前视声呐多特征自适应融合跟踪方法
2014-10-25马珊庞永杰张铁栋张英浩
马珊,庞永杰,张铁栋,张英浩
(哈尔滨工程大学水下机器人技术重点实验室,黑龙江哈尔滨150001)
基于多特征的似然模型的构建是水下多目标跟踪中的一个重要研究内容。由文献[1]可知,在序列前视声呐图像目标跟踪中,双特征匹配的跟踪效果优于单特征匹配,跟踪轨迹更为连贯,且精度较高;文献[2]提出了乘性融合的策略用于目标跟踪,在噪声较小时效果较好;文献[3]中采用特征加权和融合的方式构建特征似然模型,且权值基于Sigmond函数及Bhattacharyya相关系数进行调整,实现了室外骑车男子跟踪。
本文采用粒子滤波,粒子权值采用多特征自适应线索融合策略得到。通过判断当前粒子各特征线索是否良好,采用不同的特征融合策略,以适应不同的跟踪情况。
1 粒子滤波算法
1.1 粒子滤波算法概述
粒子滤波是贝叶斯估计方法的蒙特卡罗近似[4]。其基本思想为:采用带有归一化权值的随机粒子集对概率密度p(x|z)进行近似
kk表示,以样本均值代替积分,获得其最小方差估计。即对平稳随机过程,假定k-1时刻系统的后验概率密度为p(xk-1|zk-1),在一定范围内随机选取n个粒子,k时刻得到新的量测,经过状态和时间更新过程,n个粒子的后验概率密度可近似为p(xk|zk)。当粒子数目足够大时,可以足够接近后验概率密度,粒子滤波估计接近最优贝叶斯估计。
1.2 粒子滤波算法基本原理
1.2.1 顺序重要性采样
假定k-1时刻系统的后验概率密度为p(xk-1|zk-1),在一定范围内选取N个随机粒子。采用重要性采样原理计算权值,假定p(x)∝π(x)。令xi→ q(x),i=1,2,…,Ns。其中,q(·)是重要性密度函数,则p(x)可表示为

经过一系列公式分解及变换可得权值更新公式:

可估算后验概率密度p(xk|z1:k):

1.2.2 重要性采样重采样
对于重要性密度函数q(xk|z1:k),其权值的协方差会逐渐增大,对精度产生巨大的损害,被称为粒子退化。即几次迭代后,除少数粒子有较大权值外,其余大部分权值的粒子都很小。有效采样尺度可以用来判断粒子退化程度:


Neff很小说明退化很严重。通过增加粒子数目N可以减小退化这一不利影响,但会增加计算量。通常采用选择重要性函数或重采样来降低退化现象的影响。
本文采用随机采样方法进行重采样[5]。首先产生n个在[0,1]上均匀分布的随机数{μl:l=1,2,…,n},然后通过搜索算法找到满足以下条件的整数m,使得:
记录样本x(m)k,并将其作为新样本集中的采样,将区间[0,1]按 λ =(i=1,2,...,n)分成n个小区间,当随机数 μl落在第 m个区间 Im=[λn-1,λ]时,对应样本x(m)k进行复制。则采样总数保持不变,多次复制大权值粒子,完成重采样。
2 信息融合策略
2.1 乘性融合
采用乘性融合进行多特征融合时,需首先假设各特征间相互独立。n个特征乘性融合的似然模型为

其中,yi为第i个特征线索的量测。各个特征线索间相互独立。乘性融合可以降低粒子协方差,提高确定性,增大置信度,即采用乘性融合策略在周围环境简单时可以提高跟踪精度。但是若存在着噪声污染或与其他目标较接近,乘性融合也将会增大噪声,不利于目标跟踪。
乘性融合较为简单,应用广泛。但在多目标跟踪中,无法保证各特征间绝对独立,且多目标跟踪容易出现靠近或遮挡的问题,这时乘性融合的稳定性就会变差,从而导致跟踪出错。
2.2 加权和融合
加权和融合对于复杂环境下的特征融合问题,具有一定的稳定性。其融合公式为

式中:αi为p(yi|x)的加权系数,且
由于序列图像来源一致,因此可以采用不同的特征建立不同的似然模型,然后通过加权和融合的方式将各个似然模型加权求和。加权和融合即将各个特征组合起来,其对噪声的敏感度比乘性融合低,跟踪稳定性高。在环境较为复杂或两目标相接近、遮挡时,采用多特征加权和融合方式跟踪,有利于提高跟踪的稳定性。
3 基于自适应融合策略的声图像多特征粒子滤波跟踪方法
3.1 目标运动模型
由于水下目标运动速度较小,且本文所采用的粒子跟踪对运动模型依赖性不高,因此采用常速度模型作为运动模型。目标状态包括:水平方向位移x、垂直方向的位移y。采用X和Y分别表示目标中心的水平及垂直坐标。
初始化数学模型为

在一定范围内随机采样得到各粒子初始位置,且x方向噪声和y方向噪声相互独立。b1、b2为常数,表示粒子的传播半径。w为[-1,1]内的随机数。
状态转移模型为

3.2 多特征线索
对前视声呐图像进行预处理并从中提取出目标的30个特征,包括形状与亮度特征、形状矩特征、不变矩数字特征、灰度共生矩阵数字特征;利用前向序列选择(SFS)及后向序列选择方法(SBS)得到最优特征序列,采用GRNN[6]来检验各个特征组合的效果;对比分析声呐图像特征的SFS及SBS实验结果,采用SFS方法选择出的前7组特征用于目标跟踪。选出的特征如下。
3.2.1 形状与亮度特征
目标的形状亮度特征由于运算复杂度低而适合实时性较高的场合。目标外界矩形M×N,目标面积P×Q。本文采用特征如下:
1)目标的平均亮度I0,表示为
2)背景的平均亮度B0,表示为

式中:f(i,j)为目标灰度值,f'(i,j)为背景灰度值。
3.2.2 不变矩特征
不变矩[7]是利用二阶和三阶中心矩ηij构造出的,满足平移、缩放和旋转不变的条件。本文采用特征如下:
1)第4种不变矩,表示为

2)第5种不变矩,表示为

3)第6种不变矩,表示为

4)第7种不变矩,表示为

不变矩数值变化幅度较大,无法直接应用,本文取其对数作为特征:

3.2.3 灰度共生矩阵特征
灰度共生矩阵[8]反映了图像灰度关于方向、相邻间隔、变化幅度的综合信息,h(i,j)表示矩阵的第(i,j)个元素。本文采用差熵特征,表示为
不同采收期承德产黄芩比较,以年限为主因素,月份为副因素时,黄芩中黄芩苷、汉黄芩苷、黄芩素、汉黄芩素、千层纸素A成分含量在5~7月间最高,2年生与3年生黄芩从成分变化相近,且3年生黄芩成分含量并未较2年生出现明显提高[42]。而陕西商洛产黄芩中黄芩苷、汉黄芩苷、黄芩素成分含量于黄芩生长第2年10月下旬达到最高[43],基于2015版《中华人民共和国药典》载[19],黄芩与春、秋2季采挖,故应选择黄芩生长第2年进行采收,季节视当地气候条件与黄芩有效成分积累而定。
将各个粒子对应区域内目标的各特征值求出后,就可以计算相应粒子的权值。
利用高斯模型构建似然函数为

式中:σ为似然函数噪声值,σ变小时,似然模型的判断正确性增加;d(p^,q^)为目标与各个特征间的距离;β为距离调控因子。
3.3 多特征线索融合及其实现
乘性融合策略在外界干扰弱时,跟踪精度较高,但稳定性较低;加权和融合在外界干扰较强或两目标相近时,稳定性较高。所以本文采用自适应融合方式进行特征融合,根据外界环境变化,在线调整融合策略。当干扰较少,2目标距离较远时,各特征匹配效果较好,应采用乘性融合;当外界干扰较大或2目标接近甚至遮挡时,各特征匹配效果降低,应采用加权和融合。
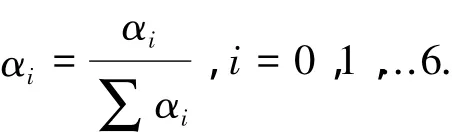
各特征匹配效果的判断方法[9]为:判断各特征的可信度是否小于给定阈值。在粒子滤波跟踪中,容易得到粒子的协方差,可计算各特征粒子协方差的弗罗伯尼范数,并将可信度取为范数的倒数。若特征可信度大于给定的特征阈值,则此特征退化。
采用加权和算法时,为避免加权和融合仅对各线索按一定系数线性加权,采用基于模糊逻辑的加权融合方式。各特征权值由模糊推理调节,模糊逻辑的输入为当前帧各特征的可信度,取为各特征协方差阵的弗罗伯尼范数Fi的倒数,模糊输出为各特征线索的权值αi。
作为一个多输入多输出的模糊控制器,控制规则复杂,计算量庞大。为降低计算量,减少控制规则,本文对此控制器进行简化。由于每个特征线索的权值取决于此特征的可信度和其余特征可信度的相对大小,因此本文分别将每个特征的可信度与其余所有特征可信度的均值作为模糊输入,来确定此特征权值,所以此多输入多输出控制器可简化为七个二维模糊控制器。
以特征i为例,计算其余6个特征线索的可信度均值,记为

在模糊控制器的设计过程中,对输入变量1/Fi和进行模糊化,将其转换到模糊控制器的内部论域[-1,1]上,分别定义 5个模糊集合{NB,NS,ZE,PS,PB},αi的论域取为[0,1],隶属度函数采用对称、均匀分布、全交叠的三角形函数。最后采用加权平均法进行去模糊化。
模糊规则表的选取如表1所示,可以看出随着线索i的可信度1/Fi的增大和其余特征线索可信度均值的减小,输出的线索权值越大,反之越小。从而增大可靠特征的权值,减小不可靠特征的权值。

表1 模糊规则表Table 1 Fuzzy ru le list
线索融合的具体跟踪方法如下:
2)k=2,3,...Nf;
③判断粒子各特征可信度是否小于给定阈值,否则认为此特征退化.若任一特征线索退化:通过模糊推理得到,并归一化;否则:并归一化;
3.4 基于自适应融合的声图像跟踪方法实现步骤
基于自适应融合策略的声图像多特征粒子滤波跟踪方法的实现流程如图1所示。
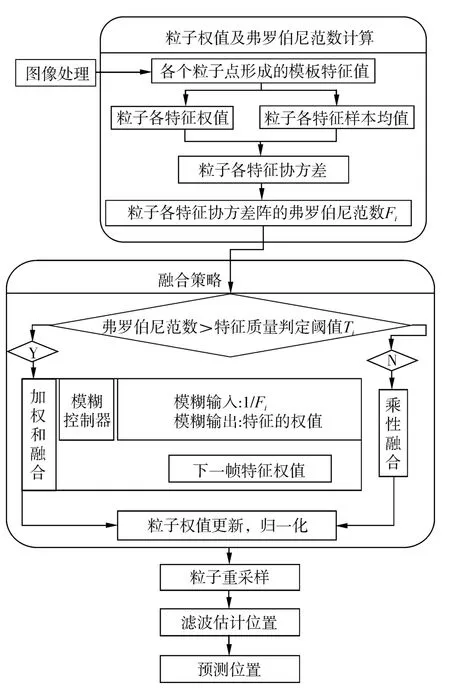
图1 基于自适应融合策略多特征粒子滤波跟踪流程图Fig.1 Flow chart of particle filter tracking based on adaptivemulti-features fusion
4 实验结果
为检验多特征自适应融合的可行性和有效性,在实验室水池开展了系列试验。该水池具体参数为50 m×30 m×10 m。选用Tritech公司的前视声呐Super SeaKing DST,将其安装在距水面2 m位置,此声呐探测距离为0.4~300m,试验中选定量程10m,声呐距离分辨率10 cm,角度分辨率3°,水平波宽为3°,垂直波宽为20°。被跟踪目标布放在水下3 m处,通过拖动绳索使其在水池中运动,试验环境及目标如图2所示。
图2 试验环境及目标Fig.2 Test environment and targets
本文选用2组前视声呐序列图像验证自适应特征融合的跟踪效果,并进行了与乘性融合及加权和融合的对比试验。
4.1 2目标平行运动跟踪实验
2目标平行运动序列图像中,选定左部运动物体为目标1,右部运动物体为目标2,2目标分别从下向上平行运动。目标多特征融合跟踪轨迹如图3所示。
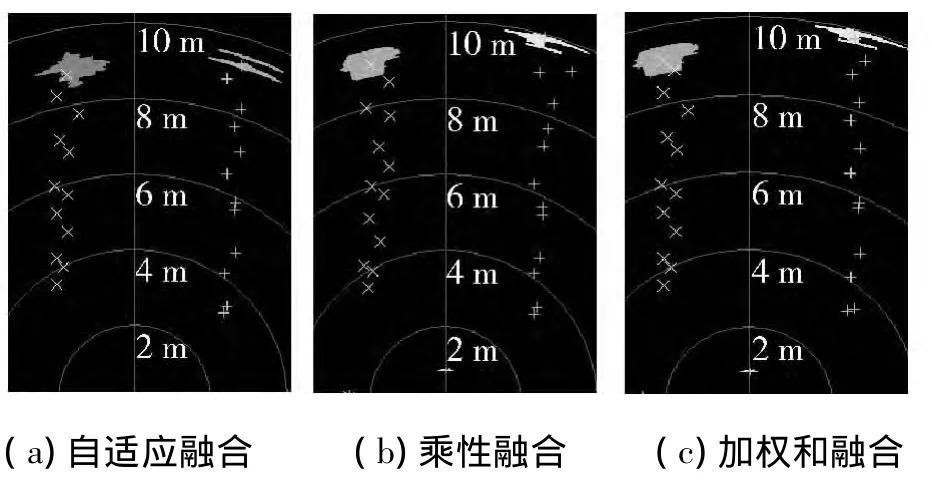
图3 融合跟踪轨迹Fig.3 Tracking traces by fusion methods
2平行运动不同融合策略下目标轨迹分布图如图4所示。3种融合策略的各方向位置误差均方差如表2所示。

图4 不同融合策略下目标轨迹分布Fig.4 Targets traces distribution by different method
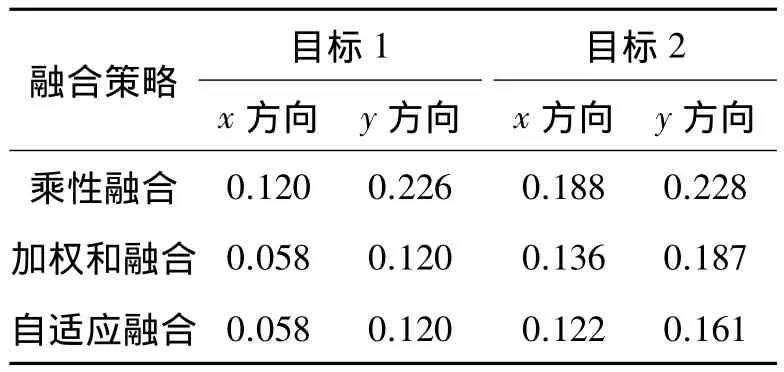
表2 3种融合策略的位置误差均方根Table 2 Position error root-mean-square by threemethod
由图4中可以看出,对于目标1其自适应融合运动预测曲线与加权和融合曲线重合,即自适应融合全程都有不稳定的特征存在,可能的原因是由于图4中目标1的运动左右摆动明显,导致预测位置与实际位置相对于上一帧目标位置的方向相反,从而使运动不稳定。对于目标2,前几帧由于运动稳定,自适应融合采用乘性融合方式,随后随着运动方向的波动,切换为加权和融合方式。
由表2可知,自适应融合策略的位置误差均方根均小于等于采用乘性融合及加权和融合策略的运动位置误差均方根,说明了自适应融合策略效果较好。
4.2 2目标交叉运动跟踪实验
在此序列图像中,2目标交叉运动。2个目标分别从左右两侧开始相对运动,交叉后分开并仍旧沿着原来的运动方向运动。本文以2个运动物体为目标,初始位置在左方的为目标1,右方的为目标2。分别采用加权和融合策略,乘性融合策略以及自适应多目标融合策略对2交叉运动的目标进行跟踪。采用不同融合策略的跟踪图如图5所示,2目标在不同策略下轨迹分布图如图6~7所示。
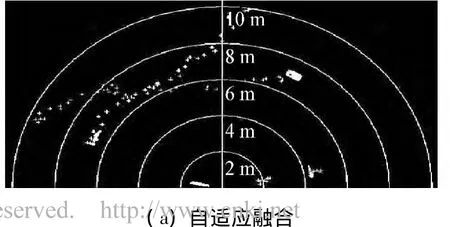

图5 不同融合策略的跟踪轨迹Fig.5 Tracking trajectory by differentmethod

图6 不同融合策略下2目标综合轨迹分布Fig.6 Two targets'trajectory distribution by differentmethod
从图7中可以看出,只有采用自适应融合策略的跟踪方法很好的实现了对2个交叉目标的跟踪。对于乘性策略来说,2个目标交叉时目标1虽然可以持续跟踪下去,但跟踪很不稳定,在交叉后不久即丢失目标;在交叉时丢失目标2。对于加权和融合目标来说,由于跟踪较为稳定,目标1成功的实现了目标跟踪;而目标2交叉后不久丢失,是由于加权和融合的跟踪精度有所下降导致。对于本文所阐述的自适应策略来说,目标1及目标2均能成功的进行轨迹跟踪。在交叉前外界干扰较少时,自适应策略采用乘性跟踪,有利于跟踪的精确性;交叉前后自适应策略切换到加权和融合策略,有利于跟踪的稳定性;之后又切换回乘性跟踪,继续维持精确的目标跟踪。基于自适应多目标融合的跟踪中2目标交叉前后如图8所示.
不同融合策略下不同方向的估计值与实际值的误差e如下图8所示。

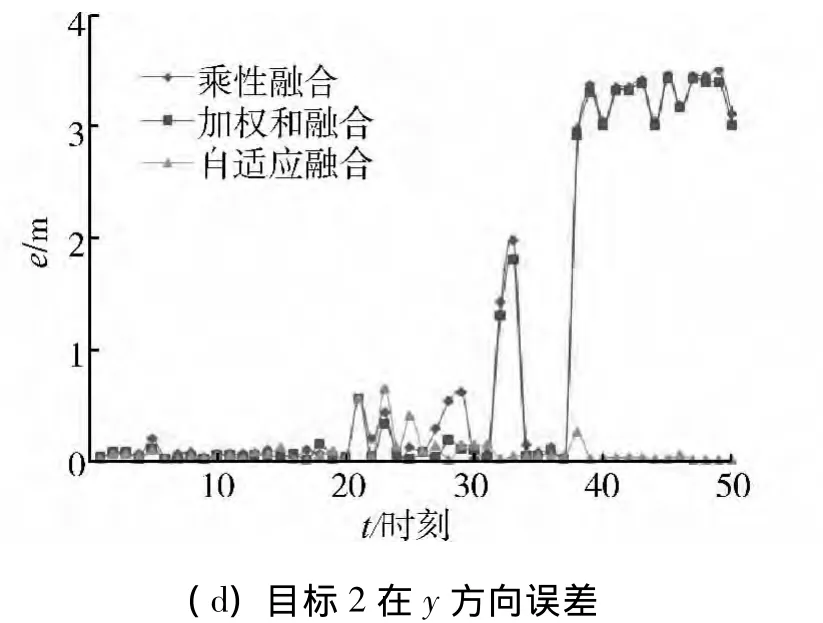
图8 不同融合策略下目标的方位误差Fig.8 Position error of the two targets by different methods
不同融合策略下的位置误差均方根如表3所示。

表3 不同融合策略下的位置误差均方根Table 3 Position error root-mean-square by differentmethods
由图8及表3可以看到:由于加性及乘性融合对目标2跟踪失败,导致位置误差均方根过大。而采用自适应融合,位置误差均方根较小,既能保留加性融合策略的稳定性,又能保留乘性融合策略的精确性。
5 结束语
本文通过采用2组水池实验数据进行算法验证,并与传统单一的融合策略进行对比,分析了各种融合策略的位置误差及误差均方根,得出了自适应融合策略的目标跟踪效果优于传统单一的融合策略的结论。此算法有效地改善了目标跟踪效果,对采用前视声呐进行多目标跟踪有很大的推动作用。但由于本文中用于得到各特征线索权值的模糊规则表是由经验得到的,在更复杂的运动跟踪场景中适用程度还有待验证,因此各特征线索权值的选取还需进一步研究。
[1]陈艳.基于高斯粒子滤波的水下目标跟踪技术[D].哈尔滨:哈尔滨工程大学,2010:35-44.CHEN Yan.Underwater target tracking technology based on Gaussian particle filter[D].Harbin:Harbin Engineering U-niversity,2010:35-44.
[2]LI P H,CHAUMETTE F.Image cues fusion for object tracking based on particle filter[C]//Proceedings of the 3rd International Workshop on Articulated Motion and Deformable Objects.Palma de Mallorca,Spain,2004.
[3]汪首坤,郭俊杰,王军政.基于自适应特征融合的均值迁移目标跟踪[J].北京理工大学学报,2011,31(7):803-809.WANG Shoukun,GUO Junjie,WANG Junzheng.Object tracking based on adaptive multi-cue integration mean shift[J].Transactions of Beijing Institute of Technology,2011,31(7):803-809.
[4]刘忠,周丰,石章松,等.纯方位目标运动分析[M].北京:国防工业出版社,2009:80-85.LIU Zhong,ZHOU Feng,SHI Zhangsong,et al.Beamgsonly targetmotion analysis[M].Beijing:National Defence Industry Press,2009:80-85.
[5]王萌.粒子滤波器重采样算法的研究与改进[D].哈尔滨:哈尔滨工程大学,2008:37-38.WANG Meng.Research and improvement of particle filter resampling algorithm[D].Harbin:Harbin Engineering University,2008:37-38.
[6]SPECHT D F.A general regression neural network[J].IEEE Transactions on Neural Networks,1991,2(6):568-576.
[7]孙君顶,毋小省.基于熵及不变矩特征的图像检索[J].光电工程,2007,34(6):102-106.SUN Junding,WU Xiaosheng.Image retrieval based on entropy and invariantmoments[J].Opto-Electronic Engineering,2007,34(6):102-106.
[8]唐振民,程勇,朱峰,等.灰度共生矩阵纹理特征的运动目标跟踪方法[J].南京理工大学学报,2010,34(4):459-463.TANG Zhenmin,CHENG Yong,ZHU Feng,et al.Object tracking method based on gray level co-occurrence matrix texture characteristic[J].Journal of Nanjing University of Science and Technology,2010,34(4):459-463.
[9]钟小品,薛建儒,郑南宁,等.基于融合策略自适应的多线索跟踪方法[J].电子与信息学报,2007,29(5):1017-1022.ZHONG Xiaopin,XUE Jianru,ZHENG Nanning,et al.An adaptive fusion strategy based multiple-cue tracking[J].Journal of Electronics and Information Technology,2007,29(5):1017-1022.