加速度计I/F变换电路数字补偿方法
2014-10-21黄丽娟邵志浩郑永强
黄丽娟,邵志浩,郑永强,李 丽
(湖北航天技术研究院 总体设计所,武汉 430040)
加速度计I/F变换电路数字补偿方法
黄丽娟,邵志浩,郑永强,李 丽
(湖北航天技术研究院 总体设计所,武汉 430040)
石英挠性加速度计的输出 I/F变换电路存在分辨率与线性度互为矛盾的现象,也是目前困扰国内惯导产品精度提升的普遍问题。文中通过对现有 I/F变换电路的电路原理、影响输出分辨率和线性度的主要原因、电路中元器件的参数特性等进行了详细分析,提出了一种全新的数字补偿算法,可以在不改变现有硬件的基础上,用软件实现线性度的算法补偿,并给出了完整的数字补偿计算公式和各参数的获取方法。经过惯导产品的试验验证,该算法可以使 I/F变换电路的线性度提高一个数量级。I/F变换电路数字补偿算法不仅有效解决了电路分辨率与线性度互为矛盾的问题,且易于实现,同时还可以大大简化生产中繁琐的硬件调试过程,具有较高的工程应用价值。
惯导系统;石英挠性加速度计;I/F变换;线性度;数字补偿
惯导系统的精度是飞行器的重要指标,也是提高飞行器应用能力的关键内容之一。其中,敏感弹体线速度的重要部件为加速度计,目前国内惯导产品中应用较成熟广泛的加速度计是石英挠性加速度计。石英挠性加速度计输出与敏感轴加速度成正比的电流信号,该电流信号需要经相应处理后最终得到敏感轴方向的加速度。常用的电流测量方法包括I/F变换、V/F变换[1]、A/D转换[2]、调宽脉冲反馈[3]等方法。其中I/F变换对输入电流信号进行积分,对噪声具有平滑抑制作用,具有良好的抗干扰性能,在加速度计信号处理方面得到广泛应用。
国内石英挠性加速度计批量生产可以达到的精度水平约为:分辨率10 μg、线性度1.0E-05。实际设计中,受 I/F变换电路中相关元器件参数、输出量程等因素的影响,无法同时保证全量程输出的线性度与转换后的实际分辨率,为国内惯导产品I/F变换电路普遍存在的问题[7-8]。目前常用解决方法包括:一种是先降低I/F变换电路转换频率,保证I/F变换电路线性度;后级增加A/D转换电路,对I/F变换电路输出的脉冲信号进行细分处理,提高小信号的输出实时性[4]。另一种是对输出脉冲与输入电流进行多项式拟合,然后通过软件进行补偿[5]。
上述第一种方法已经应用到成熟产品上,确实大大提高了加速度计通道的输出当量。但因为 I/F变换电路的积分波形在动态时很不规则,导致动态信号在A/D 转换时会出现较大误差,因此,在设计中为了避免A/D的动态输出误差,仍然采用I/F变换电路的输出脉冲来保证最终输出脉冲数的正确性。也就是说,在动态时,惯导系统加速度计通道的实际输出分辨率仍然由I/F变换电路的转换频率来决定。该方法可以在一定程度上提高加速度计的静态分辨率,却降低了动态信号的分辨率,特别是在动态小信号应用场合(如发射前的初始调平、飞行过程中的小推力滑行等)时,加速度计通道的输出存在明显地跳变现象。
本文通过对现有 I/F变换电路的电路原理、影响输出当量的主要原因、元器件的参数特性等进行了详细分析,提出了一种有效的数字补偿算法,该算法可以在不改变现有硬件电路、不增加额外器件的基础上,在一定程度上解决 I/F变换电路分辨率与线性度互为矛盾的问题,从而达到提高惯导产品加速度计通道精度的最终目的。
1 I/F变换电路机理分析
1.1 I/F变换电路原理
I/F变换电路包括基本恒压源、正负通道恒流源、积分电路、电压比较及脉冲输出电路、充放电回路、频标电路等几部分组成,电路原理框图见图1。

图1 I/F变换电路原理框图Fig.1 Schematic of I/F converter
以正向通道为例,I/F变换电路的工作过程是:加速度计输出的电流进入到积分器的输入端,在积分器的输出端得到积分锯齿波,当锯齿波幅值达到设定电压门槛值时,电压比较电路的输出端输出一个脉冲信号(脉冲信号的宽度是频标频率的周期);同时,这个脉冲信号启动放电回路控制,通过恒流源泄放积分器中的电量,放电时间也是频标频率的周期,之后电压比较电路的输出端翻转,结束一个脉冲的转换。
1.2 电路输出的非线性问题
通过对电路输出脉冲数进行测试与分析发现,I/F变换电路中,输出量程的前半段线性度较高(图2所示的K前);在量程的一半时出现一个拐点,后半段出现另一个斜率(图2所示的K后),使整个量程内线性度较差。

图2 电路板输出线性度测试情况示意图Fig.2 Output linearity test
在实际测量中还发现,电路设计的频标频率越高、线性度越差,这也就是前面所说的线性度与分辨率(当量)不能同时保证的问题。且量程越大,上述矛盾越明显。
1.3 影响输出的原因及机理分析
加速度计的输出电流到I/F变换电路的积分器积分,当积分电压达到一定幅值后,由比较电路控制充放电回路中的开关三级管导通(或截止),从而使恒流源(I0)向积分器充电(或放电),充电(或放电)的时间T固定,得到Q=I0·T,这个过程即得到一个量化后的脉冲(也可以理解为一个电量单位Q)。在理想情况下,一个电量单位的电量Q= I0·T,见图3所示阴影区域的面积(Q)。

图3 理想状态下的一个电量单位Fig.3 Theoretical electric quantity
经过对电路各关键电路、各元器件的参数及实测数据进行研究分析发现,在一定的频率范围内,I/F变换电路中影响输出线性度的主要因素是充放电回路中的开关三级管[6]。这是因为开关三极管在导通和截止时,都有一定的沿宽,且前后沿宽不相等,这就导致电量单位Q≠Q'(见图4所示,Q为一个理想的电量单位,见右斜线阴影面积;Q'为实际转换的电量单位,见左斜线阴影面积;中间为二者重叠部分)。

图4 实际与理想状态下的电量单位对比示意图Fig.4 Comparison between theoretical and real electric quantity
由此可以分析出如下结论:假定在一段时间内输入的电量为q,理想状态下转换的脉冲数应为 N=q/Q;因为电路中存在转换误差,实际上得到的脉冲数N'≠N。
另外,积分器的输出波形又与输入的电流大小有关。以26 mA(约20g)的设计量程为例,在加速度电流为1 mA、8 mA、13 mA、20 mA、25 mA时,积分波形、比较输出的脉冲波形如图5所示。
假定电路中的最大输入加速度电流为I0(即电路设计的最大量程,图5中为26 mA),ΔQ=Q'-Q,根据上述两方面的现象,可以得到如下分析结果:
A) 输入的加速度电流i1<i2≤I0/2(即不大于全量程的一半)
在一定时间t内,i1、i2充电(或放电)周期个数分别与对应的输出脉冲个数N1、N2相同,也即开关电路的翻转次数M1=N1、M2=N2。因此,时间t内的电量q1、q2为:

有N1/N2= i1/i2也就是说,转换后的脉冲数仍然呈线性关系,只是斜率与理想状态不同。
B) 输入加速度电流I0/2<i1<i2<I0(即大于全量程的一半)
在一定时间t内,i1、i2充电(或放电)周期个数与对应的输出脉冲个数不相同,开关电路的翻转次数M1<N1、M2<N2;且随着电流的增大,翻转次数在递减,即M2<M1。因此,时间t内的电量q1、q2为:


有 N1/N2<i1/i2(当ΔQ>0时)或 N1/N2>i1/i2(当ΔQ<0时)。也就是说,输入不同电流的比值与转换后脉冲数的比值已经不是完全的线性关系。

图5 在不同输入加速度电流时的积分波形、输出脉冲波形Fig.5 Integral curves and output pulses for different current inputs
2 补偿算法
可以根据上述分析结果,找到一种数字补偿算法,得到一个近似于理想状态的新斜率,见图6所示的K'。
线性度补偿算法的基本思路是:因为只有在输出波形出现一个上升沿和下降沿对时,才会出现一个ΔQ=Q'-Q;当过程中开关管没有出现翻转时,认为一个脉冲的电量仍然为Q。因此,在整个量程内,需要找到一个补偿系数,只对有上升沿、下降沿对的脉冲进行补偿即可。

图6 算法补偿前和补偿后的斜率示意图Fig.6 Slope schematic before and after compensation
通过实际测试,可以得到如下初始参数:I/F变换电路中充放电的开关次数M、补偿前实际输出脉冲数N(输出脉冲数是由输出脉冲波与频标相与之后得到的脉冲数),得到补偿后接近理想状态的输出脉冲数N理为:

式中的K即为补偿系数。经过分析推理、计算及反复测试,最终得到了I/F变换电路的线性度补偿公式:

式中,KL+为正向通道的补偿系数;KL-为负向通道的补偿系数;i1为补偿前,输入电流1(经测算,一般取量程I0的约1/6);i2为补偿前,输入电流2(经测算,一般取接近量程I0的一个电流值);Ni1为输入电流i1时对应的脉冲数(每秒);Ni2为输入电流i2时对应的脉冲数(每秒);Ni0为输入电流0时对应的脉冲数(每秒);F为频标频率。
3 测试结果
利用惯组后级数据处理电路实现了软件数字补偿算法及验证,验证测试的I/F变换板频标频率128 kHz、电流量程约26 mA,补偿前、后的30 s累积脉冲数及线性度计算结果如表1 ~表3所示,其中,表1为正向通道补偿前、补偿后的输出脉冲数,表2为负向通道补偿前、补偿后的输出脉冲数,表3为线性度计算结果,图7为正向通道补偿前、补偿后的脉冲输出曲线,图8为负向通道补偿前、补偿后的脉冲输出曲线。
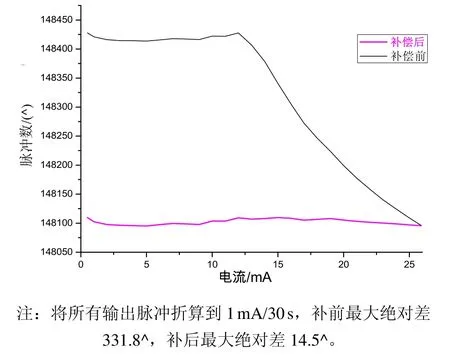
图7 正通道补前、补后均折算到1 mA/30 s的脉冲数对比曲线Fig.7 Comparison of pulse curve converted to 1 mA/30 s of positive channel before and after compensation
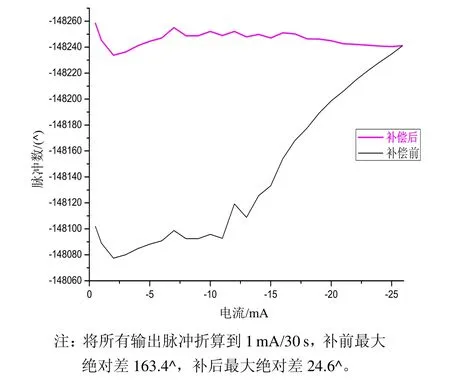
图8 负通道补前、补后均折算到1 mA/30 s的脉冲数对比曲线Fig.8 Comparison of pulse curve converted to 1 mA/30 s of negative channel before and after compensation

表1 正向通道补偿前、补偿后的输出脉冲数Tab.1 Output pulse number of positive channel before and after compensation

输入电 输出翻转次数补偿前脉冲数补偿后脉冲数 备流/mAM (^/30 s)N前 (^/30 s)N后 (^/30 s)注22 580 541 3 259 457 3 258 237 23 432 795 3 407 202 3 406 299 24 285 036 3 554 963 3 554 377 25 137 302 3 702 696 3 702 427 25.9 4 333 3 835 665 3 835 682补偿系0.997 854 427 751 263数K+
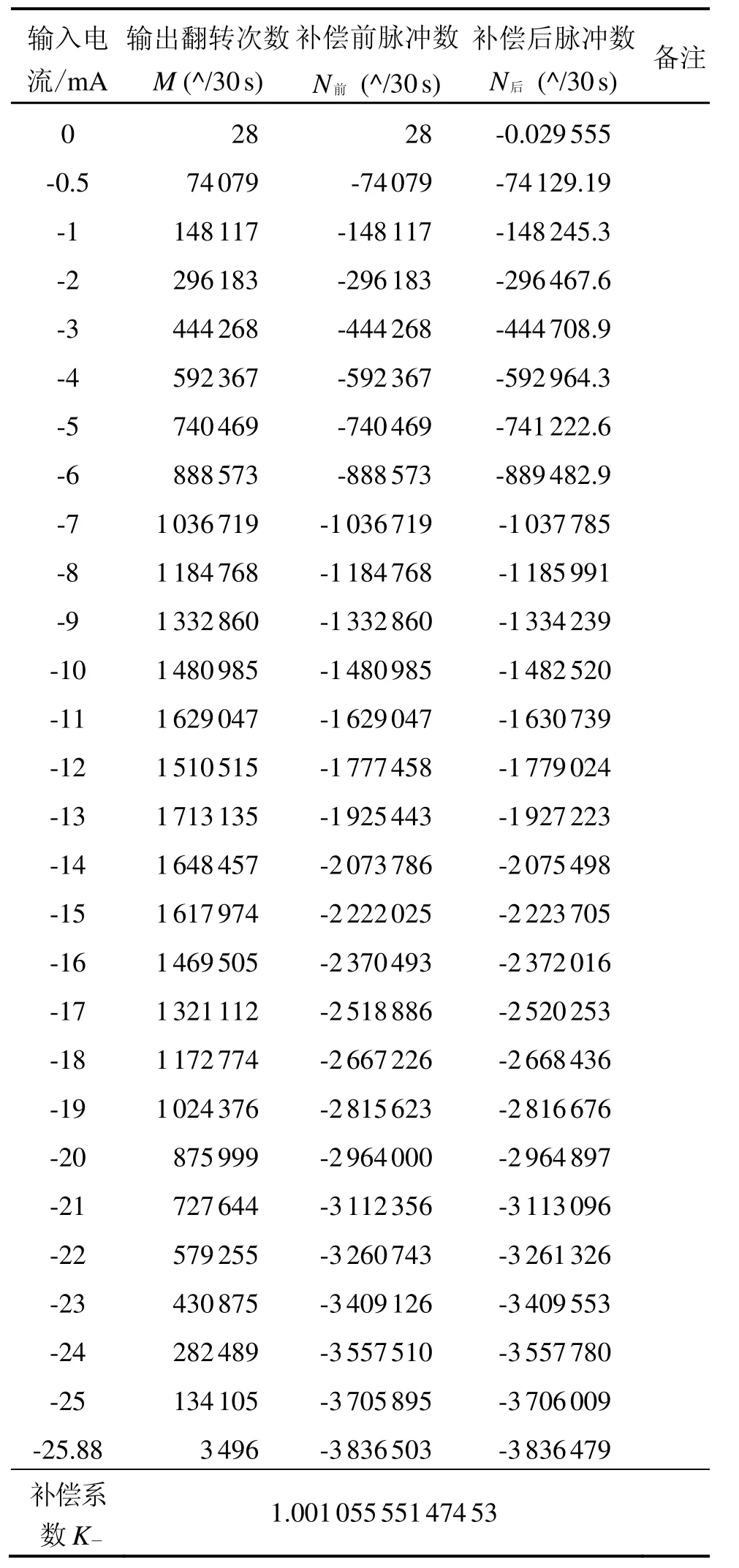
表2 负向通道补偿前、补偿后的输出脉冲Tab.2 Output pulse number of negative channel before and after compensation

表3 补偿前、补偿后的线性度Tab.3 Linearity before and after compensation
4 结 论
本文通过理论分析及测试验证,提出了一种加速度计 I/F变换电路新型数字补偿算法,在不改变现有I/F变换板硬件电路的情况下,利用软件进行数字算法补偿,可以将 I/F变换电路的输出线性度提高一个数量级,特别是在继续提高电路频标频率后,优势更为明显。用这种数字补偿算法,不仅提高了加速度计通道的静态精度,同时也提高了动态精度。
此外,该算法在惯导产品中较易实现,结合对称性补偿公式后,I/F变换电路板在生产中完全不需要繁琐的硬件调试过程,大大简化了产品的调试工作量,具有较高的实用价值。
(References):
[1] Azcona C, Calvo B, Celma S, et al. Ratiometric voltageto-frequency converter for long-life autonomous portable equipment[J]. IEEE Sensor Journal, 2013, 13(6): 2382-2390.
[2] 宋雪杰,王晓东,韩军海. 电流/频率转换类型综述[J].导航与控制,2009,8(1):31-38.
SONG Xue-jie, WANG Xiao-dong, HAN Jun-hai. The analysis of the type of the current/frequency converter[J]. Navigation and Control, 2009, 8(1): 31-38.
[3] 宋雪杰,赵毅,王晓东. 石英挠性加速度计I/F转换电路软件补偿研究[J]. 导航与控制,2010,9(2):52-55.
SONG Xue-jie, ZHAO Yi, WANG Xiao-dong. The compensation research of current-frequency converter of quartz[J]. Navigation and Control, 2010, 9(2): 52-55.
[4] Zhao Tong, Jiang Jianwei. The nonlinear compensation of output frequency of the I/F converter[C]//Mechanic Automation and Control Engineering, 2011: 1782-1785.
[5] Wu Qisong, Yang Haigang, Yin Tao, et al. A high precision CMOS weak current readout circuit[J]. Journal of Semiconductors, 2009, 30(7): 075011 1-6.
[6] 苗新法,王秀华,张明柱,吴荣斌. 闭环加速度计的控制数字化分析[J]. 中国惯性技术学报,2014,22(2):242-247.
MIAO Xin-fa, WANG Xiu-hua, ZHANG Ming-zhu, WU Rong-bin. Analysis of digital controller for closed-loop accelerometer[J]. Journal of Chinese Inertial Technology, 2014, 22(2): 242-247.
[7] Curey R, Ash M E, Havlicsek H, et al, IEEE Recommended practice for precision centrifuge testing of linear accelerometers[EB/OL] .[2011-09-03]. http://standars .ieee.org/findstds/standard/836-2009.html.
Digital compensation for I/F converter of accelerometer
HUANG Li-juan, SHAO Zhi-hao, ZHENG Yong-qiang, LI Li
(Designing Institute of Hubei Space Technology Academy, Wuhan 430040, China)
The resolution and linearity of quartz flexible accelerometer’s I/F converter are contradictory. Nowadays, this problem prevents the improvement of I/F converter of inertial measurement unit(IMU). By analyzing the existing I/F converter, including the circuitry, the main reasons that affect the output resolution and linearity, and the parameter characteristics of electronic components, a new digital compensation method is put forward. It applies software to realize the linearity’s compensation without changing any hardware, and the compensation formula and parameter calculation are given. The experiments show that the linearity of I/F converter circuit can be improved by an order of magnitude. This method resolves the contradictory of resolution and linearity, simplifies the process of hardware debug, and is easy to implement.
INS; quartz flexible accelerometer; I/F converter; linearity; digital compensation
黄丽娟(1971—),女,高级工程师,从事飞行器惯导产品的设计与研究。E-mail:huanglijuan_825@163.com
1005-6734(2014)04-0547-05
10.13695/j.cnki.12-1222/o3.2014.04.023
TJ765.4
A
2014-03-28;
2014-07-04
国防863项目(2006AA702106)