辅助起立机器人人体运动学建模与试验研究
2014-10-25王志强姜洪源KAMNIKRoman
王志强,姜洪源,KAMNIK Roman
(1.哈尔滨工业大学机电工程学院,黑龙江哈尔滨150001;2.卢布尔雅那大学机器人实验室,卢布尔雅那1000)
起立是生活中最基本的运动之一,也是完成其他运动的准备姿势。但对老年人、功能障碍、脊髓损伤、偏瘫和全瘫等患者而言,完成站立要付出巨大努力,甚至是无法完成的任务。造成其长期保持坐姿,无法或者很少运动而导致相关生理衡并提供部分辅助力完成起立。但完全依靠上肢辅助起立,要求患者上肢健全且肌肉力较大。辅助起立时上肢将承受身体全部重量,容易受损伤,而且长时间会导致上肢各关节并发症[1-2]。起立运动不但对人体肌肉骨骼系统要求非常高,而且要求患者方向感和平衡能力较强,特别是下肢肌肉强度是完成起立关键因素。所以开发辅助患者进行起立训练、保持下肢平衡感和逐渐恢复肌肉强度的辅助器具很有意义。
目前,功能性电刺激技术可辅助患者完成起立训练,但训练过程需大量试验评估,患者对新控制方法和调整参数适应过程冗长,患者往往会由于单调的训练失去耐心,因此训练时间不宜过长。机械装置也可辅助起立,但目前所设计装置结构简单,控制系统、信号采集和反馈系统不完善。既无法反馈训练信息,也无法实时控制和监测训练过程,更无法对患者起立运动轨迹进行可编程规划[3-5],患者被固定于辅助装置而无法主动参与训练过程。综上所述,多数康复装置只能辅助患者完成站立运动和减少下肢载荷作用,但没有考虑患者站立轨迹和定量提供站立所需辅助力的功能[6-8]。本文针对目前训练方法和设备的不足,设计了可对患者进行规律训练的辅助起立机器人。通过对位置控制进行对比研究实现了对机器人的精确位置控制[9]。患者起立轨迹可编程规划和控制,逐步恢复其下肢肌肉强度,减轻专业护理人员和家人负担。
1 辅助起立机器人
1.1 辅助起立机器人设计
对患者起立过程分析可知,上肢健全患者起立时,可借助上肢维持平衡和调整方向,起立机器人只需在臀部提供部分辅助力,补偿起立过程下肢肌肉力不足,减轻上肢负担、降低了受伤风险,在起立训练时,跨骑于起立机器人的患者也可主动参与训练任务,最大发挥自身起立意志;而上肢完全受损患者,无法主动参与训练,完全依靠在起立机器人提供辅助力,帮助其完成站立。起立机器人在辅助患者起立时,末端执行器带动跨骑于自行车座患者沿参考轨迹完成起立训练。
人体在矢状平面内起立过程为3个自由度,即身体水平和竖直运动以及绕前后轴旋转运动[6]。因此,所设计辅助起立机器人也为3个自由度,2个运动关节组成。即滑动关节和旋转关节,末端执行器在液压缸牵引下沿轨道做滑动,而轨道在液压缸驱动下做旋转运动,同时为使患者起立训练舒适与安全,需保证跨骑于自行车座的患者髋关节始终处于水平位置,否则随着辅助起立机器人的旋转,车座将发生倾斜而导致事故。设计了由主动缸和从动缸组成的联动液压缸机构,确保车座始终处于水平位置。
辅助起立机器人由电液压伺服系统驱动,所供液压油压力差和流向由伺服液压阀(Moog Inc.,New York,USA)控制。液压泵提供的最大压力为5 MPa,流量为1 L/s,起立机器人末端执行器最大运动速度为2 m/s。
1.2 辅助起立机器人控制
辅助起立机器人控制系统硬件主要包括笔记本宿主机(Host PC)、台式目标机(xPC)、控制箱、传感器、伺服阀和液压泵等。实现控制的方法为xPC Target,它是一种可实现对复杂实时嵌入系统快速控制的方法。目标机与宿主机为2台独立电脑,在宿主机上使用Matlab软件,在Simulink/Stateflow模块下建立控制模型,使用C/C++编执行码。所建模型和执行代码从宿主机传输到目标机,操作系统为RTLinux实时系统。目标机与宿主机连接和交换数据的方式为网络连接,在局域网中以太网按TCP/IP协议进行数据传输,数据传输速度为100 Mbit/s。模拟信号和编码器信号通过2块PCI接口板采集,而总线与系统主CPU交换数据。控制信号通过I/O模块、D/A和A/D模块、编码器/解码器模块进行数据交换。由电压信号控制液压伺服阀开启和关闭程度,控制所供液压油量,液压缸驱动末端执行器以不同速度运动,从而实现起立机器人运动。安装于运动关节的增量式编码器把所测数据返回编码器/解码器模块,目标机将显示测试数据。辅助起立机器人控制系统如图1所示。
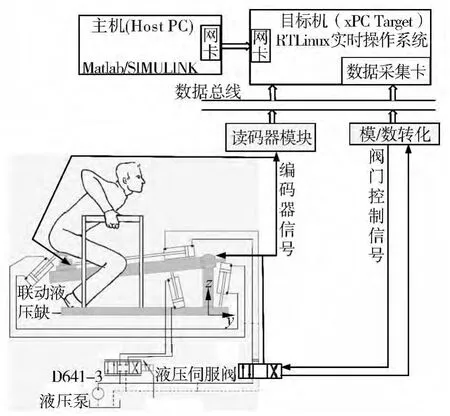
图1 辅助起立机器人控制系统图Fig.1 Control system of assistive standing-up robot
1.3 辅助起立动力学建模
为研究患者起立过程中运动学特性,建立起立过程运动学方程,作如下假设:
1)人体由3个部分组成,即小腿、大腿和上身(躯干、上肢和头部);
2)各部分都是刚体且质量位于质心;
3)各关节连接处为理想旋转副且无摩擦;
4)起立运动在矢状面内进行;
5)人体关于矢状面对称。
图2为矢状面内人体起立过程示意图。如图2所示,在矢状面内对人体起立过程建模,可得其总体动能为
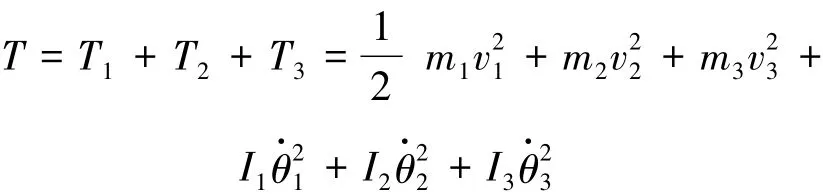
起立模型总体势能为

系统的拉格朗日函数为
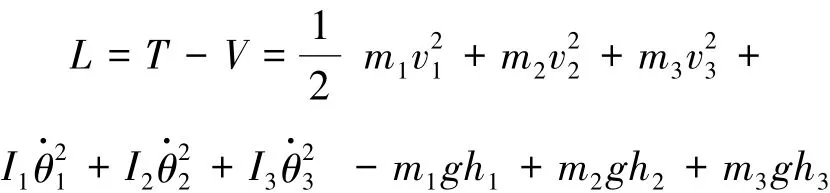
式中:mi表示身体各部分质量,vi表示各部分质心速度,g为重力加速度,hi为身体各部分长度。
人体起立过程的哈密尔顿原理为
固定边界条件为初始起立时间t=t1和最终站立时间t=t2,δθ=0;θ为广义坐标;为广义速度。人体起立运动学方程可表示为
式中:θi表示各关节铰接点与水平线夹角。
方程得出起立各关节角度、角速度和角加速度与人体参数之间函数关系。
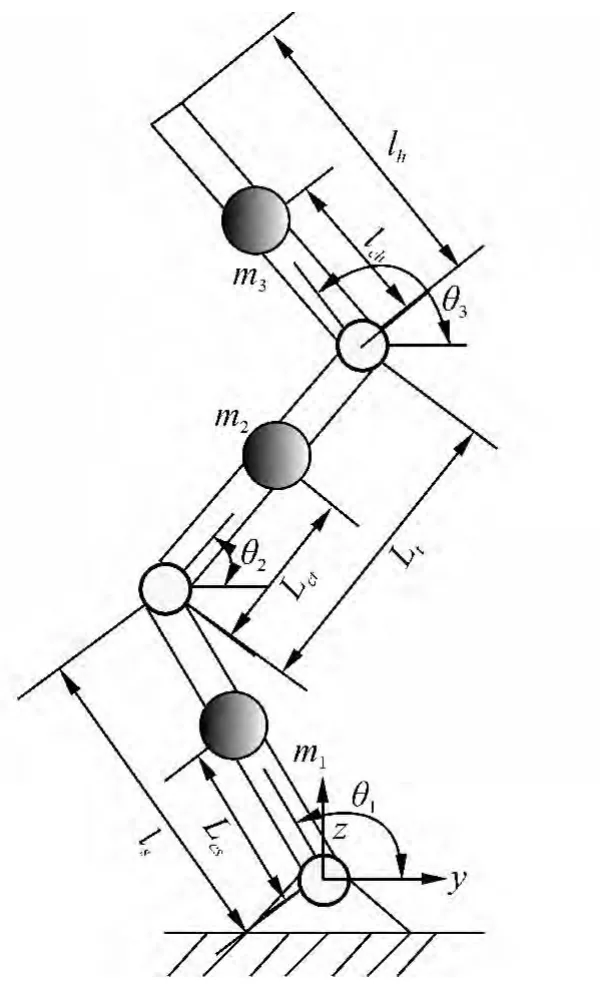
图2 矢状面内人体起立过程示意图Fig.2 Schematic diagram of standing-up for human in sagittal p lane
2 机器人辅助患者起立模拟及试验
2.1 起立关节角模拟与测试
为验证汉密尔顿原理所推导人体起立过程的运动学数学模型,根据式(5)~(7)在Matlab/Simulink环境中建立模型并模拟,所得模拟结果如3图。采用三维运动系统对起过程进行试验测试,分别在患者踝关节、膝关节与髋关节处粘贴红外线标定点。分别对踝关节、膝关节和髋关节在起立过程中的关节角进行测试,结果如图3所示。
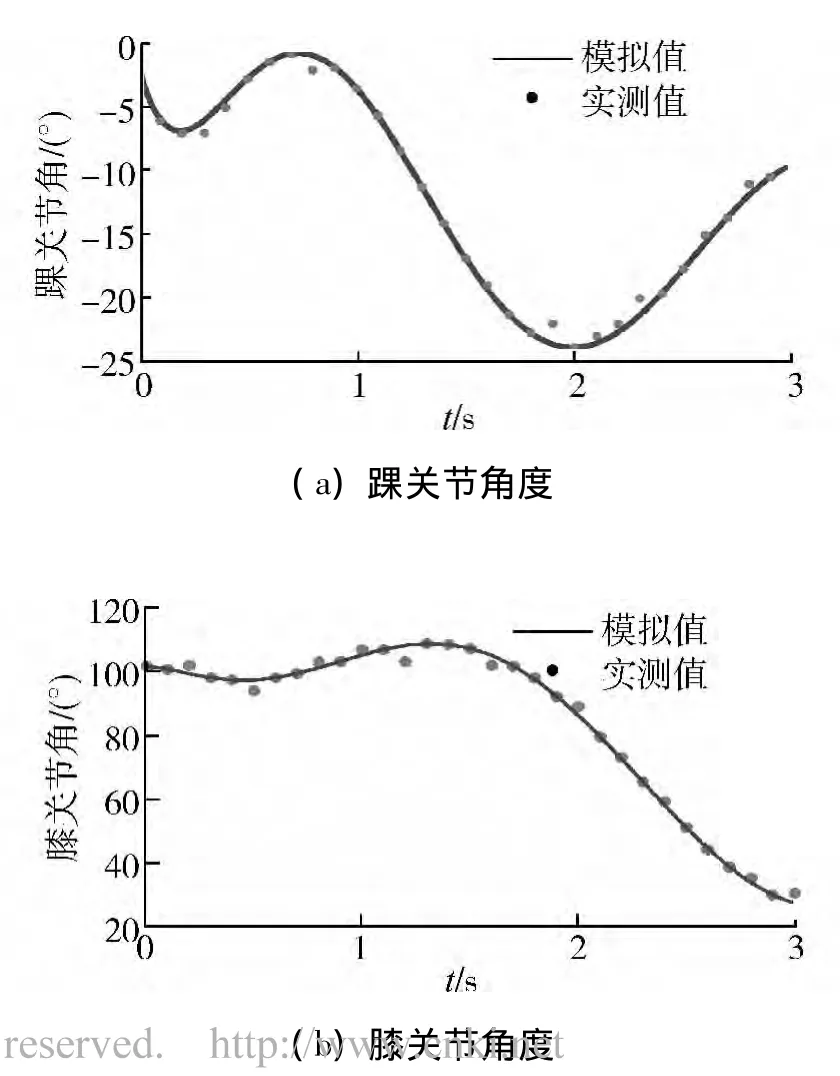
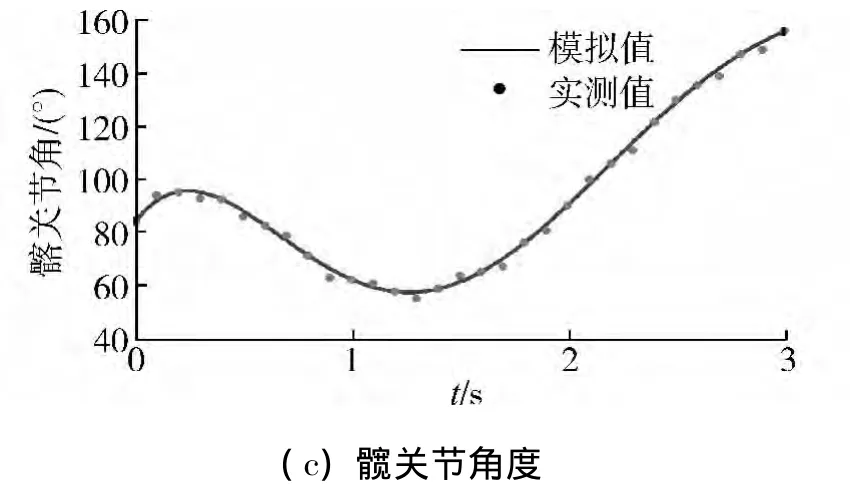
图3 起立关节角模拟与测试值对比Fig.3 Comparison of simulated and tested joint angles
由图3可知,模拟值与实测值较好重合,起始起立阶段和最终站立阶段与中阶段相比重合度较低,分析原因是由于起始和最终站立过程加速度变化较大造成,而中间段起立速度平稳,重合度较高。
2.2 各关节起立轨迹测试
下肢各关节运动轨迹是起立机器人按规划轨迹辅助患者起立,实现其精确位置控制的基础。对机器人辅助患者起立时,下肢各关节在矢状面内运动轨迹进行测试,结果如图4所示。
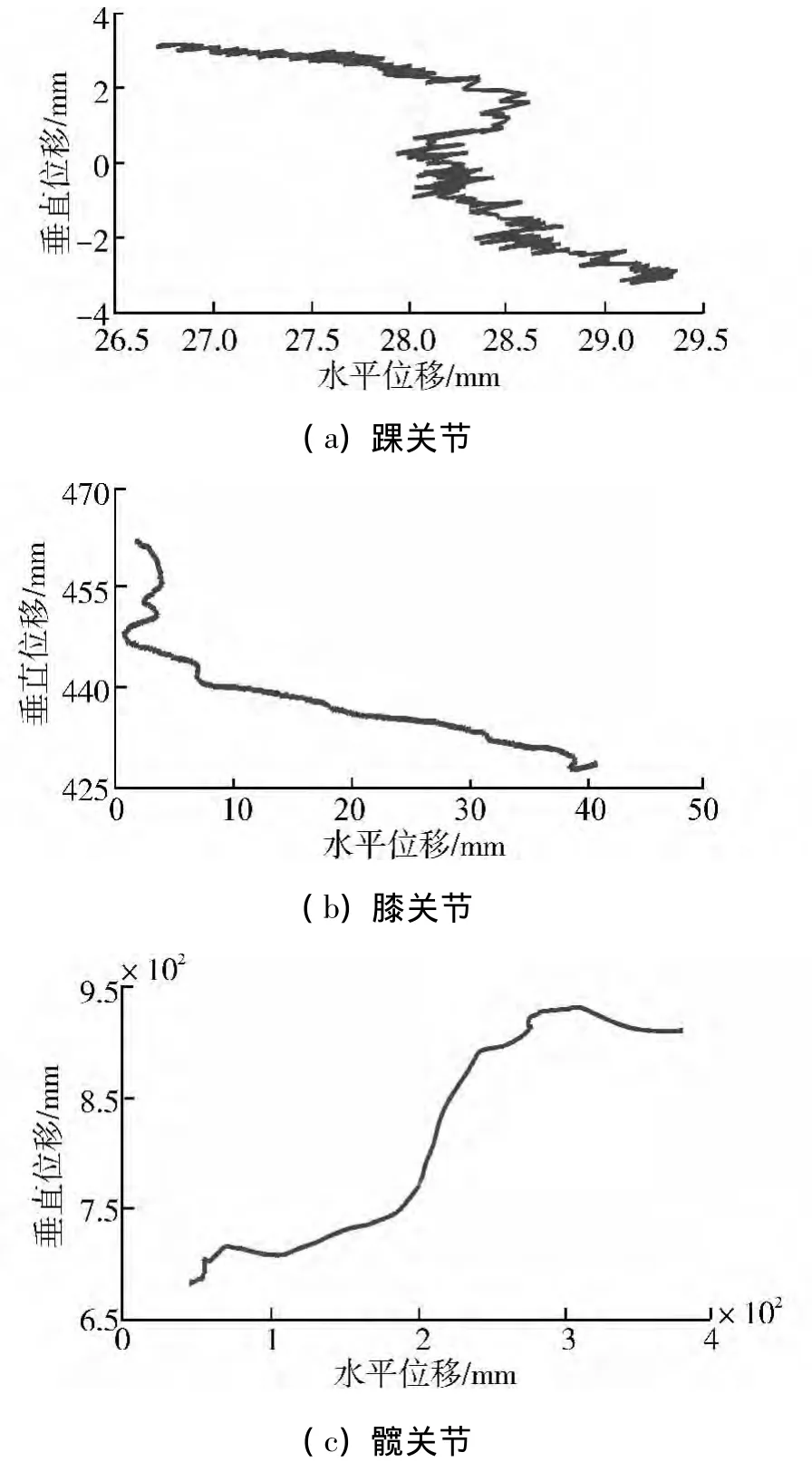
图4 下肢各关节起立轨迹Fig.4 Trajectory of joints of lower extrem ity
由图4(a)可知,患者在起立过程中,踝关节位置变化很小,水平方向位移在2 mm左右,竖直方向位移5 mm左右,可近似为固定关节。由图4(b)可知,起立过程中膝关节水平位置变化范围约为43 mm,竖直方向位置变化范围约为18 mm,且水平方向大于竖直方向位置变化。由图4(c)可知,髋关节在起立过程中位置变化最大,水平位置变化范围约为300 mm,竖直位置变化范围约为200 mm。但各关节在矢状面内起立轨迹都为不规则曲线。踝关节位置变化较小,分析原因是起立过程中下肢轻微颤动所造成,膝关节位置变换范围介于髋关节和踝关节之间。
2.3 起立过程角速度和加速度分析
对于患者而言,下肢各运动关节和上身在起立过程承担着重要作用,因此对起立过程各运动部分质心的运动学参数进行测试与分析。
对人体起立过程中下肢运动学参数进行测量,得到小腿、大腿和躯干质心角速度和角加速度。图5所示为起立过程中各运动部分质心角速度和角加速度。由图5(a)可知,小腿质心最大角速度为1 rad/s,最大角加速度为4 rad/s2。由图5(b)可知,大腿质心最大角速度为1.48 rad/s,最大角加速度为2.9 rad/s2。由图5(c)可知,躯干部分质心最大角速度为1.7 rad/s,最大角加速度为3.3 rad/s2。髋关节在起立过程中角速度最大,而小腿质心的角加速度最大。
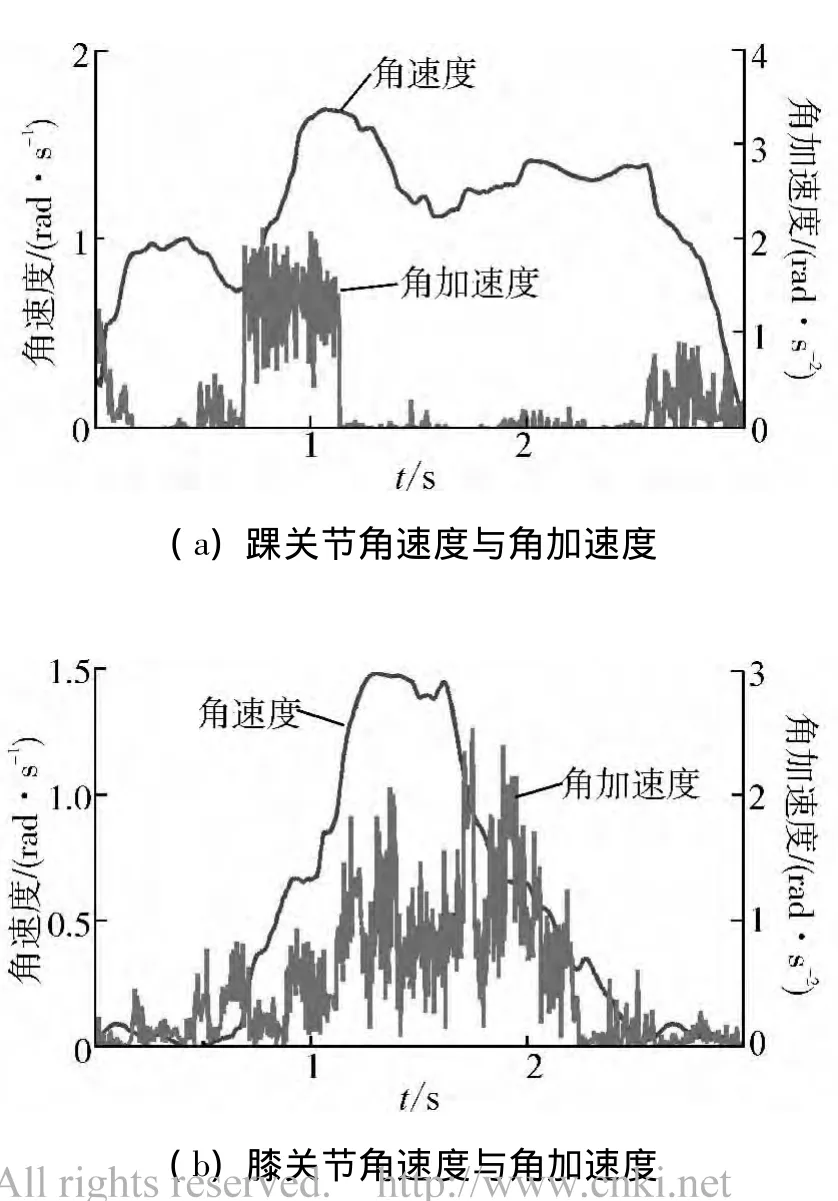
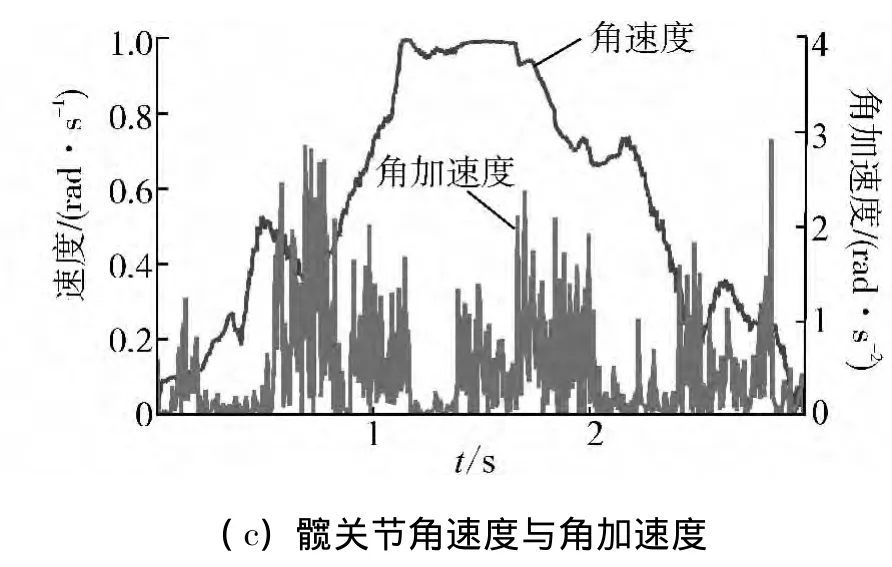
图5 下肢各关节质心角速度和角加速度Fig.5 Angular velocity and acceleration of joints of lower extremity
3 结论
以所设计的辅助起立机器人为测试平台对人体站立过程中的运动学参数进行了模拟与测试研究,得到以下结论:
1)依据拉格朗日函数与汉密尔顿原理所建立的数学模型,可有效预测机器人辅助起立过程人体下肢关节角。
2)辅助站立过程中髋关节的水平与竖直方向的位置变化最大,而踝关节最小,踝关节在站立过程中可近似为固定点,所测髋关节处的运动轨迹为辅助起立机器人位置控制奠定了基础。
3)对辅助起立过程人体各主要部位角速度与角加速度进行了测试,小腿质心处的角加速度值最大,而躯干质心的角速度值最大。
[1]KIM K,PIAO Y,KIM N.Characteristic analysis of the isokinetic strength in lower limbs of the elderly on training for postural control[J].International Journal of Precision Engineering and Manufacturing,2010,11(6):955-967.
[2]EMERY C A,CASSIDY JD,KLASSEN T P,et al.Development of a clinical static and dynamic standing balance measurement tool appropriate for use in adolescents[J].Phys Ther,2005,85(6):502-514.
[3]KIM C M,ENG J J,MACINTYRE D L,et al.Effects of isokinetic strength training on walking in persons with stroke:a double-blind controlled pilot study[J].Journal of Stroke and Cerebrovascular Diseases,2001,10(6):265-273.
[4]DVIR Z.Isokineticmuscle testing:reflections on future venues[J].Hong Kong Physiotherapy Journal,2000,18(2):41-45.
[5]KIKUCHIT,ODA K,OHYAMA Y,et al.Development of isokinetic exercise system using high performance MR fluid brake[C]//Proceedings of the 2009 IEEE International Conference on Mechatronics.Malaga,Spain,2009.
[6]姜洪源,马长波,敖宏瑞,等.基于电机辅助功能性电刺激脚踏车系统的建模[J].哈尔滨工程大学学报,2011,32(2):216-222.JIANG Hongyuan,MA Changbo,AO Hongrui,et al.Modeling of amotor-based functional electrical stimulation cycling system[J].Journal of Harbin Engineering University,2011,32(2):216-222.
[7]刘攀,张立勋,王克义,等.绳索牵引康复机器人的动力学建模与控制[J].哈尔滨工程大学学报,2009,30(7):811-815.LIU Pan,ZHANG Lixun,WANG Keyi,et al.Dynamic modeling and control of awire-driven rehabilitation robot[J].Journal of Harbin Engineering University,2009,30(7):811-815.
[8]侯春林,钟贵彬,范肇鹏.脊髓损伤患者的康复治疗策略[J].中国康复理论与实践,2007,13(3):225-226.
[9]王志强,姜洪源,KAMNIK Roman.辅助起立机器人反馈控制与速度前馈控制性能对比[J].机器人,2012,34(6):201-203.WANG Zhiqiang,JIANG Hongyuan,KAMNIK Roman.Performance comparison on assistive standing-up robot with feedback and velocity feed-forward control[J].Robot,2012,34(6):201-203.
[10]KAMNIK R,BAJD T.Human voluntary activity integration in the control of a standing-up rehabilitation robot:a simulation study[J].Medical Engineering and Physics,2007,29:1019-1029.