复杂场景下基于特征点匹配的目标跟踪算法
2014-12-03仇大伟刘静
仇大伟,刘静
(山东中医药大学理工学院,山东济南250355)
目标跟踪是计算机视觉领域中的一个重要问题,在视频会议、目标监控和人机交互中有着广泛应用。目标跟踪的主要目的是在动态变化的场景下连续、可靠地获取目标的准确位置[1],多年来,研究者们对此进行了大量研究,提出了一些目标跟踪算法。概括起来,目标跟踪算法可以分为以下四种类型[2]:基于梯度的方法通过最小化代价函数定位后续帧中的目标;基于知识的方法使用形状、轮廓等先验知识跟踪目标;基于学习的方法借助模式识别算法首先学习目标模型,然后在后续帧中搜索目标;基于特征的方法使用提取的诸如亮度、颜色和边缘等特征跟踪目标。
主动轮廓模型[3]自1988年提出后,一直是图像分割领域的研究热点,但是轮廓的初始化、运算速度等问题使其很难应用于目标跟踪的研究中。基于学习的方法[2,4-6]主要使用神经网络、径向基函数网络和支持向量机等方法进行目标跟踪。该方法允许进行复杂的、非线性目标建模,且可以动态地进行模型更新。然而,基于学习的方法一般用于特定的目标跟踪,且需要离线学习大量样本,通用性较差。近年来,基于特征的目标跟踪方法引起了研究者的广泛关注。均值偏移跟踪[7](mean shift tracking,MST)及其改进算法主要利用颜色直方图表示目标,自提出以来得到了广泛应用。然而,该类算法假定目标的直方图在跟踪过程中不会发生较大改变,实际上,由于光照强度、观测角度、目标远近以及遮挡等情况的变化,目标在运动过程中常常会发生较大改变。针对不断变化的目标外形,Nejhum等[8]提出一种使用直方图跟踪目标的算法,该算法利用目标窗口中的若干小的矩形框表示目标,小矩形框的位置在算法运行过程中自适应地确定,该算法能够跟踪在运动过程中外形有较大变化的目标。然而,该算法每次都需扫描整个图像以确定目标的大体位置,表示目标的小矩形框的调整和再定位、目标模型的更新等方面也需要做出进一步的改进。
研究人员将局部不变特征应用于目标跟踪,也取得了较好的效果。Tang等[9]使用基于SIFT(scale invariant feature transform,SIFT)的属性关系图(attributed relational graph,ARG)表示目标,在几个连续的帧中总是出现的特征被认为是稳定的特征,用于构建图;反之,较少出现的特征则从图中删除。然而,在实际的视觉目标跟踪过程中,由于外观、光照等的变化,这样稳定的特征比较少。Carrera等[10]根据SURF(speeded-up robust features)算法提出了一种鲁棒的目标跟踪算法,该算法使用Harris算子检测目标区域中的兴趣点,使用SURF描述算子对兴趣点进行表示,在目标跟踪过程中,使用UKF(unscented kalman filter)预测目标中心位置。实验表明,该算法在目标旋转、尺度变化等情况下,鲁棒性较好。然而,在目标姿态、外观发生改变的情况下,该算法未能及时更新目标模型。
为减少计算量,有效应对目标跟踪过程中的遮挡、目标外观变化等情况,本文提出了一种基于SURF的目标跟踪算法。
1 SURF算法
SURF算法是Bay等[11-12]在2006年提出的一种具有尺度、旋转不变性的图像局部特征检测和描述算子。该算法不但在性能上达到或超过了目前常用的基于Harris、基于Hessian矩阵的方法和SIFT等算法,而且其执行速度更快。
1.1 兴趣点的检测
SURF算法的兴趣点检测算子基于Hessian矩阵,这样可以利用积分图像,极大地减少时间。
对于图像中的一个像素点X=(x,y),在尺度σ下该点处的Hessian矩阵定义为


文献[13-14]中已经表明高斯核在尺度空间分析中性能优良,实际应用时须将其离散化。在SURF算法中,将二阶高斯微分算子近似为如图1所示的盒形滤波。使用这些算子SURF算法不但以较低的开销在积分图像上进行计算,且计算时间独立于滤波大小。
图1中的高斯二阶微分算子可记为Dxx、Dyy和Dyy。Hessian矩阵的行列式为

Lxx、Lyy和Lxy分别为Dxx、Dyy和Dxy与输入图像在某像素点处卷积,权值w按如下方式计算

式中,|·|F为F-范数。
兴趣点从不同尺度检测,尺度空间通常表示为一个图像金字塔。由于积分图像的使用,SURF算法可以通过不断增大滤波而不是减小图像进行尺度空间分析,如图2所示,左图表示不断减少图像大小进行尺度空间分析,SURF算法使用右图所示方法,使用相同大小的输入图像,通过不断增大滤波大小进行尺度空间分析。

图1 高斯二阶微分算子Fig.1 Gaussian second-order partial derivative operator in x-,y-and xy-directions
尺度空间分成不同分组,为了使滤波大小为奇数且保证中心像素的存在,相邻滤波必须增大至少2像素。对于每一新的尺度空间分组,滤波增大加倍(从6~12到24~48)。在SURF算法中,第1分组的滤波大小分别为9、15、21、27,第2分组至第4分组中的滤波大小分别为15、27、39、51;27、51、75、99;51、99、147、195。
SURF算法运用非最大化抑制和插值方法寻找兴趣点。

图2 尺度空间分析Fig.2 Scale space analysis
1.2 兴趣点的描述

为提取兴趣点的描述,首先构造一个以兴趣点为中心,沿兴趣点方向的窗口,窗口大小为20s。该窗口被划分成4×4的小区域,在每个小区域计算Haar小波响应,水平方向记为 dx,垂直方向记为 dy(滤波大小为2s)。dx和dy与以兴趣点为中心高斯分布(σ=3.3s)进行加权。在每个小区域中计算向量v=(Σ dx,Σ dy,Σ |dx|,Σ |dy|),连接4×4个小区域的向量,就可得到一个长度为64的向量。
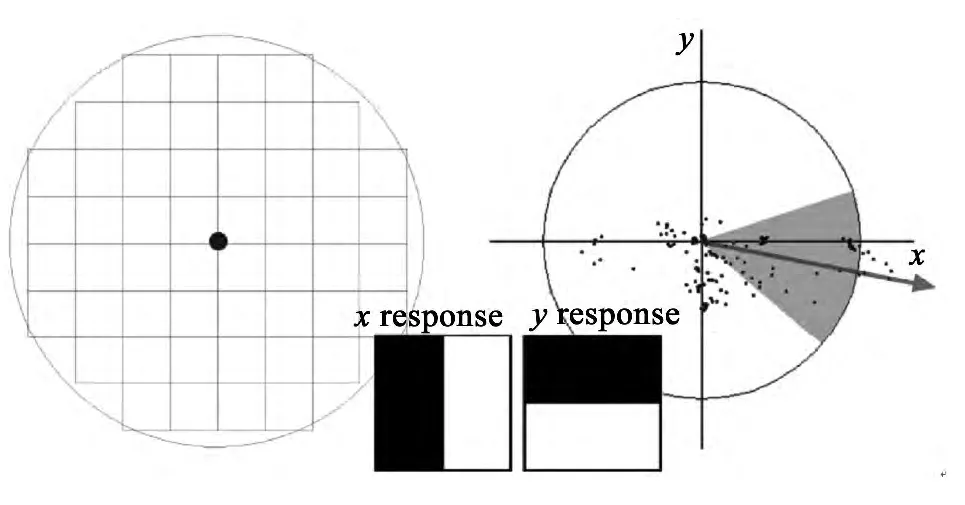
图3 兴趣点方向的指定Fig.3 Orientation assignment for the interest point
1.3 兴趣点的匹配
兴趣点的匹配基于向量间的距离,一般使用马氏(Mahalanobis)距离或欧氏(Euclidean)距离。
2 基于SURF的目标跟踪算法
在目标跟踪中,目标的表示、目标的检测、遮挡情况的处理、目标大小的缩放、目标模型的更新等是需要着重解决的几个问题,在本算法中,我们针对这几个问题提出了基于SURF的目标跟踪算法。
基于SURF的目标跟踪算法以第1帧图像中矩形框界定的目标为输入,后续帧中表示目标位置的矩形框作为输出。该算法的总体框架见图4。
算法获得输入后,对于每一帧新的图像,为减少计算量,不是在整个图像中搜索目标,而是首先根据目标的运动状态,计算目标搜索区域。算法在目标搜索区域中检测SURF点,将SURF点与目标模型中的SURF点进行比较,计算最佳匹配SURF点。然后,根据最佳匹配SURF点的个数,判定目标是否发生遮挡。若发生遮挡,则根据获得的匹配SURF点在目标模型中相对应的SURF点,计算目标中心,根据SURF点及其邻近R、G、B直方图计算目标的实际位置。若目标未发生遮挡,则根据检测到的最佳匹配SURF点,计算目标中心,根据SURF点邻近R、G、B直方图缩放跟踪窗口,计算目标的最佳大小和位置。并根据获得的目标窗口,重新计算窗口内SURF点及其邻近R、G、B直方图,对目标模型进行更新,以反映目标的最新变化。
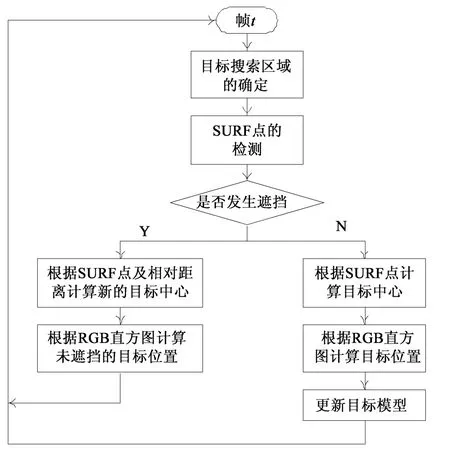
图4 算法框架图Fig.4 Flowchart of the tracking process
2.1 目标检测
目标检测是视觉跟踪的中心任务之一。本节的主要任务是计算目标的搜索区域,然后在该区域中检测目标的SURF点,这些点作为目标的主要特征点,确定了目标的大致位置,为后面计算目标的准确位置做必要的准备。
2.1.1 目标表示
本文提出的算法属于基于特征的目标跟踪算法。算法首先检测目标区域中的SURF点,然后计算每个SURF点邻近的R、G、B直方图,以SURF点和R、G、B直方图来表示目标。如图5所示,以目标跟踪窗口内的若干小矩形框的R、G、B直方图表示目标。在对跟踪的目标进行直方图的相似度比较时,不同的小矩形框赋以不同权值,离目标中心近的赋以较大权值,离目标中心较远的赋以较小权值,权值在算法运行过程中动态确定(权值的计算见2.3节)。在目标跟踪框中不可避免地会包含很多背景像素,对离目标中心较远的小矩形框直方图赋以较小权值,可以降低其对目标表示的影响,以便较准确地检测到目标,提高跟踪的精度。

图5 目标的表示Fig.5 Target representation
2.1.2 目标搜索区域的计算
为减少算法的计算成本,加快算法的执行速度,本算法不是扫描整个输入图像检测目标,而是根据上一帧图像中目标的位置和速度,在当前帧中扫描目标可能的邻近区域,进而确定目标的准确位置。目标可能邻近区域,即目标搜索区域的计算方法为:

其中,testRect和targetRect分别表示当前帧的目标搜索区域和上一帧的目标区域。其第一、第二分量表示矩形区域左上角坐标,第三、第四分量分别表示矩形区域的宽度和高度。dx和dy分别表示目标在x和y方向上的速度,此处我们假定目标沿右下角方向移动,若目标向其他方向移动,目标搜索区域可相应向该方向增长。step_w和step_h分别表示矩形区域在宽度和高度方向上需要增加的量,其计算方法如下

其中,sw和sh分别表示目标搜索区域在宽度和高度方向上的增长系数,一般选择0.1~0.3,本文中sw和sh均设置为0.2。
目标搜索区域的计算见图6,图中虚线框为上一帧图像中检测到的目标的准确位置,点线框为原目标位置进行扩展后的区域。
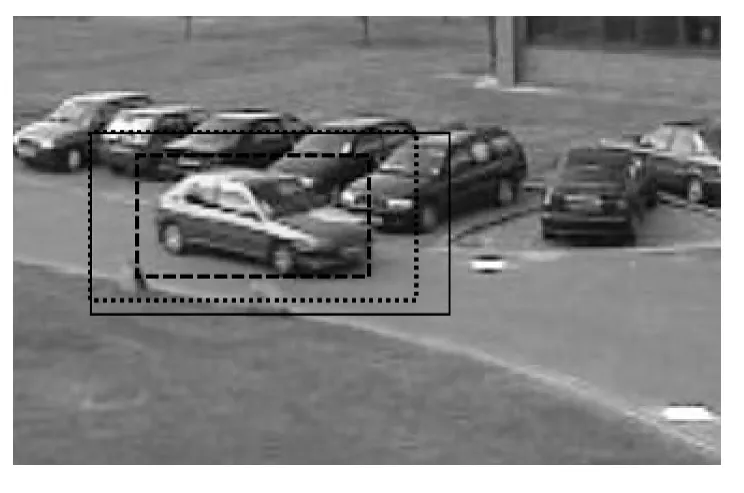
图6 目标搜索区域的计算Fig.6 Computation of target searching area
2.1.3 SURF点的检测
确定了目标搜索区域后,应用SURF算法检测该区域中的SURF点,一般来说,在目标搜索区域中检测到的SURF点将多于目标模型中SURF点的数量。为计算最佳匹配SURF点,我们首先计算目标搜索区域与目标模型中SURF点的欧氏距离

其中,TI(i)表示在目标搜索区域中检测到的第i个SURF点,TS(k)表示目标模型中的第k个SURF点。对于欧氏距离小于某一阈值θdist的SURF点,我们选定为最佳匹配点,其中θdist的值在算法运行过程中动态确定,一般为上一帧最佳SURF匹配点欧氏距离的最大值。
检测到的最佳SURF匹配点即为目标的大致位置,为计算目标的准确位置,需要计算目标的中心位置,为此算法将判断目标是否发生遮挡。
2.2 遮挡处理
为简单起见,算法根据如下原则,判断目标是否发生遮挡,并进行相应处理:
(1)若未检测到匹配点,则目标发生完全遮挡,在后续帧中,再次检测到与目标模型中相匹配的SURF点时,标志着目标再次出现。
(2)若匹配点的个数少于上一帧中最佳匹配点个数的75%,则目标发生部分遮挡。此时,目标中心根据目标模型中相应匹配点到中心的距离来计算,为方便说明,我们进行如下符号约定:目标模型中目标中心位置为O⇀
,目标模型中相应最佳SURF匹配点的位置为P⇀i,因此,目标中心到该点的距离为

如图7所示。从而,当前帧目标中心的估计值为

其中,n为检测到的最佳匹配SURF点的个数。
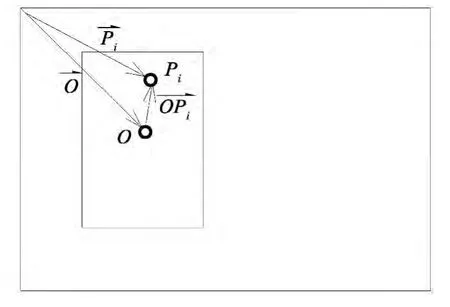
图7 目标发生遮挡时的目标中心位置计算Fig.7 Computation of the center position of a shaded target
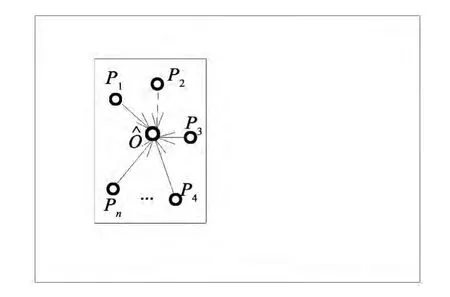
图8 目标未发生遮挡时的目标中心位置计算Fig.8 Computation of the center position without a shaded target
(3)否则,目标未发生遮挡,根据检测到的最佳SURF匹配点计算目标中心位置,见图8,目标中心的估计值为

2.3 目标缩放
检测到当前帧目标中心的估计值后,算法将根据最佳匹配SURF点邻近的颜色直方图来计算目标的准确位置。
根据上一帧中目标跟踪窗口的大小,在当前帧中,算法随机改变跟踪窗口的宽度和高度,对于每一个窗口W'=S(W,winw,winh),其中W为上一帧中目标跟踪窗口,winw和winh分别为宽度和高度方向上窗口大小改变系数,本文中我们选取0.8≤winw,winh≤1.2。算法计算在该窗口内,最近匹配SURF点邻近的R、G、B直方图,并与目标模型中相应SURF点的R、G、B直方图进行比较,返回相似度最高的窗口大小,即

式中,n为最佳匹配SURF点的个数,θ(i)为相应于第i个匹配点的目标模型中的SURF点,λi为第i个SURF点邻近直方图的权重系数,在算法运行过程中动态改变,其计算方法为


其中,b为直方图箱子索引号,Hi为目标搜索区域中第i个SURF点邻近的原始直方图。ρ(·)度量目标区域和目标模板的R、G、B直方图的接近程度,本文对R、G、B三个分量采用相同权重,即均为1/3,算法采用Bhattacharyya距离

上式中,N为直方图箱数。
因为在本文中,目标跟踪窗口和直方图的计算均是矩形框,所以可以采用积分直方图以加快算法的执行速度。
2.4 模型更新
由于姿态改变、光线变化以及场景改变等因素的影响,目标在运动过程中其特征不断发生变化,目标模型应及时反映这些变化。因此,模型更新也是影响目标跟踪效果的一个重要方面。为此,本文提出了一种在线更新目标模型的策略。
在遮挡发生前,系统保存有最近未发生遮挡的前M(本文中,我们设置M为10)帧图像中的目标特征(SURF点、邻近直方图)。若当前帧中目标未发生遮挡,则根据2.3中计算目标的准确跟踪窗口,重新计算跟踪窗口内的SURF点邻近的R、G、B直方图,将SURF点即R、G、B直方图保存到目标模型中,若目标模型中的帧数超过M,则删除最前帧中的目标特征。
若当前帧中目标发生遮挡,停止更新目标模型,根据匹配的最佳SURF点及目标模型,估计可能的目标中心位置,计算SURF点邻近R、G、B直方图,输出目标未遮挡部分。
3 实验结果与分析
为了评价所提出算法的性能,通过几个实验对其进行测试,主要针对目标缩放、遮挡情况的处理。经典均值偏移(MST)算法[7]应用较为广泛,因此本文选择该算法作为对比算法。本文将选用PETS[15-16]作为测试数据集,该数据集在目标跟踪领域作为测试数据集得到了广泛应用。
3.1 目标缩放的对比实验
本次实验使用PETS2001[15]中数据集,在该数据集的视频中,目标由远至近,跟踪目标逐渐变大,图像大小为768×576。图9为使用不同算法的部分跟踪结果,其中左侧为经典MST算法的部分跟踪结果,右侧为本文提出算法的跟踪结果。实验中本文算法选用的参数为:最优匹配SURF点个数为12,目标模型中历史帧数为10,R、G、B直方图箱数为128。图9中从上到下依次为第329、333、343、360、379帧图像。
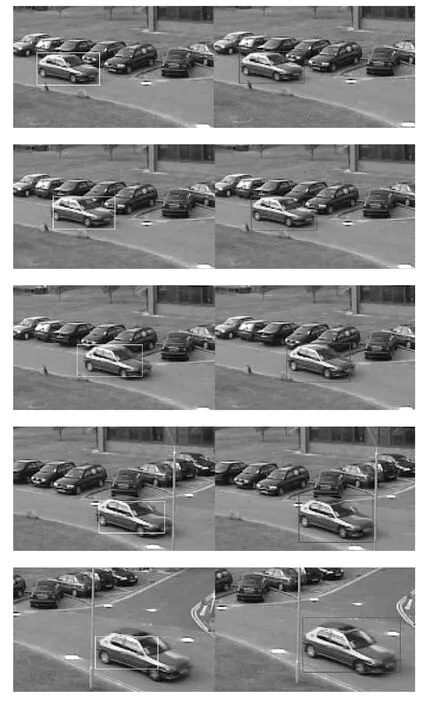
图9 目标发生缩放情况下的不同方法的跟踪结果比较Fig.9 Comparisons of tracking results of different algorithms for a zoomer target
从图9中可以看出,在目标大小发生变化的情况下,本文提出的算法可以较好地适应目标大小的变化,而经典MST算法在第360帧己不能很好地适应目标大小的变化,最终只能定位到目标的一部分。
3.2 遮挡情况的对比实验
在本节中,我们使用PETS2007[16]中的数据集,图像大小为720×576。图10为使用不同算法的部分跟踪结果,其中左侧为经典MST算法的部分跟踪结果,右侧为本文提出算法的跟踪结果。实验中本文算法选用的参数为:最优匹配SURF点个数为12,目标模型中历史帧数为10,R、G、B直方图箱数为128。图10中从上到下依次为第10、47、75、110帧图像。
从图10可以看出,从第47帧开始,经典MST算法的跟踪结果即开始偏离目标,在第75帧中,经典MST算法已经失去了目标。而本文提出的算法,即使在有遮挡的情况下,也可较好地跟踪目标,说明了本文算法的有效性。
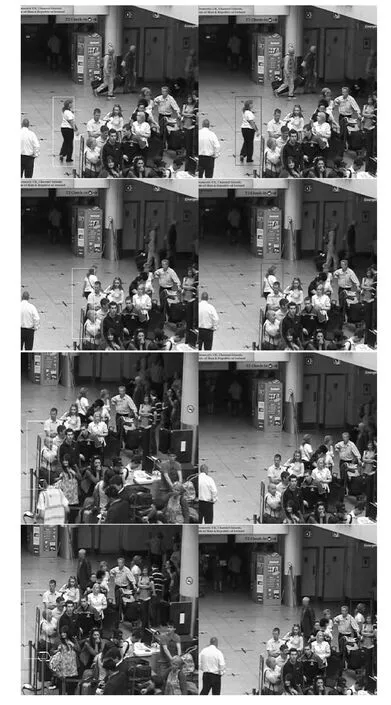
图10 目标发生遮挡情况下的不同方法的跟踪结果比较Fig.10 Comparisons of tracking results of different algorithms for a shaded target
3.3 实验分析
本节从以下三个方面说明不同参数的选择对目标跟踪结果的影响。
3.3.1 SURF特征点个数的选择
SURF特征点并不是越多越好,如图11所示,从上到下依次为SURF特征点数4、8、12、16的跟踪结果。左侧分别表示不同参数下PETS2001[15]中第349帧的跟踪结果,右侧分别表示不同参数下第379帧的跟踪结果。
文献[8]中通过实验说明了使用单一直方图进行目标跟踪时,常常得不到令人满意的跟踪效果。从图11中也可以看出,SURF特征点选取得少,算法虽然也能较准确地跟踪到目标,但是并不能准确地定位到完整的目标大小。这是因为SURF特征点较少,这些特征点只能代表目标的局部特征,其R、G、B直方图表示目标的区分性不足。反之,SURF特征点选取得越多,跟踪结果受目标周边背景特征点的影响越大;再者,SURF特征点越多,每个特征点的邻近区域越小,其R、G、B直方图在最终目标跟踪结果中所占的权重也越小。所以,应选取适当数量的SURF特征点。实验表明,目标跟踪过程中,一般选取SURF特征点的数量为目标区域中检测到的SURF特征点数量的1/3,跟踪效果较好。
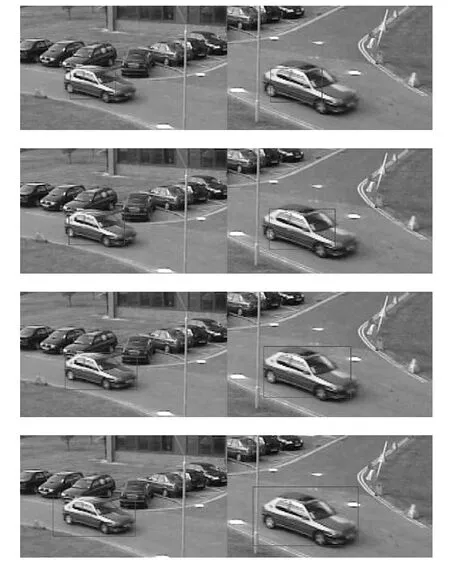
图11 不同SURF特征点个数下的跟踪结果比较Fig.11 Comparisons of tracking results corresponding to different numbers of SURF feature points
3.3.2 目标模型中历史帧数量的选择
直觉上,跟踪目标的特征在连续帧中相似度较大。因此,目标模型中历史帧数一般不会设置较大。

表1 目标在历史帧中的相似度比较Table 1 Object similarity comparison among the past frames
我们在选取的SURF特征点数分别为4、8、12、16的情况下,多次进行实验,在目标模型的最优SURF特征点匹配中,历史帧的使用情况如表1所示。从表1可以看出,当前帧中的SURF特征点主要与前3帧相匹配。所以,目标模型中历史帧数一般设置为3~5。
3.3.3 直方图中箱数量的选择
对于RGB图像来说,直方图的箱数最大为256。实验表明,箱数越大,越能较好地表示目标的特征。箱数的大小对算法的运行速度影响不显著。
4 结论
本文根据SURF相比于SIFT等特征提取方法在性能、执行速度等方面的优点,提出了一种基于SURF的目标跟踪和在线目标模型更新算法,该方法的时间复杂度较低,执行速度快,并能够在线实时更新目标模型。对于目标运动过程中突然改变运动方向,以及光照突然变化的场景下的目标跟踪算法是今后研究的方向。
[1]HU W M,TAN T N,WANG L,et al.A survey on visual surveillance of object motion and behaviors[J].IEEE Transactions on Systems,Man and Cybernetics,Part C,2004,34(3):334 -352.
[2]BABU R V,SURESH S,MAKUR A.Online adaptive radial basis function networks for robust object tracking[J].Computer Vision and Image Understanding,2010,114(3):297-310.
[3]KASS M,WITKIN A,TERZOPOULOS D.Snakes:Active contour models[J].International Journal of Computer Vision,1988,1(4):321-331.
[4]MUSAVI M,AHMED W,CHAN K H,et al.On the training of radial basis function classifiers[J].Neural Networks,1992,5(4):595-603.
[5]AVIDAN S.Support vector tracking[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2004,26(8):1064-1072.
[6]AVIDAN S.Ensemble tracking[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2007,29(2):261 -271.
[7]COMANICIU D,RAMESH V,Meer P.Kernel-based object tracking[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2003,25(5):564-577.
[8]NEJHUM S M,HO J,YANG M H.Online visual tracking with histograms and articulating blocks[J].Computer Vision and Image Understanding,2010,114(8):901-914.
[9]TANG F,TAO H.Object tracking with dynamic feature graph[C]//2nd Joint IEEE International Workshop on Visual Surveillance and Performance Evaluation of Tracking and Surveillance,2005.Piscataway:IEEE,2005:25-32.
[10]CARRERA G,SAVAGE J,MAYOL-CUEVAS W.Robust feature descriptors for efficient vision-based tracking[M]//Progress in Pattern Recognition,Image Analysis and Applications.Berlin:Springer,2007,4756:251 -260.
[11]BAY H,TUYTELAARS T,van GOOL L.Surf:Speeded up robust features[C]//Computer Vision – ECCV 2006.Berlin:Springer,2006:404 -417.
[12]BAY H,ESS A,TUYTELAARS T,et al.Speeded-up robust features(surf)[J].Computer Vision and Image Understanding,2008:110(3):346-359.
[13]KOENDERINK J J.The structure of images[J].Biological Cybernetics,1984,50(5):363 -370.
[14]LINDEBERG T.Scale-space for discrete signals[J].IEEE Trans Pattern Anal Mach Intell,1990,12(3):234 -254.
[15]PETS.Sequence 2[EB/OL].[2014-02-10].ftp://ftp.cs.rdg.ac.uk/pub/PETS2001/.
[16]PETS.Sequence 3[EB/OL].[2014-02-10].ftp://ftp.cs.rdg.ac.uk/pub/PETS2007/.
