分光再利用型激光多普勒测速仪及其与捷联惯导组合导航
2014-10-21聂晓明龙兴武
聂晓明,周 健,魏 国,龙兴武
(国防科学技术大学 光电科学与工程学院,长沙 410073)
分光再利用型激光多普勒测速仪及其与捷联惯导组合导航
聂晓明,周 健,魏 国,龙兴武
(国防科学技术大学 光电科学与工程学院,长沙 410073)
为了抑制惯性导航系统的误差累积效应,提出了用激光多普勒测速仪与捷联惯导进行组合。基于分光再利用的思想设计了新型光路结构的激光多普勒测速仪,并详细讨论了激光测速仪与捷联惯导组合进行航迹推算的过程。理论分析和实验结果表明,分光再利用型激光多普勒测速仪测量精度高、数据有效性及稳定性好,将其用于车载惯性导航系统大大提高了导航精度,位置误差由纯捷联惯导2 h 1166 m提高到组合系统2 h 20 m。
激光多普勒测速仪;捷联惯导;分光再利用;航迹推算
随着惯性技术的飞速发展,导航系统越来越广泛地引起人们的重视,已成功应用于军用与民用的众多技术领域中,如宇宙飞船、火箭、导弹、飞机、坦克、舰船等各种运载器上。作为最有发展前途的一种导航系统,惯性导航系统(inertial navigation system,INS)具有完全自主、隐蔽性好、不依赖环境条件、抗干扰能力强等诸多优点。但是INS的误差随时间积累,这就导致它的定位误差随工作时间而发散[1]。
为了提高导航精度,对于车载惯性导航系统而言,零速修正技术[2-4]已经得到了广泛的应用,但是它需要车式载体周期性地停止,这大大影响了载体的灵活性和机动性。另外,里程计、多普勒计程仪和白光测速仪也常常被用来与捷联惯导系统进行组合导航[5-7],但是它们都存在固有的缺陷。里程计受地面环境影响较大,车轮跳动、打滑及变形都会给测量带来误差。多普勒计程仪通常以声波或微波为媒介,而声波或微波的方向性差,从而导致其测量精度不高。白光测速仪是基于空间滤波技术,它的测量景深非常小,信号丢失非常严重,常用的软件补偿方式使得其测量精度得不到保证。
自从1964年Yeh等人证实了可利用激光多普勒频移技术来确定流体速度[8],激光多普勒测速仪(laser Doppler velocimeter, LDV)就以其测量精度高、线性度好、动态响应快、测量范围大及非接触测量等特点在航空、航天、机械、能源等领域得到快速的发展[9-11]。然而,针对实际应用环境,LDV在信号丢失、测量景深与精度不足、稳定性差等方面的困难,导致其在惯性导航系统中迟迟得不到应用。为了对车载惯性导航系统进行速度校准与修正,本文设计分光再利用型激光多普勒测速仪并将其与捷联惯导组合导航,在不影响载体灵活性、机动性的基础上大大提高导航精度。
1 LDV基本原理及其与捷联惯导组合进行航迹推算
1.1 分光再利用型激光多普勒测速仪的基本原理
激光多普勒测速技术是基于光学多普勒效应,利用运动物体散射光的多普勒频移与其运动速度之间的线性关系,通过探测多普勒频率检测出被测物体的运动速度。激光多普勒常见的测量模式有三种:双光束差动模式、参考光模式和自混合模式,其中参考光模式适合测量车式载体自身的速度。这是因为,双光束差动模式不能进行离焦测量(待测体必须始终位于两束光的相交区),而车式载体在运行过程的颠簸摇摆,会改变探头到地面的距离;自混合模式,由于它是通过检测激光器后端输出光强的波动频率进行测量的,所以当工作电流和外界温度发生改变时,光强也会相应地改变,这将严重影响多普勒频率测量精度。
传统参考光模式激光多普勒测速仪的光路结构如图1所示,激光器出射的激光束被分成等光强的两束,一束作为参考光被全反镜返回入射到探测器;另一束作为信号光经被测物体散射沿原路返回,最终与参考光在探测器的光敏面上进行混频。根据多普勒效应可知,信号光与参考光的频率差即多普勒频率与物体运动速度成正比,两者之间的关系为

式中,fD是多普勒频率,v是待测物体的运动速度,θ是测速系统的发射倾角,λ是激光束的波长。通过探测多普勒频率即可解算出物体的运动速度

由光路结构分析可知,为了与微弱的散射回波匹配而获得较高的外差效率,参考光的主要能量被衰减了,激光束的能量没有得到充分利用,这会大大影响多普勒信号的强度。由于信号光两次经过分束器,依次是透射和反射,所以并不能通过改变分束器分束比的方式来提高光能利用率。

图1 传统参考光模式激光多普勒测速仪光路结构Fig.1 Optical structure of conventional reference-beam LDV
为了解决传统参考光束型激光多普勒测速仪中光能利用率低的问题,文章基于分光再利用的思想,设计了新型光路结构的LDV,如图2所示。新型结构的LDV将传统参考光模式中本振光路中的衰减片换成一个 45°放置的高反射率镜片 BS2,这样一方面既保持了原结构中参考波与回波强度匹配的优点;另一方面,通过增加高反镜M3和中心带孔的高反镜M4使得原结构中被衰减片衰减掉的那部分光又重新被利用起来,大大增强了探测光的光强,从而提高了回波信号的强度,也进一步提高了测量准确性。
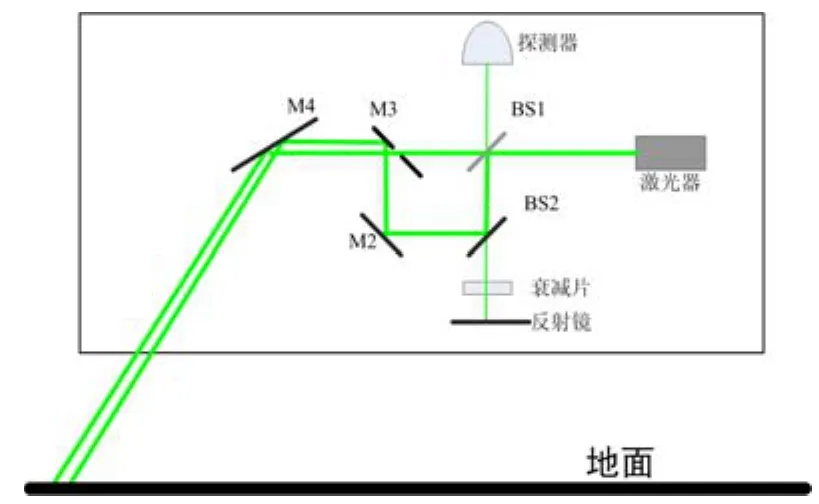
图2 分光再利用型激光多普勒测速仪的光路布置Fig.2 Optical arrangement of split-reuse type LDV
1.2 LDV与捷联惯导组合进行航迹推算
新型结构的LDV测量精度高,数据有效性好,所以可以用其与捷联惯导组合进行航迹推算,组合系统的结构框图如图3所示。首先捷联惯导需要在静态条件下依靠GPS的位置信息进行快速对准;其次由于 LDV在安装过程中存在安装误差角,这就导致LDV的比例因子存在安装误差,需要借助车式载体运行直线,根据运行距离来标定LDV的比例因子,最后利用捷联惯导的航向信息和LDV的速度信息进行航迹推算。

图3 LDV与捷联惯导组合系统的结构框图Fig.3 Structure of the integrated system using LDV together with strapdown inertial navigation
2 实验结果与分析
利用所设计的分光再利用型激光多普勒测速仪测量转台的转速,这里转台是瑞士生产的高精度速率转台,转速稳定性高达 10-5。通过软件控制转台在某一恒定的转速下转动,并将测速仪的测量结果与设定值比较,得到速度测量的相对误差曲线,如图4所示。根据 1 h的实验结果计算得出 LDV的测量精度为0.285%,因此可将它用于车载惯性导航系统。

图4 LDV速度误差曲线Fig.4 Velocity error of LDV
将惯性测量单元(inertial measurement unit,IMU)、LDV、GPS安装在车式载体上进行了车载实验(跑车路线如图5所示)。实验中使用的GPS的定位误差小于5 m,动态速度误差小于0.05 m/s。跑车过程中以GPS得到的速度为参考,分析捷联惯导和LDV的速度误差,并以GPS得到的位置为基准计算捷联惯导和组合系统航迹推算的位置误差。
图6为所得GPS、IMU和LDV速度测量的结果,其中图6(a)是三种设备所得的速度曲线,图6(b)是以GPS测得的速度值为参考,IMU及LDV的速度误差曲线。

图5 车式载体运行路线Fig.5 Running path of the vehicle

图6 GPS、IMU和LDV速度测量结果.;Fig.6 Velocity measurement results of GPS, IMU and LDV.
图7为航迹推算的结果,其中图7(a)是IMU航迹推算的位置误差曲线,图7(b)是LDV与IMU组合系统航迹推算的位置误差曲线。
由图6(a)可知,三种设备所测得的速度值大致吻合。图6(b)显示IMU的速度测量误差比LDV的速度误差大,其中IMU的速度误差是发散的,LDV速度值的离散性较好,这主要是因为IMU存在误差累积,而LDV没有误差积累的过程。图6(b)中存在毛刺是因为车式载体在运行过程中GPS出现了丢星现象。
根据图7中航迹推算的结果可知,由于IMU存在误差累积效应,纯捷联惯导2 h的位置误差较大,为1166 m;而 LDV与捷联惯导组合系统的位置误差较小,为20 m。LDV与捷联惯导组合,大大抑制了捷联惯导的误差累积效应,提高了导航精度。
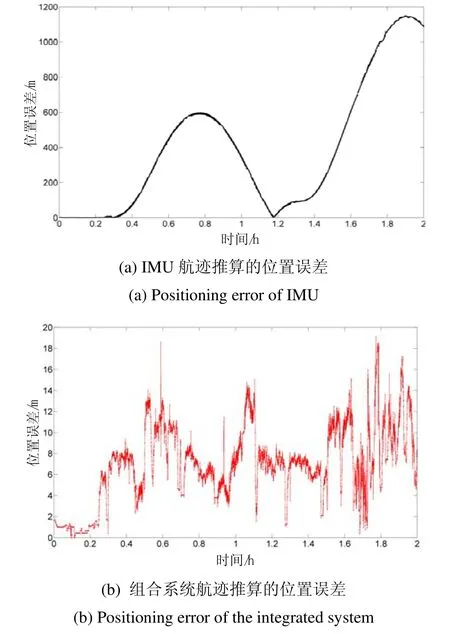
图7 航迹推算结果Fig.7 Navigation results
3 结 论
文章所设计新型光路结构的 LDV具有测量精度高、光能利用率高及稳定性好的特点,将其与捷联惯导组合可以大大抑制导航系统的误差累积效应,提高了导航精度。另外,由于所设计的LDV是一维结构,因此跑车过程中车式载体的上下颠簸会引入一定的速度误差,这也是 LDV的测速精度在跑车实验中不如实验室的主要原因。下一步的主要工作是设计实现二维结构的LDV,用其与捷联惯导组合必将进一步提高导航的精度。
(References):
[1] 秦永元,张红钺,汪叔华. 卡尔曼滤波与组合导航原理[M]. 西安:西北工业大学出版社,2012.
[2] 赵玉,赵忠,范毅. 零速修正技术在车载惯性导航中的应用研究[J]. 压电与声光,2012,34(6):843-852.
ZHAO Yu, ZHAO Zhong, FAN Yi. Study on application of zero velocity update technology to inertial navigation system[J]. Piezoelectrics & Acoustooptics, 2012, 34(6): 843-852.
[3] 赵小明,邓东黎,蒋志炜,等. 车载单轴旋转激光捷联惯导抗晃动初始对准和零速修正方法[J]. 中国惯性技术学报,2013,21(3):302-307.
ZHAO Xiao-ming, DENG Dong-li, JIANG Zhi-wei, HUANG Feng-rong, SUN Wei-qiang. Anti-disturbing alignment and ZUPT methods for land single-axis rotation laser SINS[J]. Journal of Chinese Inertial Technology, 2013, 21(3): 302-307.
[4] Li Leilei, Pan Yingjun, Lee Jong-Ki, et al. Cart-mounted geolocation system for unexploded ordnance with adaptive ZUPT assistance[J]. IEEE Transactions on Instrumentation And Measurement, 2012, 61(4): 974-979.
[5] 罗强力,韩军海. 车载捷联惯导与里程计组合导航技术研究[J]. 导航与控制,2011,10(4):6-11.
LUO Qiang-li, HAN Jun-hai. Research on SINS and OD integrated navigation system for land vehicles[J]. Navigation and Control, 2011, 10(4): 6-11.
[6] 彭立东,马海涛,许伟杰. DVL在组合导航技术中的发展应用[J]. 声学技术,2011,30(3):416-418.
PENG Li-dong, MA Hai-tao, XU Wei-jie. The development and application of DVL in integrated navigation technology[J]. Technical Acoustics, 2011, 30(3): 416-418.
[7] 李旭,张为公. 智能车辆SINS/DGPS/光电测速仪组合导航的研究[J]. 传感技术学报,2007,20(6):1437-1442.
LI Xu, ZHANG Wei-gong. SINS/DGPS/Speedometer integrated navigation for intelligent vehicle[J]. Chinese Journal of Sensors and Actuators, 2007, 20(6): 1437-1442.
[8] Yeh Y, Cummins H Z. Localized fluid flow measurements with an He-Ne laser spectrometer[J]. Applied Physics Letters, 1964, 176(4): 176-178.
[9] Maru K, Fujii Y. Wavelength-insensitive laser Doppler velocimeter using beam position shift induced by Mach-Zehnder interferometers[J]. Optics Express, 2009, 17(20): 17441-17449.
[10] Charrett T O H, James S W, Tatam R P. Optical fibre laser velocimetry: a review[J]. Meas. Sci. Technol., 2012, 23(3): 1-32.
[11] Maru K, Liu Yanhu, Rong Shenglu, et al. Twodimensional laser Doppler velocimeter using polarized beams and 90° phase shift for discrimination of velocity direction[J]. Optik, 2011, 122: 974-977.
[12] Maru K, Fujii Y. Differential laser doppler velocimeter with enhanced range for small wavelength sensitivity by using cascaded Mach–Zehnder interferometers[J]. Journal of Lightwave Technology, 2010, 28(11): 1631-1637.
Split-reuse type laser Doppler velocimeter and its integrated navigation with strapdown inertial navigation
NIE Xiao-ming, ZHOU Jian, WEI Guo, LONG Xing-wu
(College of Optoelectronic Science and Engineering, National University of Defense Technology, Changsha 410073, China)
In order to suppress the error accumulative effect of INS(inertial navigation system), an idea of building an integrated navigation system using laser Doppler velocimeter(LDV) together with strapdown inertial navigation is proposed. A novel LDV with advanced optical structure is designed based on split-reuse technique. And the process of dead-reckoning using LDV and strapdown inertial navigation is discussed. The results of theory and experiment show that the accuracy, data validity and stability of the split-reuse type LDV are excellent, which can significantly improve the positioning accuracy of the vehicle navigation system. The position error of 2 h 1166 m with the pure strapdown inertial navigation is decreased to 2 h 20 m by using the integrated system.
laser Doppler velocimeter; strapdown inertial navigation; split-reuse type; dead reckoning
联 系 人:龙兴武(1958—),教授,博士生导师。E-mail:xwlong110@sina.com
1005-6734(2014)04-0510-04
10.13695/j.cnki.12-1222/o3.2014.04.016
TN249
A
2014-01-30;
2014-06-16
国防自然科学基金项目(61308060)
聂晓明(1986—),男,在读博士生,主要从事光学检测技术方面的研究。E-mail:thudpim@gmail.com