 IEEE Conference on Control Applica⁃tions,Vols 1 and 2,2003.
5 Watechagit S.and Srinivasan K.Implementation of On-Line Clutch Pressure Estimation for Stepped Automatic Transmis⁃sions.2005 American Control Conference,June 8-10,2005.Portland,OR,USA.
6 Jian Yao,Li Chen,and Chengliang Yin.Modeling and Sta⁃bility Analysis of Wedge Clutch System.Mathematical Prob⁃lems in Engineering,Volume 2014(2014),Article ID 712472,12 pages,2014.
7 Shushan Bai,Robert L.Moses,Todd Schanz and Michael J.Gorman,“Development of a New Clutch-to-Clutch Shift Control Technology,”SAE Technical Paper 2002-01-1252.
8 Jian Yao,Li Chen,Chengliang Yin,Jie Shu,Xin Zheng,Chunhao J.Lee,Yu Dong,Chi-kuan Kao,Kumar Heb⁃ bale,and Farzed Samie.Modeling of a Wedge Clutch in an Automatic Transmission.SAE technical paper 2010-01-0186,2010.
9 Gao B.Z.,Chen H.,Sanada K.,and Feng Y.Design of Clutch-Slip Controller for Automatic Transmission Using Back Stepping.IEEE/ASME Transactions on Mechatronics,2011,VOL.16,NO.3,pp.498~508.
10 Jian Yao,Li Chen,Fengyu Liu and Chengliang Yin.Ex⁃perimental study on improvement in the shift quality for an automatic transmission using a motor-driven wedge clutch.Proc.IMechE Part D:J Automobile Engineering,2014,Vol.228(6),pp.663~673.
11 Jian Yao,Li Chen,Fengyu Liu,Chengliang Yin,Chun⁃hao J.Lee,Yu Dong,Ying Huang,Chi-kuan Kao,and Farzed Samie.Experimental Validation of a Wedge Clutch in Automatic Transmissions.VTI 2012 conference paper.
(责任编辑帘 青)
修改稿收到日期为2015年2月1日。
Optimization Control of Wedge Clutch Shifting Performance Based on Gain Self-tuning PID
Yao Jian1,Chen Li2,Liu Fengyu2,Yin Chengliang2,Chunhao Lee1,Huang Ying1,Chi-kuan Kao1,Farzad Samie1
(1.GM Global Research Center;2.Shanghai Jiaotong University)
The wedge clutch utilizes self-reinforcement feature to amplify the driving torque,however,the input variation is also amplified which makes the system more sensitive to variation of the system parameters and working conditions.In this paper,a self-tuning PID gain parameter is proposed to track the clutch speed difference.The Lyapunov theory is applied in the self-tuning adaptive control to ensure the control system stability.Finally,simulation and experiment demonstrate that the proposed controller has good robustness,improving the shift performance of the wedge clutch under different system parameters and operating conditions.
Wedge clutch,Self-tuning PID,Shift performance,Robustness
楔形离合器 自调整PID 换挡性能 鲁棒性
U463.211
A
1000-3703(2015)06-0010-06
