基于Auto LISP与Pro/E的凸轮机构建模与仿真
2014-10-24李雪军
李雪军 李 林
(衡阳财经工业职业技术学院,湖南 衡阳 421002)
引 言
Auto LISP是由Autodesk公司开发的一种LISP程序语言(LISP是List Processor的缩写)。Auto LISP语言作为嵌入在AutoCAD内部的具有智能特点的编程语言,通过Auto LISP编程,可对AutoCAD进行二次开发,使得AutoCAD通常无法完成的或较为复杂的绘图也变得简单。
Pro/Engineer是美国参数技术公司(PTC)旗下的CAD/CAM/CAE一体化的三维软件。Pro/Engineer软件以参数化著称,是参数化技术的最早应用者,在目前的三维造型软件领域中占有着重要地位,Pro/Engineer作为当今世界机械CAD/CAE/CAM领域的新标准而得到业界的认可和推广。是现今主流的CAD/CAM/CAE软件之一,特别是在国内产品设计领域占据重要位置。本文利用Auto LISP编程功能,在AutoCAD可绘制出复杂的凸轮轮廓曲线,再把该曲线文件导入Pro/Engineer中,借助Pro/Engineer强大的三维建模功能和仿真模块,仿真凸轮机构的运动状态,对凸轮机构进行运动学分析,分析其位移、速度、加速度等运动参数并进行优化设计。
1 利用Auto LISP编程在AutoCAD中绘制简谐运动规律凸轮轮廓曲线
1.1 Auto LISP编程
简谐运动规律凸轮轮廓曲线比较复杂,AutoCAD中一般是绘制不出来的,必须利用 Auto LISP编程,然后在AutoCAD中装载该程序,程序运行后并可自动获得凸轮轮廓曲线。
简谐运动规律(又余弦加速度运动)凸轮机构运动的特点是它的加速度正比于其位移,而方向相反。
S=(h/2)*(1-cosθ)
θ=π* (δ/δ0)
推程时推杆的运动方程为:
位移方程:S=(h/2)*[1-cos(π* (δ/δ0))];
速度方程:v=(πhω/2δ0)*sin(π* (δ/δ0));
加速度方程:а=(π2hω2/2δ02)*cos(π* (δ/δ0));
回程时推杆的运动方程为:
位移方程:S=(h/2)*[1+cos(π* (δ/δˊ0))];
速度方程: v=-(πhω/2δˊ0)*sin(π* (δ/δˊ0));
加速度方程:а=-(π2hω2/2δ02)*cos(π* (δ/δˊ0));
设 h=35, r=50, 0。~130。推程, 130。~190。远程休止,190。~320。回程,320。~360。近程休止。
Auto LISP程序清单如下(用auto LISP绘制简谐运动规律的凸轮轮廓线):
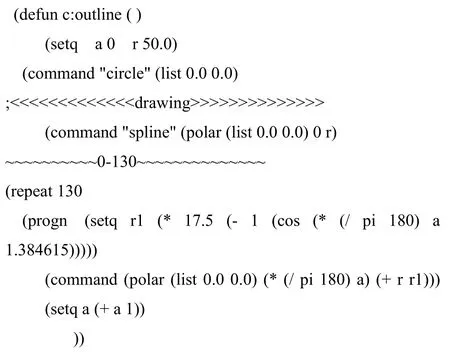
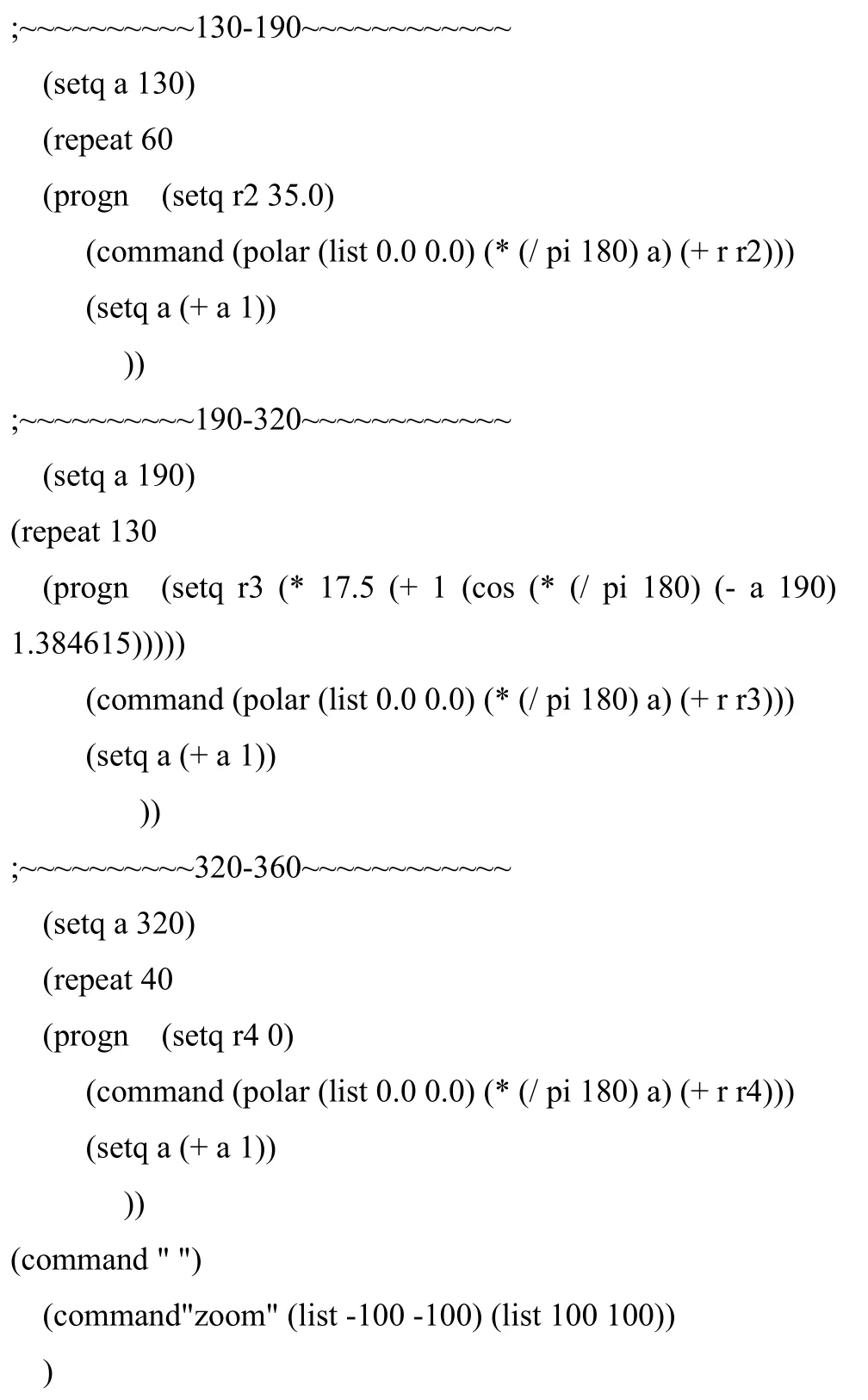
在AutoCAD 2008中,打开菜单【工具】【/AutoLISP(I )】/【Visual LISP编辑器(V)】窗口,在Visual LISP编辑窗口中输入Auto LISP源程序,然后检查程序编写的正确性,检查无误后保存文件,加载该程序,并在Visual LISP控制台中输入函数c:outline,再进入AutoCAD的命令窗口输入outline,就可以在AutoCAD中画出要画的凸轮轮廓曲线,如图1所示。并把仅把凸轮轮廓曲线保存为cam.dxf文件。

图1
1.2 在Pro/E中创建凸轮的三维模型
(1)运行Pro/,在Pro/E中,打开【文件】/【新建】,在弹出的对话框中选择【零件】、【实体】,在名称栏内输入cam,不选中使用缺省模板,在新文件选项中选用mns_part_solid为模板,单击【确定】,进入Pro/E三维建模环境。接着再选择菜单栏【插入】/【共享数据】/【自文件】,选择在 AutoCAD中画出并保存的 cam.dxf文件,再选择Pro/E三维建模环境中的坐标系。结果如图2所示。
(2)根据凸轮的几何尺寸,利用 Pro/E强大的三维建模功能,创建好凸轮的三维模型,如图3所示。
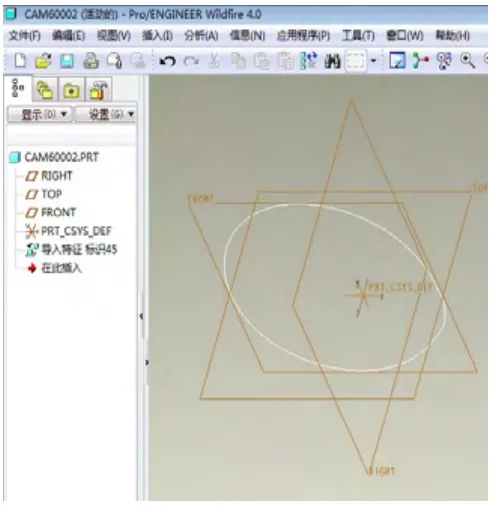
图2
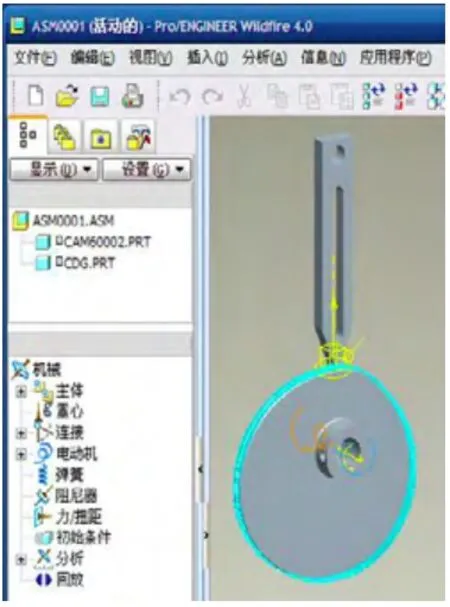
图3
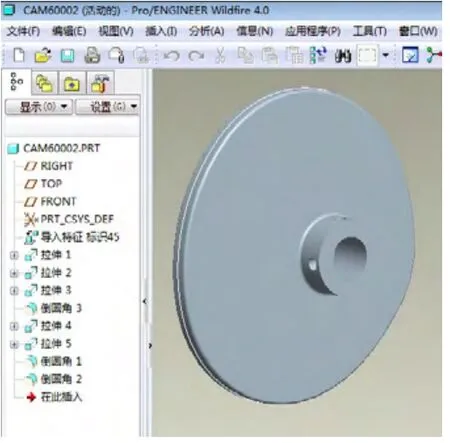
图 4
2 凸轮机构运动仿真
2.1 凸轮机构的装配
机构装配是机构运动仿真的前提条件,装配关系的正确与否直接影响着运动仿真的结果。在Pro/E中,打开【文件】/【新建】,在弹出的对话框中选择【组件】、【设计】,在名称栏内输入asmcam,不选中使用缺省模板,在新文件选项中选用mns_asm_design为模板,单击【确定】,进入Pro/E机构装配环境。接着按照机构装配法则和各构件间的运动副相应的约束规则,把各构件进行正确的连接,结果如图4所示。
2.2 凸轮机构运动仿真
在凸轮机构装配完成后就可以进行机构的运动仿真设置了。首先单击【应用程序】/【机构】进入运动仿真设置环境,首先向模型中添加伺服电动机,单击【伺服电动机】按钮,打开【伺服电动机定义】对话框,在【类型】选项卡中【从动图元】选择【运动轴】,并选择凸轮回转中心线作为连接伺服电动机人轴;在【轮廓】选项卡中【规范】组框中选择“速度”,【初始位置】选择“当前”,【模】选择“常数”,【A】框中输入伺服电动机的转速为36,【图形】√选“位置”、“速度”、“加速度”和“在单独图形中”,对话框内容设置好后,单击“确定”。接着就可以执行运动分析,单击【机构分析】,打开【分析定义】对话框,在【名称】栏内自动填写(如AnalysisDefinition9),在【类型】栏内选择“位置”,确定凸轮运动的开始时间为0,中止时间为10,初始位置选择“当前”,其他选项默认系统设置,单击【运行】按钮,就可以看到凸轮机构的运动情形,单击点拖动工具,就可以拍下机构在某个位置时的快照。对于运动仿真的过程,还可以进行回放,并制成多媒体动画视频文件,在其他视频播放软件中播放。
2.3 凸轮机构运动结果分析
选择运动学分析类型,单击运行按钮可以观察凸轮机构的运动情况。单击【测量】按钮,系统弹出【测量结果】对话框,在【图形类型】栏内选择“测量与时间”,在【测量】栏内新建三个测量 measure1、 measure2、measure3,分别对应“推杆顶点位移”、“推杆顶点速度”、“推杆顶点加速度”,并按【测量定义】对话框的要求一一设置好,这样就可以得到分析结果了。下面图5是推杆顶点位移曲线、图6是速度曲线、图7是加速度曲线,它们都与理论计算值一致,说明仿真正确。
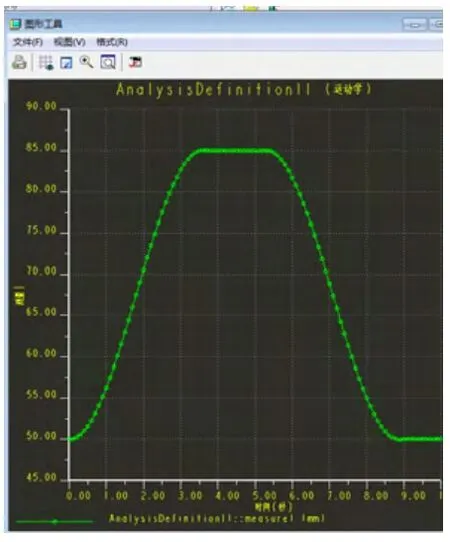
图 5
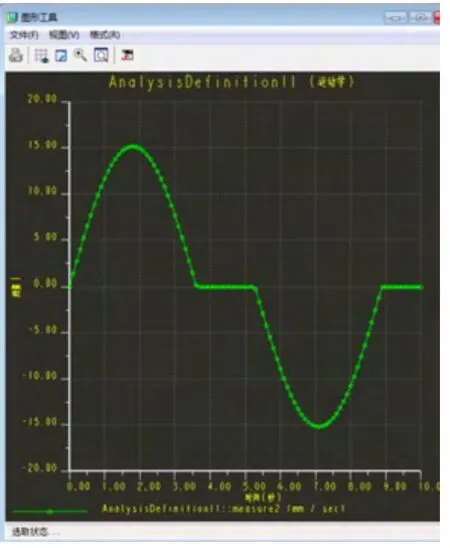
图 6
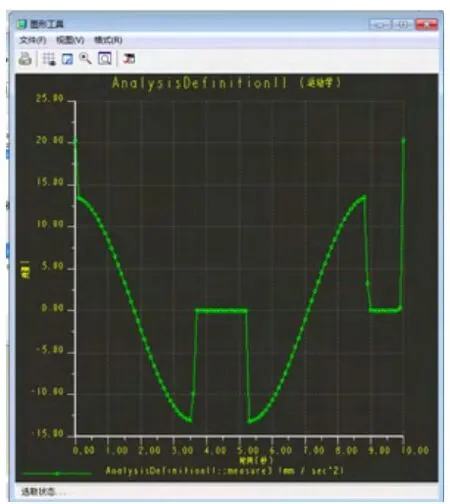
图 7
3 结论
本文使用Auto LISP与Pro/E软件联合建立了凸轮机构的三维模型,并应用 Pro/E软件的机构模块(Mechanics)完成了运动学分析和仿真。通过对凸轮机构的运动分析可以研究其上各点的轨迹、位移、速度、加速度等运动参数,不仅可以评价从动件的运动规律是否满足工作要求,机构是否发生运动干涉,而且还可以通过仿真方案,修改凸轮的曲线参数来改变从动件的运动规律。通过改变更新装配主模型达到对机构进行优化设计,为凸轮机构的研究、设计和生产提供一种全新而可靠的方法。
[1]郭剑峰,陈杉,王宁.用 Visual Lisp 开发AutoCAD 2000 应用程序[M].北京:人民邮电出版社,2000.
[2]曹云鹏.基于Pro/E二次开发技术的凸轮零件设计[D].北京:华北电力大学,2006.
[3]代明,张文信.凸轮机构的运动仿真设计[J].机电产品开发与创新,2006,(1):75-76.
[4]闫向彤..基于Pro/E的凸轮机构的三维建模和运动仿真[J].组合机床与自动化加工技术,2009,(7):11-15.
[5]陈云召,王豪.基于Pro/E的凸轮机构的设计仿真及运动分析[J],机械工程师,2010,(9):33-34.
[6]白秀娟,叶蓓蓓.基于Pro/E的凸轮机构的运动仿真设计[J],机械工程自动化,2009,(6):184-185.
[7]肖乾,周新建.基于Pro/E的凸轮机构的设计与运动仿真分析[J],煤矿机械,2006,(8):76-78.
[8]林清安.Pro/E零件设计高级篇(下)[M].北京:北京大学出版社,2000.