ADCP方向谱估计的倾斜修正算法研究
2014-12-03郑威杨立惠力刘敏王志
郑威,杨立,惠力,刘敏,王志
(山东省科学院海洋仪器仪表研究所,山东青岛266001)
声学多普勒流速剖面仪(ADCP)是用来测量不同深度上海水流速的仪器。美国RD公司“骏马”系列ADCP上安放有姿态传感器,可以测量得到俯仰角(pitch)和横滚角(roll),当ADCP安放在船上的时候,姿态角时刻不断变化,需要对ADCP的每组测量值进行倾斜修正。而当坐底式ADCP安放在水底的固定的支架上时,姿态角变化较小,不用对每组数据进行倾斜修正,只有当姿态角较大时才需要进行倾斜修正。
RD公司技术文献没有给出倾斜状态下方向谱的计算方法,本文通过旋转矩阵的引入给出了倾斜状态下方向谱估计方法。RD公司商用软件WAVESMON选取当倾斜姿态角大于10°时进行修正[1-4],而当使用坐底式ADCP时,实测数据姿态角大于10°的情况不多,小于10°的姿态角同样会带来较大误差,所以为了得到尽可能准确的估计值,通常是对每组数据进行倾斜修正[5]。我们研究发现当ADCP处于倾斜条件下,方向谱估计误差不仅需要考虑姿态角,同时还必须要考虑到ADCP的安放深度。本文重点研究不同倾斜状态下,ADCP倾斜姿态角和安放深度对于方向谱估计的影响,并以RD公司JANUS配置为例进行说明。
1 方向谱估计基本原理
Isobe在1984年利用方向谱和互谱间的关系来进行方向谱估计,这也是目前为止最常用的方向谱估计基本理论[1]。假定波浪振幅很小且由多数组成波迭加而成,可推导出任意两个波浪特性间的互谱等于相应波浪特性与波面间的传递函数的乘积的傅里叶变换,即

f代表海浪频率,k代表波数,φmn(f)代表第m个测点上和第n个测点波浪特性之间的互谱,Hm是波浪特性m的传递函数,S(f,θ)代表海浪方向谱,xmn,ymn分别代表m和n测点之间的距离在x和y轴向上的投影距离。
在实际海洋方向谱估计过程中,记录不同测点位置处的时间序列,然后求得不同测点之间的互谱。由方程(1)可知,方程左侧的互谱是已知量,当测量物理量选定后,不同物理量对应的传递函数H通过线性波浪理论是已知的,方程右侧只有方向谱是未知的,方程(1)求逆运算即可进行方向谱估计,求逆运算过程中使用不同理论可以得到不同的方向谱估计值,所以方向谱估计算法也不是唯一的[1]。
2 倾斜条件下ADCP方向谱估计方法
2.1 ADCP旋转矩阵
坐底式ADCP俯视图如图1所示:
(1)仪器坐标系(X,Y,Z):当从ADCP的表面上看的时候,逆时针方向有3-1-4-2。X轴的方向从波束1指向波束2,Y轴是波束4指向波束3,Z轴在4个波束的中心,从水面表层指向水底。
(2)船舶坐标系(S,F,M),选用右舷,前进,桅杆方向分别代表三个坐标系轴。
(3)大地坐标系(E,N,U),分别为正东,正北,垂直向上,坐标系的方向都是固定的,所以这种坐标系在ADCP中是最常用的参考坐标系。
姿态传感器测量的是舰船坐标系相对于大地坐标系的角度(见图2)。在右手原则下,分别相对于S轴和F轴逆时针转动,Tilt1(pitch)和Tilt2(roll)值为正值。
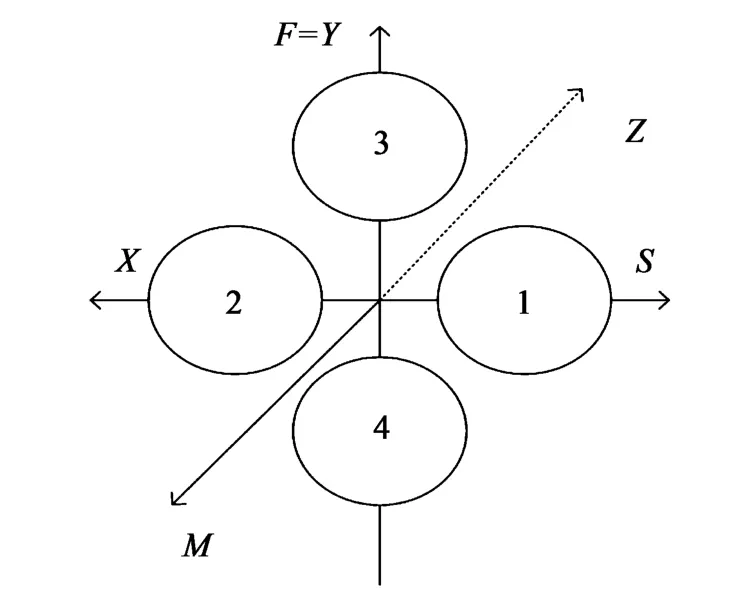
图1 坐底式ADCP俯视图Fig.1 Top view of upward-looking ADCP

图2 ADCP姿态测量Fig.2 Posture measurement of ADCP
大地坐标系的三个轴向是固定的,一般选为参考的坐标系。当无倾斜的时候,仪器坐标系和大地坐标系是在一个水平面内,但ADCP存在倾斜时,就不在同一个水平面内,所以大地坐标系和仪器坐标系存在一个旋转矩阵。因为roll测量的是船舶坐标系下相对于大地坐标系的夹角而不是仪器坐标系和大地坐标系的夹角,所以当使用坐底式 ADCP 时,roll首先要加上 180°[6-8]。
将姿态角组成旋转矩阵
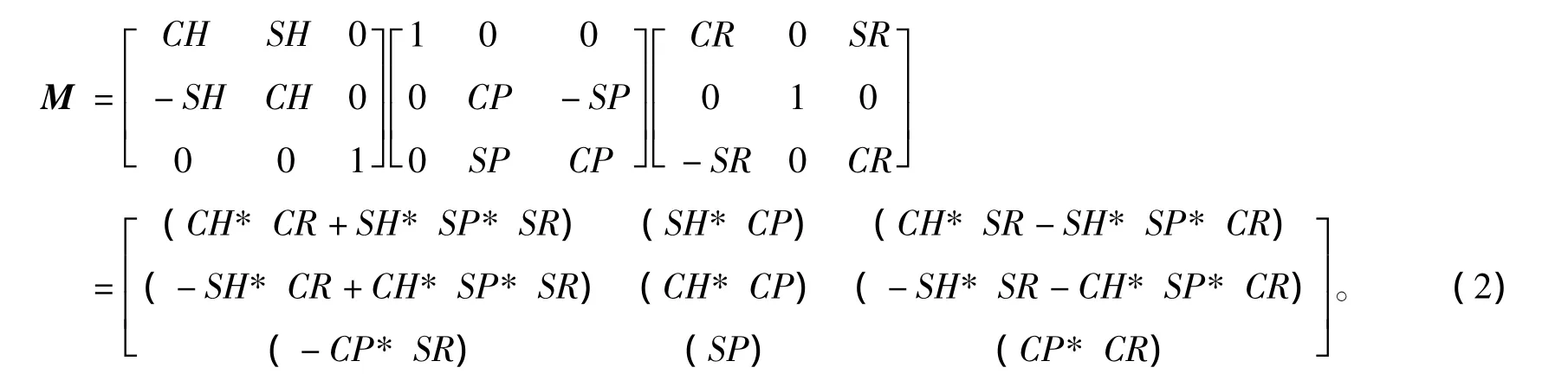
其中 CH=cos(H),SH=sin(H),CP=cos(P),SP=sin(P),CR=cos(R),SR=sin(R),其中 H,P,R 分别代表姿态角heading,pitch,roll。由旋转矩阵的定义可知,应该满足[1]

2.2 ADCP测点倾斜修正方法
ADCP可以利用不同深度上速度测点组成测点阵列,然后利用速度测点阵列通过复杂的反演算法来进行方向谱估计。ADCP一般选取接近表层的3层12个测点来进行方向谱的估计,12个测点组成了一个空间测点阵列,可以利用传统传感器阵列方法来进行方向谱的估计。如图3,当ADCP存在倾斜时,ADCP的4个波束 1,2,3,4 的位置变化到了 1',2',3',4',对应的 ADCP 测点阵列变成了一个倾斜的阵列。
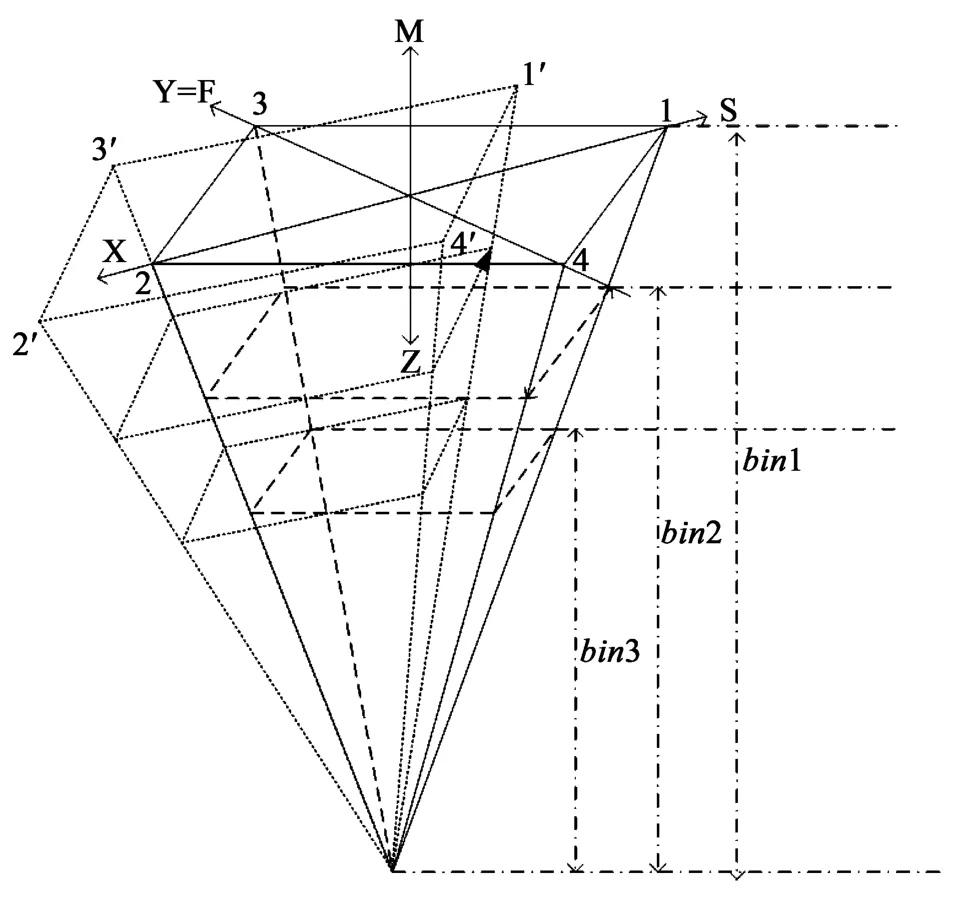
图3 倾斜的ADCP测点阵列Fig.3 Measurement points array of declined ADCP
一般情况下方向谱估计值都是在大地坐标系下,所以首先要求倾斜后阵列中各点在大地坐标下的坐标值。假设无倾斜的ADCP的4个波束和垂直方向的夹角为α,选取的3层测点深度 depth分别为 bin1,bin2,bin3。从图3可知,对应depth有length=depth*tan α,则该层波束 1,2,3,4 在大地坐标系下的测点坐标[x0,y0,z0]分别为(- length,0,depth),(length,0,depth),(0,length,depth),(0,-length,depth)。当 ADCP 倾斜时,对应的测点位置变化到 1',2',3',4',当倾斜较大时,ADCP 的测点位置偏移会导致方向谱估计出现较大误差,所以测量点的位置坐标要进行修正[8-9],倾斜后位置坐标[x0',y0',z0']可以通过下列表达式获取

由此可以得到 ADCP 倾斜后的测点位置为[x0',y0',z0'][9-11]

当知道倾斜后的坐标[x0',y0',z0'],就可以得到对应[x0',y0',z0']的传递函数 H',ADCP 方向谱的倾斜修正本质是计算修正后的测点位置[x0',y0',z0']和相应传递函数H',然后进行方向谱计算。ADCP利用不同深度上测点组成测点阵列进行方向谱估计是ADCP目前反演海洋表面波最常用的方法,这种方法具备高精度,同时,ADCP波束方向的速度值几乎在任何情况下都能得到,这种方法可以在大部分海洋条件下进行工作[12-15]。
2.3 算法实现流程
当ADCP倾斜时,修正的目的就是为了降低倾斜带来的方向谱估计误差。本文仿真和实测数据表明,ADCP姿态角pitch,roll和ADCP安放深度都能影响到方向谱估计值。所以在方向谱的倾斜修正中,RD公司只考虑固定姿态角10°门限(图4a),显然是不能满足实际需要的,所以为了得到准确的估计,考虑姿态角pitch,roll的同时不应该考虑ADCP的安放深度。图4b是本文给出的一种倾斜修正算法,计算如下:
(1)首先设立倾斜修正原则,本文设立的原则是当ADCP倾斜带来有义波高H1/3变化大于指定常数时,需要倾斜修正。其中指定常数要大于ADCP仪器的有义波高测量精度,本文设定该指定常数不小于1%。
(2)在对一组ADCP数据进行方向谱估计之前,首先要考虑到ADCP安放深度,以及姿态角pitch,roll值(其中姿态角pitch,roll要求大于仪器的测量精度,一般为2°)。
(3)通过仿真得到给定的ADCP安放深度和姿态角pitch,roll条件下的方向谱估计误差RMSE,然后通过方程(8)得到有义波高变化ΔH1/3/H1/3。
(4)将仿真得到的有义波高变化根据倾斜修正原则判断是否需要进行倾斜修正。当需要修正时,首先对各测点位置进行倾斜修正,然后计算方向谱;而不需要修正时,不需要进行测点位置修正,可直接计算方向谱。
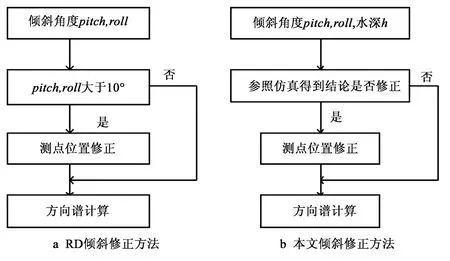
图4 ADCP倾斜条件下方向谱计算Fig.4 Wave directional spectrum estimation for tilting ADCP
3 仿真分析
仿真条件:(1)在水深15 m和25 m的情况下,选取阵列形式为JANUS配置的3层12点阵列,每层测点之间的为0.5 m;(2)假设姿态角 pitch,roll从0°~10°变化,计算不同水深下方向分布估计误差RMSE随着倾斜姿态角pitch,roll的变化,S(f,θ)和^S(f,θ)分别代表了方向谱真实值和方向谱估计值,H1/3代表有义波高。

图5选取了深度为10 m,25 m的2种情况。可以看出当ADCP深度为10 m或25 m时,ADCP倾斜姿态角pitch,roll越大,方向谱估计误差RMSE越大;在相同的姿态角pitch,roll下,ADCP安放深度25 m的方向谱估计误差RMSE要大于ADCP安放深度为10 m的方向谱估计误差RMSE,即随着深度的增大,相同的姿态角pitch,roll带来的方向谱估计误差变大。这种现象在理论上是可以解释的,假设无倾斜时的ADCP中心点处的水平面内坐标为(0,0),ADCP放置深度为h,倾斜条件下姿态传感器pitch,roll值使得中心点位置(0,0)在水平面内分别移动h×sin(pitch),h×sin(roll),此变化位移不只跟姿态角pitch,roll值有关,同样跟ADCP放置深度h有关,当ADCP深度h越大,相同姿态角pitch,roll带来的测点位置偏移越大,导致方向谱估计误差RMSE越大。
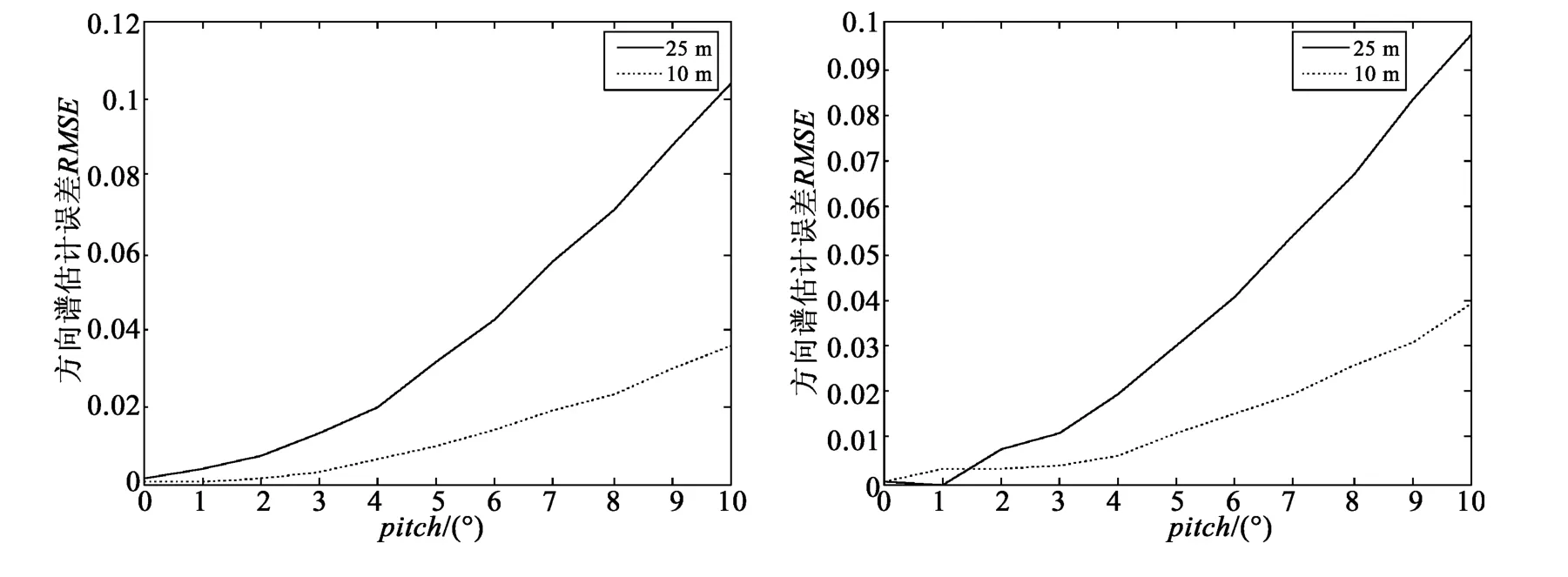
图5 方向谱估计误差RMSE随姿态角变化Fig.5 Variation of wave directional spectrum estimation error RMSE with tilting angles
图6给出了由公式(8)计算得到的有义波高变化ΔH1/3/H1/3随pitch,roll的变化关系曲线,从中可以看出:(1)有义波高变化ΔH1/3/H1/3与方向谱估计误差RMSE变化规律相似;(2)当姿态角pitch,roll等于10°时,ADCP安放深度为25 m时,对应有义波高变化ΔH1/3/H1/3分别为0.052和0.05,而当ADCP安放深度为10 m时,对应有义波高变化ΔH1/3/H1/3分别为0.18和0.18,即ADCP安放深度不同,相同的姿态角带来的有义波高变化不同。RD公司给出倾斜修正门限为10°,没有考虑到ADCP安放深度,这是不合理的。
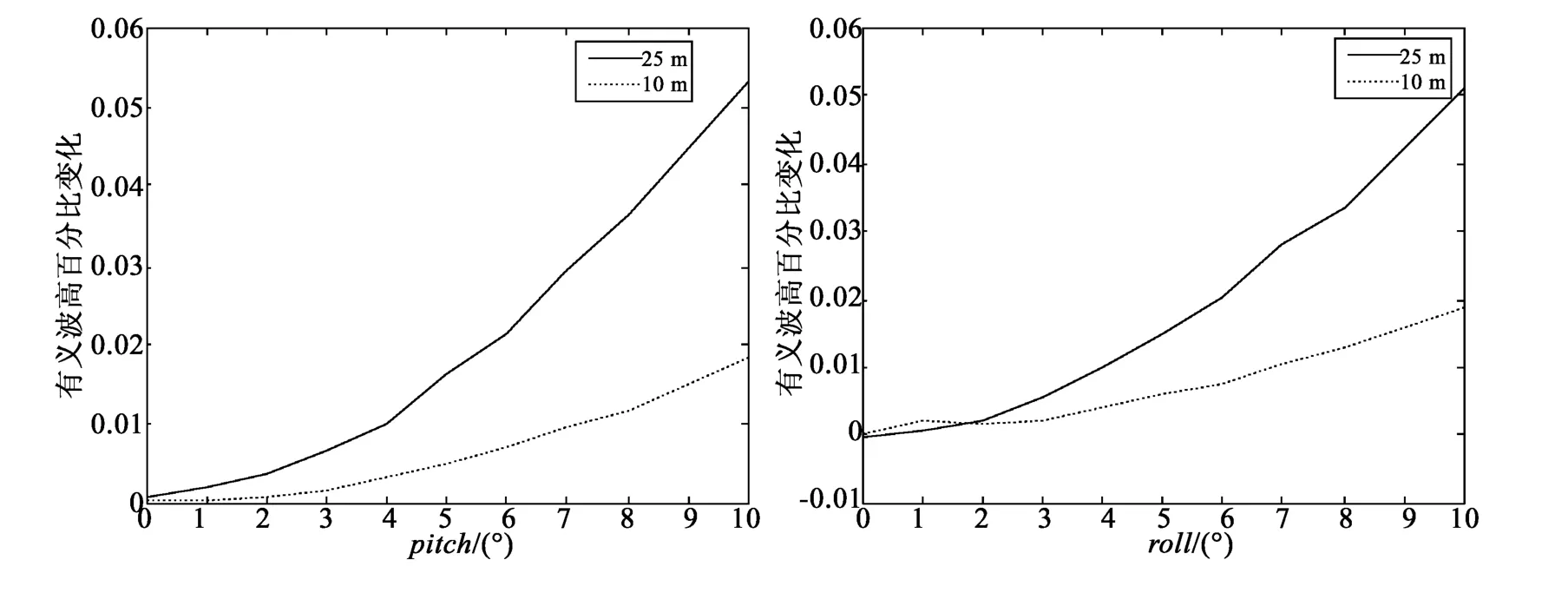
图6 有义波高百分比ΔH1/3/H1/3随倾斜角度变化Fig.6 Variation of significant wave height percentage ΔH1/3/H1/3with tilting angles
考虑实测数据的有义波高的精度一般为1%,若假定实测数据因为倾斜带来的有义波高变化ΔH1/3/H1/3为1%作为倾斜修正门限时,仿真表明当水深为25 m的情况下,姿态角pitch,roll大于4°即需要进行倾斜修正,此时RD公司的姿态角10°门限显然是不能满足要求的。
4 实测数据分析
选取RD公司ADCP的实测数据进行倾斜修正分析。数据1和2来源于北纬34.34°,西经76.42°的美国卡罗莱纳州lsrb试验点,选取的是600 kHz坐底式的ADCP,置于水下25.4 m,采样频率是2 Hz。数据3和4来源于美国加利福尼亚州,1 200 kHz坐底式的ADCP位于水下10.9 m,采样频率为2 Hz。
图7中数据1和数据2的深度为25.4 m,同仿真中25 m进行对比,可以看出实测数据1,2与仿真情况的有义波高百分比ΔH1/3/H1/3随着姿态角pitch,roll变化的曲线是吻合的。同样在图8中数据3和数据4的深度为10.9 m,与仿真中10 m进行对比分析,实测数据3和实测数据4随着姿态角pitch,roll变化曲线与仿真10 m的曲线是吻合的。实测数据1、2、3和4与仿真结论吻合,证明了仿真分析的正确性。

图7 数据1和数据2的仿真和实测对比Fig.7 Simulation and experiment comparisons between data 1 and data 2
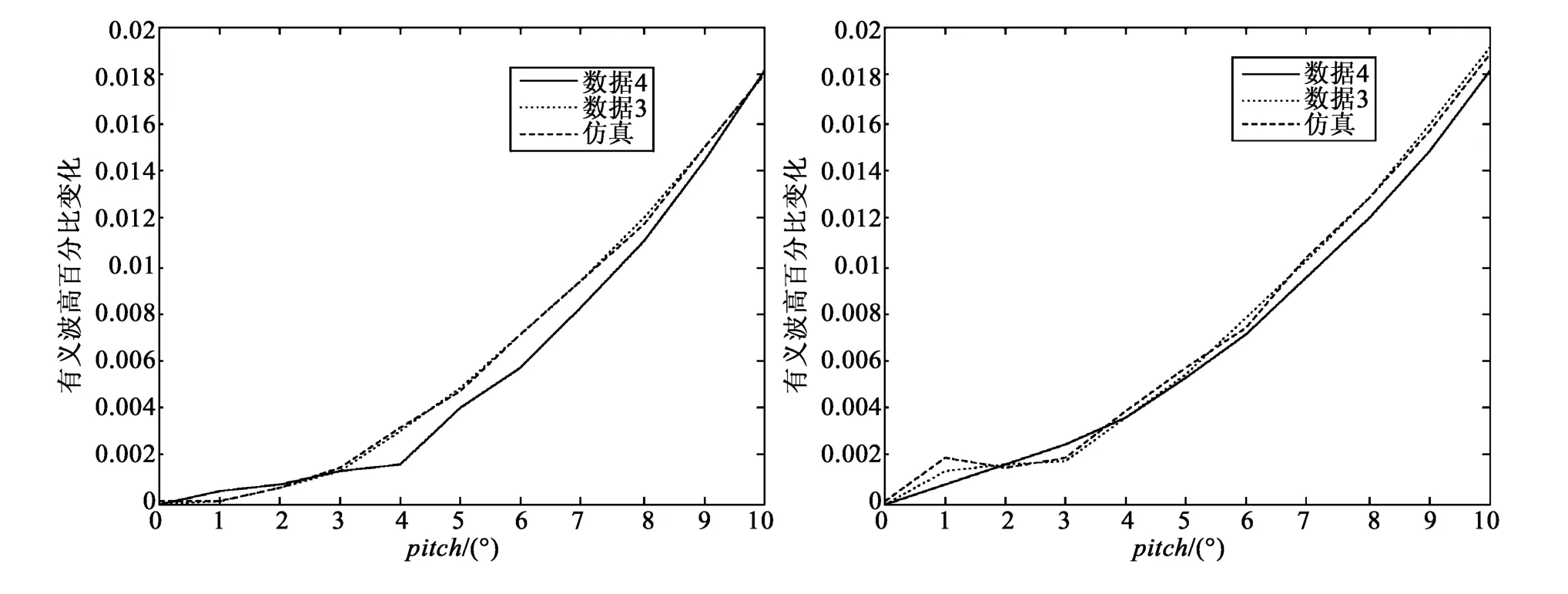
图8 数据3和数据4的仿真和实测对比Fig.8 Simulation and experiment comparisons between data 3 and data 4
5 结语
当ADCP存在倾斜时,ADCP的测点位置发生偏移,倾斜带来的方向谱估计误差影响ADCP波浪估计的准确性。本文给出了一种倾斜修正算法,通过倾斜带来的有义波高变化来判断是否进行测点倾斜修正,其中有义波高随着姿态角和ADCP安放深度的定量变化是可以预先通过仿真得到的,新算法实现简单,且提高了当ADCP倾斜时的方向谱估计精度。
[1]BRUMLEY B H,TERRAY E A,STRONG B S.System and method for measuring wave directional spectrum and wave height:US,US 6052334[P].2001 -08 -28.
[2]LONHRMANN A,PEDERSEN T K.System and method for determining directional and non-directional fluid wave and current measurements:US,US 7352651[P].2008 -10 -02.
[3]KROGSTAD H E,GORDON R L,MILLER M C.High-Resolution directional wave spectra from horizontal mounted acoustic doppler current profiler meters[J].Journal of Atmospheric and Oceanic Technology.1988,5:340 - 352.
[4]ZEDEL L.Deep ocean wave measurement using a vertically oriented sonar[J].Journal of atmpheric and oceanic technology.1994,11(1):182 -191.
[5]Teledyne RD Instruments.WaveMon v3.06 User’s Guide[Z].US:RD Instruments,2009.
[6]SMITH J A,BULLARD G T.Directional surface wave estimates from Doppler sonar data[J].Journal of atmospheric and oceanic technology,1995,12(3):617-632.
[7]VISBECK M,FISCHER J.Sea surface conditions remotely sensed by upward-looking ADCPs[J].Journal of atmpheric and oceanic technology.1995,12(1):141-149.
[8]TERRAY E A,KROGSTAD H E,CABRERA R,et al.Measuring wave direction using upward-looking Doppler sonar[C]//Proceedings of the IEEE 4th working conference on current measurement.US:IEEE,1990:252 -257.
[9]RD instruments.ADCP coordinate transformation:Formulas and calculations[Z].US:RD Instruments,2010.
[10]TREVORROW M V,BOOTH L J.Extraction of Ocean wave directional wave spectra using steerable Doppler side-scan sonar[J].Journal of atmospheric and oceanic technology,1995,10:1087 -1100.
[11]TREVORROW M V.Measurement of ocean wave directional spectra using Doppler side-scan sonar arrays[J].Journal of atmospheric and oceanic technology.1995,16:603 -616.
[12]TRUMP C L,ALLAN N.,MARMORINO G S.Side-looking ADCP and Doppler radar measurements across a coastal front[J].IEEE Journal of Oceanic Engineering,2000,25(4):423 -429.
[13]TERRAY E A,BRUMLEY B H,STRONG B.Measuring waves and currents with an upward-looking ADCP[C]//Proceedings of the IEEE Sixth Working Conference on Current Measurement.San Diego,CA,USA:IEEE ,1999:66 -71.
[14]STRONG B S.System and method for determining wave characteristics from a moving platform:US,US20100302908A1[P].2010-12-02.
[15]TRENAMAN N,DEVINE P,STRONG B.ADCP-based multi-directional wave gauge and current profilinig[C]//OCEANS '02 MTS.US:IEEE ,2002:1763-1766.
