基于模糊PID 电流跟踪控制的EPS 仿真分析
2014-12-30贾满满朱景全
贾满满,朱景全
(商丘师范学院 物理与电气信息学院,河南 商丘 476000)
0 引言
电动助力转向系统(EPS)依靠转向稳定、环保、节能等优点正逐步取代液压助力转向系统成为现代汽车转向系统的发展方向.该系统能够根据汽车方向盘转矩、车速和路面状况等通过助力电机为驾驶员实时提供合适的助力,使得转向更加轻松,保障驾驶员在各种工况下都具有最佳的转向路感[1,2].目前,针对助力电机控制的设计方法主要有基于经典控制理论的助力电机电流闭环控制和基于现代控制理论状态空间模型的H∞控制两种方法.文献[3]采用了基于常规PID 的电机电流跟踪控制,取得了较好效果,但是系统存在参数相对固定,自适应能力弱的弊端.文献[4]采用H∞鲁棒控制提高了系统的稳定性和抗干扰能力,但同时也增加了控制系统的复杂性,对控制芯片的计算能力提出了更高的要求.文献[5]在单一路面工况下对汽车的转向轻便性进行了仿真分析,但没有涉及汽车在不同摩擦系数路面工况下转向时的助力仿真研究.文献[6]建立了EPS 的数学模型,仿真结果证明其可以实现理想的助力特性,但是没有将驾驶员模型与车速考虑在内,所得结论具有一定的局限性.
本文采用模糊自适应PID 控制策略对助力电机目标电流进行跟踪控制,通过加载驾驶员模型和在不同车速与路面情况下对系统常规助力控制和阻尼控制方式的仿真分析,仿真结果表明了该策略控制参数调整方便,控制算法简单实用,具有抗路面干扰能力.
本文的组织结构如下:第一节针对EPS 的结构模型描述搭建了数学模型;第二节根据系统的控制策略要求设计了电机目标电流跟踪控制器,并对电机电流采取了补偿措施;第三节中对EPS 系统的轻便性,路感,抗干扰能力进行了仿真分析;第四节进行了总结.
1 EPS 系统的数学模型
1.1 结构原理
图1 为EPS 系统的结构简图:EPS 系统由转向柱、车速传感器、扭矩传感器、电子控制单元(ECU)、助力电机、电磁离合器、减速机构等组成.工作时电磁离合器闭合,系统将ECU 单元采集到的车速、方向盘转矩信号作为输入,将控制器计算出的电机助力转矩作为输出,通过减速机构传至转向柱为驾驶员提供助力.

图1 转向柱式助力转向系统Fig.1 Electric power steering system of column

图2 EPS 控制结构图Fig.2 The structure control diagram of EPS
1.2 数学模型的建立
转向柱及齿轮齿条动力学模型为[3,4]:

助力电动机动力学模型为[5]:

驾驶员动力学模型为:

扭矩传感器数学模型为[6]:

式中Td,Ta,Tc,Tm分别为方向盘转矩、电机助力转矩、扭矩测量转矩、助力电机转矩,θs,θm分别为方向盘参考输入转角、方向盘实际转角、电机转角;U,L,R,ia分别为电机的电压、电感、电阻、电流;xr为横拉杆位移;Js,Jm分别为转向柱和电机的转动惯量;FTR为转向负载;Bs,Bm,Br分别为转向柱阻尼系数、电机阻尼系数、转向横拉杆阻尼系数;Ks,Km分别为转向柱的刚度和电机的刚度;Mr为转向横拉杆质量,Rs为转向小齿轮半径;Ka,Kb分别为电机电磁转矩和反电动势系数;G 为齿轮传动比;Kp1,Ki1,Kd1为驾驶员模型参数.
2 EPS 系统控制器的设计
2.1 控制策略要求
汽车在不同的行驶速度下转向时,助力电机根据助力特性曲线确定的目标电流为驾驶员提供合适的辅助转矩,在低速行驶时保证汽车转向轻便灵活,在高速行驶时保证汽车转向稳定可靠,保证驾驶员获得良好的路感;此外当汽车受到较大路面侧向冲击时系统还能够抑制方向盘的抖动,实现转向光滑平稳.依据上述要求设计的电动助力转向系统控制策略如图2 所示.
2.2 EPS 系统电流跟踪控制器设计
常规助力控制器的核心问题是如何快速准确的跟踪电机目标电流,从而使电机提供合适的助力.本文采用模糊自适应PID 闭环控制结构,根据输入电机目标电流与输出实际电流的偏差以及偏差变化率在线调节PID 参数,使实际电流与目标电流达到一致.该控制器克服了常规PID 控制参数固定不变的弊端,使系统的跟踪性和自适应能力大大改善.设计方法如下:
控制器将电流误差e 和误差变化率de 作为模糊推理控制器的两个输入,其变化范围分别为[-15,15]和[-7,7],同时将其划分为七个模糊子集{NB,NM,NS,ZE,PS,PM,PB}.在线整定三输出变量△kp,△ki,△kd的变化范围分别为[-2,2],[-0.6,0.6],[-0.02,0.02],同样划分为七个模糊子集{NB,NM,NS,ZE,PS,PM,PB},输入输出变量的隶属函数均采用三角形隶属度函数[7].
同时为抑制不平路面对方向盘产生的力矩抖动干扰,在跟踪目标电流的基础上引入电机转速,对电机目标电流进行阻尼补偿,可以减轻驾驶员转向的沉重感.补偿后电流为:

式中,I'为电机补偿后电流,I 为电机电流,kω为阻尼补偿增益.电流跟踪控制器的设计如图3 所示:

图3 电流跟踪控制器模块Fig 3 Current Follow Control Model

图4 助力电机电流跟踪对比Fig.4 The compare of assistant motor current
3 EPS 系统仿真与分析
采用上述控制策略进行不同路面下汽车原地转向的轻便性仿真,阻尼控制仿真.仿真所用到的参数如表1 所示.
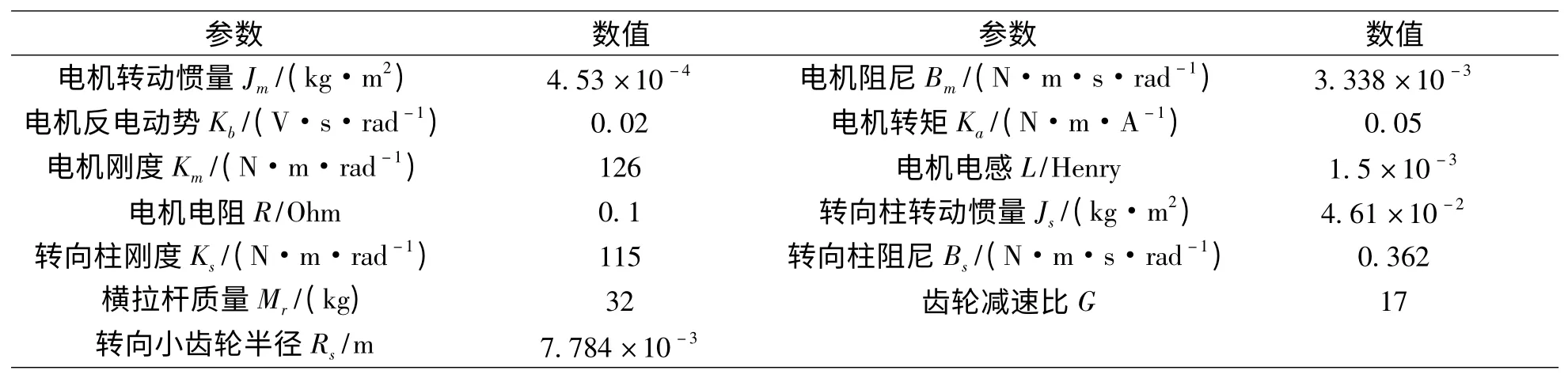
表1 EPS 系统参数Table 1 Parameters of EPS system
3.1 电流跟踪响应
图4 为V=40 Km/h 时方向盘正弦输入(模拟方向盘左右打转)时电流跟踪情况.与常规PID 电流跟踪策略相比,助力电机实际电流能较好地跟踪目标电流.
3.2 EPS 转向轻便性仿真分析
汽车在转向时,转动方向盘需要克服的摩擦力有:轮胎与地面间的摩擦力,回正力和转向传动系统中存在的各种摩擦力,这些力决定了汽车转向系统的负载特性.在特定的轮胎和路面情况下,转向系统负载特性FTR由Kr,Br决定.

Kr为转向负载弹性系数,与路面的摩擦系数有关.分别在三种不同路面情况下对汽车原地转向进行转向轻便性仿真验证.仿真结果如图5、6 所示.

图5 原地无助力方向盘转矩与转角关系Fig.5 Relation of steering torque and steering angle with non-assist power in situ

图6 原地有助力方向盘转矩与转角关系Fig.6 Relation of steering torque and steering angle with assist power in situ
通过不同路面工况下方向盘转矩对比分析,EPS 的助力控制使原地转向时转动相同角度所需转矩大为减小,显著提高了转向轻便性,减轻了驾驶员的疲劳强度.
3.3 EPS 阻尼控制仿真分析
在汽车行驶过程中,由于路面不平,车轮产生的扰动会作用在方向盘上,造成驾驶员“打手”,特别是在汽车高速行驶时.为了提高汽车高速行驶的稳定性及驾驶舒适性,须进行阻尼控制.研究转向阻力矩对方向盘扭矩的影响,将方向盘固定,以齿条受到的冲击力为输入.

图7 EPS 系统阻尼控制Fig.7 Damp control of C-EPS system
为模拟汽车受到的地面反向冲击,V=40 Km/h 时在系统转向系中加入一个幅值为400 N,频率为10 Hz 的正弦冲击波,以此来观察阻尼控制对系统的控制效果.仿真结果如图7 所示.
仿真表明与不加电流补偿的无阻尼控制相比,阻尼控制可以很好的抑制由于外力冲击给方向盘带来的转矩波动,转速变化较为平缓,转速波动减小,缓解了高速时驾驶员感觉方向盘“过于灵活”的情况.
4 结论
本文基于EPS 电流跟踪问题,设计了模糊自适应PID 控制策略,仿真结果表明助力电机实际电流能较好地跟踪目标电流针.针对路面干扰对电机电流进行了补偿,当转向速度非常快时,助力转矩能快速减小且跟随方向盘的转动频率,从而使驾驶员保持一定的手感.仿真表明,加入阻尼控制后的EPS 系统,可以明显改善系统动态性能,使汽车高速行驶时转向更加平稳.
[1]Anthony W.Burton.Innovation Drivers for Electric Power-Assisted Steering[J].IEEE Control Systems Magazine,2003,12:30-39.
[2]吴锋,杨志家,等.电动助力转向系统控制策略的研究[J].汽车工程,2006,28(7):676-680.
[3]施国标,申荣卫,林逸.电动助力转向系统的建模与仿真技术[J].吉林大学学报,2007,37(1):31-36.
[4]赵治国,余卓平,等.电动助力转向系统控制控制研究[J].汽车工程,2005,27(6):730-735.
[5]赵林峰,陈无畏,等.基于转向轻便性及回正性能设计的EPS 应用[J].机械工程学报,2009,45(6):181-187.
[6]田大庆,殷国富.EPS 动力学状态空间建模及控制鲁棒性设计仿真[J].四川大学学报,2005,37(2):191-196.
[7]薛定宇.控制系统计算机辅助设计[M].北京:清华大学出版社,2006.379-383.
