数字化I/Q技术用于磁控管频率控制
2014-09-23钟少鹏赵明华张俊强
钟少鹏 赵明华 张俊强
(中国科学院上海应用物理研究所 嘉定园区 上海 201800)
中国科学院上海应用物理所直线加速器课题组承担了一台2 MeV电子直线加速器的建设任务。该加速器拟用于辐照加工,其能量为2 MeV以上,束流平均功率1 kW。根据加速器的束流指标要求,采用输出峰值功率为2.6 MW的GLM5193磁控管为加速管提供微波能量。微波系统的技术指标有:工作频率2 998 MHz,频率稳定范围<±25 kHz,加速管入口峰值功率1.9 MW,RF脉冲宽度4 μs,工作比 0.1%,重复频率250 Hz,加速管出口剩余功率<0.3MW,平均功率<300 W。加速器主体的方案见图1。

图1 加速器主体的方案图Fig.1 Framework layout of accelerator.
1 磁控管频率控制原理
由于温度、机械振动以及磁控管负载牵引会导致磁控管频率的漂移,使其偏离加速管所要求的工作频率,从而导致加速器电子束能量和效率下降以及能散恶化,所以需要一套自动频率控制系统(Automatic Frequency Control, AFC)对磁控管进行调谐,使其工作在2 998 MHz。传统的AFC系统主要有双腔鉴频以及行波控相[1]办法。随着数字化I/Q鉴相技术及FPGA商业产品的发展,基于FPGA平台开发应用的数字化I/Q技术得到广泛应用,其技术不断成熟,稳定性和可靠性早已在各类工程装置上得到广泛的验证,而其造价也不断降低。 将该项技术运用于磁控管的频率控制具有良好的可行性。谐振腔对信号具有相移特性,不同频率信号其相移量不同,在此方案中,观察磁控管输出信号经过一只通过式高Q谐振腔后的相位变化量,从而推定磁控管信号频率的变化量,其理论依据是谐振腔的失谐角q与工作频率f的关系[2],如式(1):

式中,Ql为腔体有载品质因素;f0为腔体谐振频率;f为输入腔体信号频率。
当f偏离f0不大时,二者关系如式(2):

具体方法是从磁控管输出取样来的信号分为两路,一路作为参考信号,一路经过一个频率2998MHz的谐振腔,当磁控管频率偏离2998MHz时,从谐振腔出来的信号会产生相应的相位偏移,运用下变频技术将两路信号都下变到 25.6MHz中频,经过数字化I/Q技术鉴相后比较两路信号的相位,其差值与磁控管工作频率的偏差值相关,此时控制器给出调整信号去调整磁控管的工作频率直至其回到加速器的工作频率。利用数字化I/Q鉴相技术测量信号通过谐振腔前后的相位差来反馈控制磁控管的频率,控制系统的原理图如图2。

图2 AFC控制系统的原理图Fig.2 Principle scheme of AFC control system.
2 数字化I/Q鉴相技术
AFC系统的一个重要技术是数字化I/Q 鉴相,鉴相测量精度决定了频率控制精度。在I/Q鉴相器中,调制解调器(Demodulator)可以将射频信号的幅度和相位信息分解成 I/Q信号[3],从直角坐标转换系到极坐标系,如图3所示。

图3 RF信号的幅度和相位信息分解Fig.3 Separated information of amplitude and phase.
根据获得I/Q数据的方式不同可以分为传统的模拟I/Q技术和数字化I/Q技术。数字化I/Q技术将RF输入信号和本地振荡信号LO进行混频,向下转换成一个中频信号,经过带通滤波器去掉混频信号中对系统有危害的高频信号,中频信号直接由模数转换器以4倍于中频的采样速率进行采样,这样采样的数据就以90°的间隔反映了RF输入的幅度和相位信息。如果定义第一个在 0°采样的数据为 I,下一个在90°采样的数据为Q,180°采样的数据为−I,270°采样的数据为−Q,那么下一个在360°采样的数据又为I,依此类推。ADC的输出提供了一个测量值为 I、Q、−I、−Q 依次重复的数据流[4],如图 4所示。

图4 数字I/Q技术Fig.4 Dataflow of digital I/Q technology.
这个数据流被一个2路选择器分割成两条数字路径,分别为I和Q,每一条数字路径分别经过一个乘法器依次冠以+和−(采样得到的信号自动带有正负号),最终的输出信号就是RF输入信号的I/Q分量。在FPGA中,对I/Q分量进行cordic算法求解,从而得到信号的相位信息。两路信号鉴相的相位差作为控制量,驱动磁控管调谐机械的步进电机的运动方向[5],调整磁控管的振荡频率直至鉴相的相位差回到所设置的要求范围内,相应地磁控管的频率也回到要求的初始值。
3 实施方案与结果
在本系统中,需要一只谐振腔,一般选用TE010模的驻波腔,其Q值越高频率控制精度会越高。谐振腔有输入输出两个端口,便于信号的联接。对2998MHz信号,本方案采用16位的ADC,I/Q鉴相技术的测量控制精度可以达到0.3°,图5是本方案的FPGA板卡,图6是相位测量的结果。

图5 用于鉴相的FPGA数字化板卡Fig.5 FPGA card for phase discrimination.
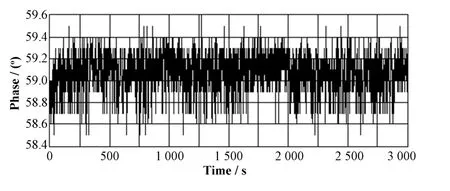
图6 信号相位的测量结果Fig.6 Phase measurement of RF signal.
系统需要一只高Q谐振腔,图7是一只无氧铜驻波谐振腔的相位-频率曲线,从图7中可以看出,输入谐振腔的信号频率偏离中心频率 25 kHz将使输出信号相位产生 10°的偏移,将曲线近似看作线性,可以推断知道该系统对频率的控制精度在750Hz。
在加速器调试时,借助标准信号源先将AFC进行初始化,将2 998 MHz的信号输入到AFC,将此时鉴相器的测量值置零,然后将磁控管输出的取样信号替换标准信号输入到AFC,当磁控管工作频率偏离2 998 MHz时,鉴相器的测量值将偏离零位置,AFC控制步进电机工作调整磁控管的工作频率,直致鉴相值回到零位,此时对应管子的工作频率为2998 MHz。机器调试中用频谱仪监测磁控管频率,磁控管的频率漂移将控制在1 kHz以内,满足加速管对磁控管频率漂移小于500 kHz的要求。

图7 谐振腔的相位-频率曲线 (a) BW=3 MHz,(b) BW=0.1 MHzFig.7 Phase vs. frequency curve of cavity. (a) BW=3 MHz, (b) BW=0.1 MHz
4 结语
本文阐述了采用高分辨率的数字化I/Q鉴相技术实现磁控管频率控制方法,与传统采用粗调、细调两个反馈环路控制的传统AFC模拟系统相比,该项技术的频率控制精度达到1 kHz以内,优于前者几十kHz的精度,更好地满足了加速器束流能量稳定性要求。整个AFC系统结构简单,实现模块化加工,安装与调试也变得简单方便,FPGA板卡是AFC的核心部件,随着FPGA板卡的广泛运用,其售价不断降低,该方案AFC的工程造价也变得可行。
1 赵明华, 林国强, 钟少鹏, 等. 上海光源直线加速器初步设计报告[R]. 上海: 中国科学院上海应用物理研究所, 2004 ZHAO Minghua, LIN Guoqiang, ZHONG Shaopeng, et al. Preliminary design report of SSRF linac[R]. Shanghai:Institute of Applied Physics, Chinese Academy of Sciences, 2004
2 赵玉彬. 高频低电平控制和高频直接反馈[D]. 博士论文. 中国科学院上海应用物理研究所, 2008: 11 ZHAO Yubin. High-frequency and high-frequency low-level control direct feedback[D]. PhD Thesis.Shanghai Institute of Applied Physics, Chinese Academy of Sciences, 2008: 11
3 刘一蕾, 王光伟, 王芳. I/Q方法用于高频信号鉴相[J].高能物理与核物理, 2006, 30(8): 780−783 LIU Yilei, WANG Guangwei, WANG Fang. I/Q phase method for high-frequency signal[J]. High Energy Physics and Nuclear Physics, 2006, 30(8): 780−783
4 张俊强, 殷重先, 高永强, 等. FPGA实现次谐波聚束器的幅相控制[J]. 核技术, 2012, 35(7): 499−502 ZHANG Junqiang, YIN Chongxian, GAO Yongqiang, et al. An FPGA-based amplitude and phase control of sub-harmonic buncher[J]. Nuclear Techniques, 2012,35(7): 499−502
5 张瑞, 赵玉彬, 付泽川, 等. 数字化 LLRF频调环路的步进电机控制算法设计[J]. 核技术, 2010, 33(8):571−574 ZHANG Rui, ZHAO Yubin, FU Zechuan, et al. Design of an algorithm for stepper motor control in frequency tuned loop of digital LLRF[J]. Nuclear Techniques, 2010, 33(8):571−574
