高频非对称EMCCD增益驱动电路设计
2015-12-02赖积斌任国强王明富廖育富
赖积斌++任国强+王明富++廖育富
摘 要: 自适应光学系统的发展,对波前传感器中的电子倍增CCD的工作频率提出了更高的要求;而目前所设计的电子倍增CCD增益驱动电路工作频率普遍不高,且稳定性不好,驱动波形变形严重。针对E2V公司的产品CCD220对增益驱动电路的要求,将传统图腾柱法的对称结构改为非对称,设计了一种频率高达40 MHz,且波形稳定性较好的方波增益驱动电路。利用Cadence对电路进行了PSpice仿真,证明了设计的可行性。
关键词: 电子倍增CCD; 工作频率; 波形稳定性; CCD220; 非对称结构
中图分类号: TN710?34; TP391.4 文献标识码: A 文章编号: 1004?373X(2015)22?0111?04
0 引 言
20世纪50年代,为了解决动态像差扰动问题,提出了自适应光学的概念,指出利用测量和矫正的方法克服这种动态扰动像差的设想。
一般的自适应光学系统[1]中包括三个基本组成部分:波前传感器,波前控制器和波前矫正器。波前传感器是自适应光学系统的重要组成部分,系统的控制信号的产生以及对波前畸变的实时矫正,都要依赖于波前传感器。波前传感器主要由微透镜阵列和CCD两部分构成。在各种电荷耦合器件(Charge Couple Device,CCD)中,近年来又发展出一种电子倍增电荷耦合器件(Electronic Multiplying CCD,EMCCD)应用于波前传感器。其噪声小、速度快和使信号倍增的特点能让波前传感器在微弱光下也能很好的工作。而要想使EMCCD有效工作,其增益驱动电路是重中之重。
增益驱动电路有两种实现方法:方波法和正弦波法。因为方波法易实现且时序编程可调,受噪声影响小等优点而应用普遍。但是目前方波法增益驱动电路设计其允许的工作频率不够高,只能达到20 MHz左右,且波形变形严重,无法很好的满足今后对增益驱动信号高频率高稳定性的需求,为此需要对更高频率的驱动电路设计进行研究。
1 EMCCD原理及CCD220特性
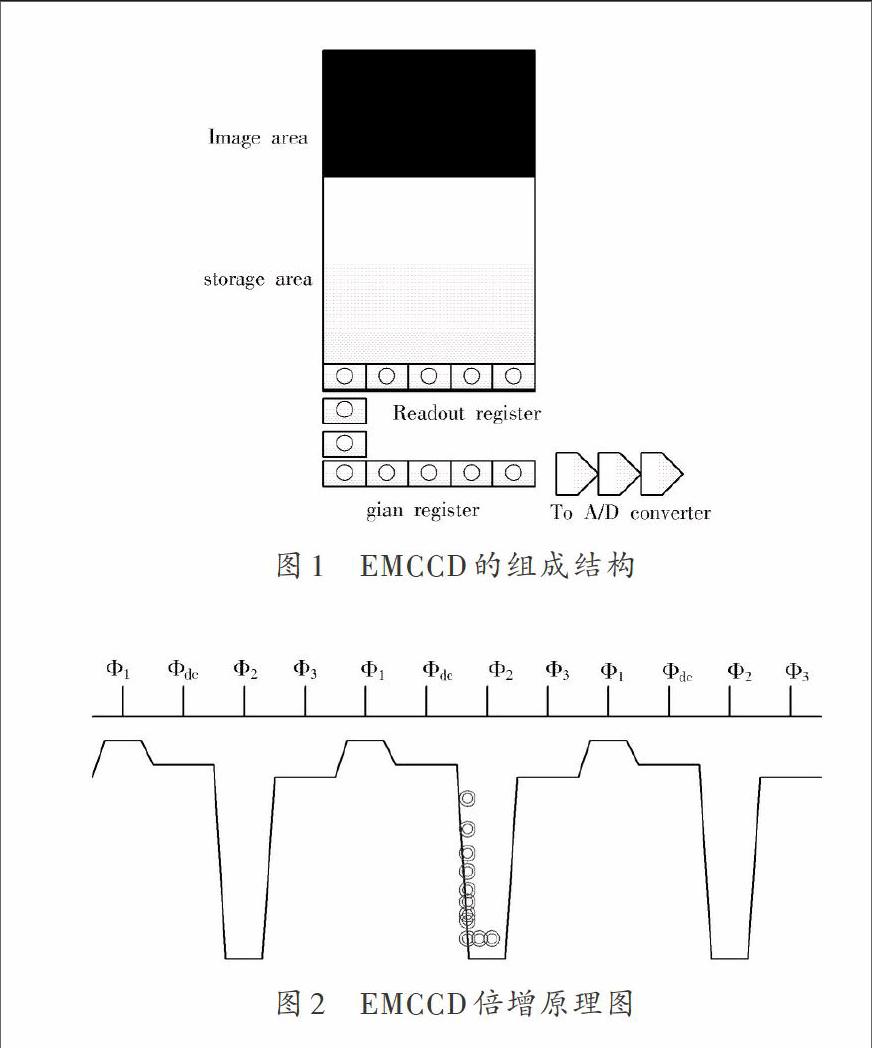
EMCCD成像器件结构是由图1所示[2]组成的:产生信号电荷的成像区,存储电荷的存储区,以及接收电荷的输出寄存器,再从输出寄存器转移到独立的倍增寄存器,以及在倍增寄存器元件中通过高压电场转移电荷时获得倍增的方法和倍增寄存器后的读出放大电路。
如图2所示,倍增寄存器中信号电荷的倍增[3]是因为在高压电场的作用下,被加速成为“热载流子”,然后在受控电极之间进行转移时发生碰撞电离,得到了更多的载流子。每次转移的电荷倍增值很低,一般为1%,但由于实际要求有多次转移,所以信号的总增益比较大。
实现倍增所需的高压电场是在倍增寄存器中由相邻电极间大电位差形成的[4]。Ф2加上40~50 V的高幅值时钟脉冲,而Фdc保持低直流偏压,一般取作4 V。其余两个电极都有典型幅值为10 V的标准时钟脉冲。Ф2的高电平与直流偏压之间的电位差决定了高压电场的强度,从而调控倍增因子。为了调整倍增因子,可以调节高幅值脉冲的高电平或直流偏压。但一般而言,由于Фdc的值不能过小以免过剩电荷溢出,因此为了调整倍增因子,可以调节高幅值脉冲的高电平。
CCD220特性:通过查询CCD220的datasheet可知,增益驱动信号的频率至少要达到13.6 MHz,可以提高到15 MHz或更高;高压电源最低20 V,平均45 V,最高50 V;低压电源最低-2 V,平均4 V,最高5 V;方波驱动信号的上升沿和下降沿时间要低于25 ns;方波时序要求如图3所示,RФ2HV要在RФ1变成低电平之前达到高电平;由电压与增益倍数的关系可知,要想在放大倍数为1 000时,保持倍数波动在5%以内,则增益电压需要稳定在正负30 mV以内;倍增寄存器是容性负载,电容为107 pF,输入电阻为5 Ω。
2 增益驱动电路
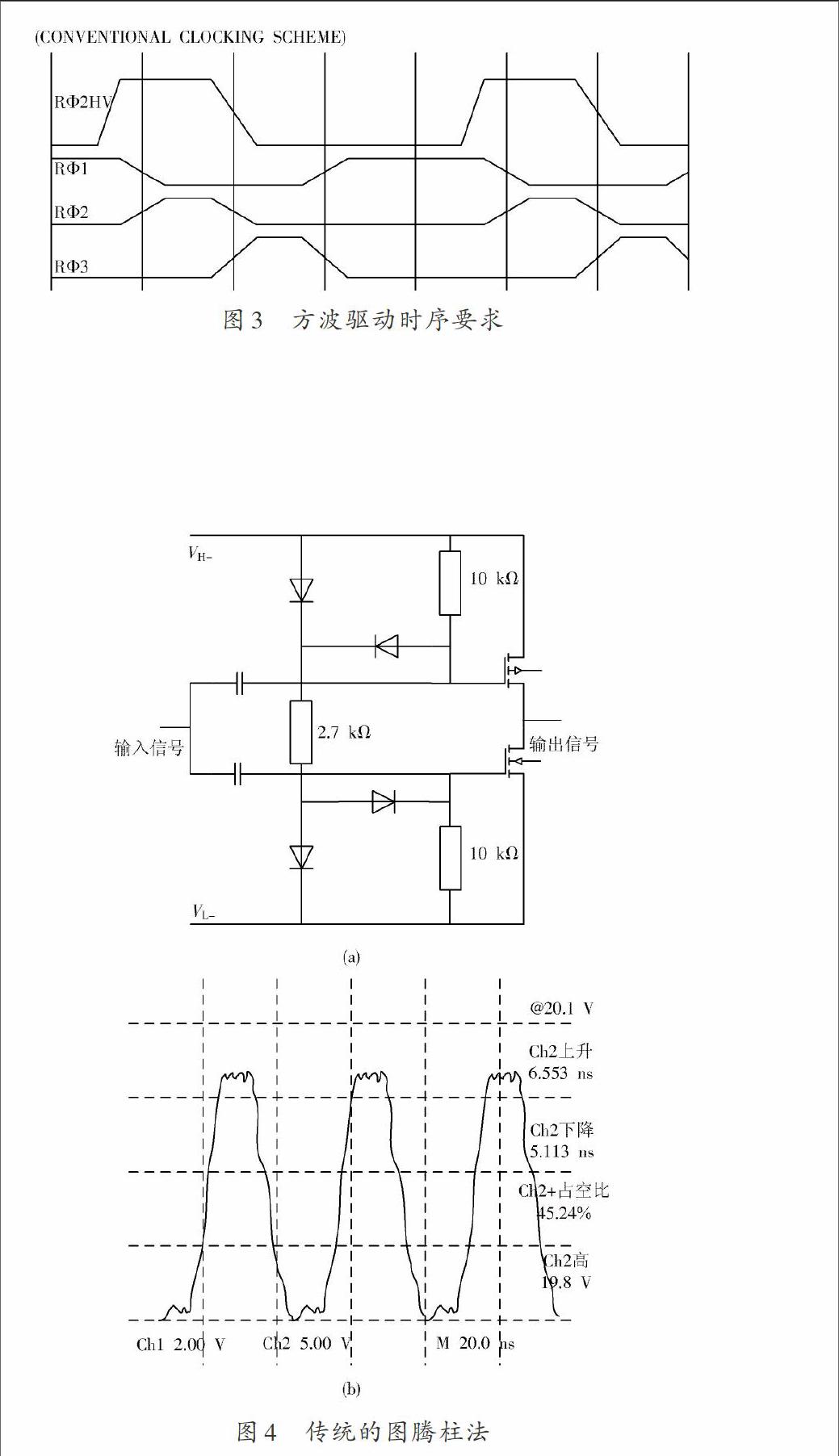
传统的方波驱动电路设计是用图腾柱法[5],采用具有参数对称的MOS管[6]。如图4所示,其原理为输入时钟驱动信号驱动MOS管,当输入时钟信号由高变低时,MOS管栅源电压变低,使得PMOS管导通,NMOS管截止,输出高电压[7]VH+;当输入时钟信号由低变高时,MOS管栅源电压变高,使得NMOS管导通,PMOS管截止,输出低电压[8]VL-;NMOS管和PMOS管这样交替导通,使得输出信号类似方波一样高低变化,以驱动EMCCD倍增寄存器实现电子倍增的功能。
图4是所查文献中利用对称管TP2104和TN2106设计的驱动电路[9],及其输出波形。可以看出在20 MHz时,所得波形不好,抖动非常厉害。
通过研究发现,影响驱动电路工作频率的因素在于MOS管的参数及其外围电路的设计。MOS的参数需要考虑的主要是较大的耐压VDS,较小的VGS(th),RDS(on),Ciss-Crss,tr,ton(delay),tf,toff(delay);外围电路需要考虑的主要是驱动MOS管的电压和电流应较大。
查询datasheet可知,虽然TP2104和TN2106的其他参数较好,但由于Ciss-Crss较大,MOS管的开关能力不强[10],因此无法做到很高的频率。发现对称的MOS管参数无法做到全部符合要求,主要是P管在起制约作用,鉴于此,提出了一种前人没有用过的方法,即选择非对称MOS管来设计电路,这样就可以分开选择P管和N管,使两管的参数都能较好地满足需求。将MOS管参数拟定在VDS为±60 V以上,较小的VGS(th),RDS(on)<5 Ω,Ciss-Crss<20 pF,tr+ton(delay)<20 ns,tf+toff(delay)<40 ns,设计了一种频率高达40 MHz,稳定度非常好的方波增益驱动电路。
3 仿真验证
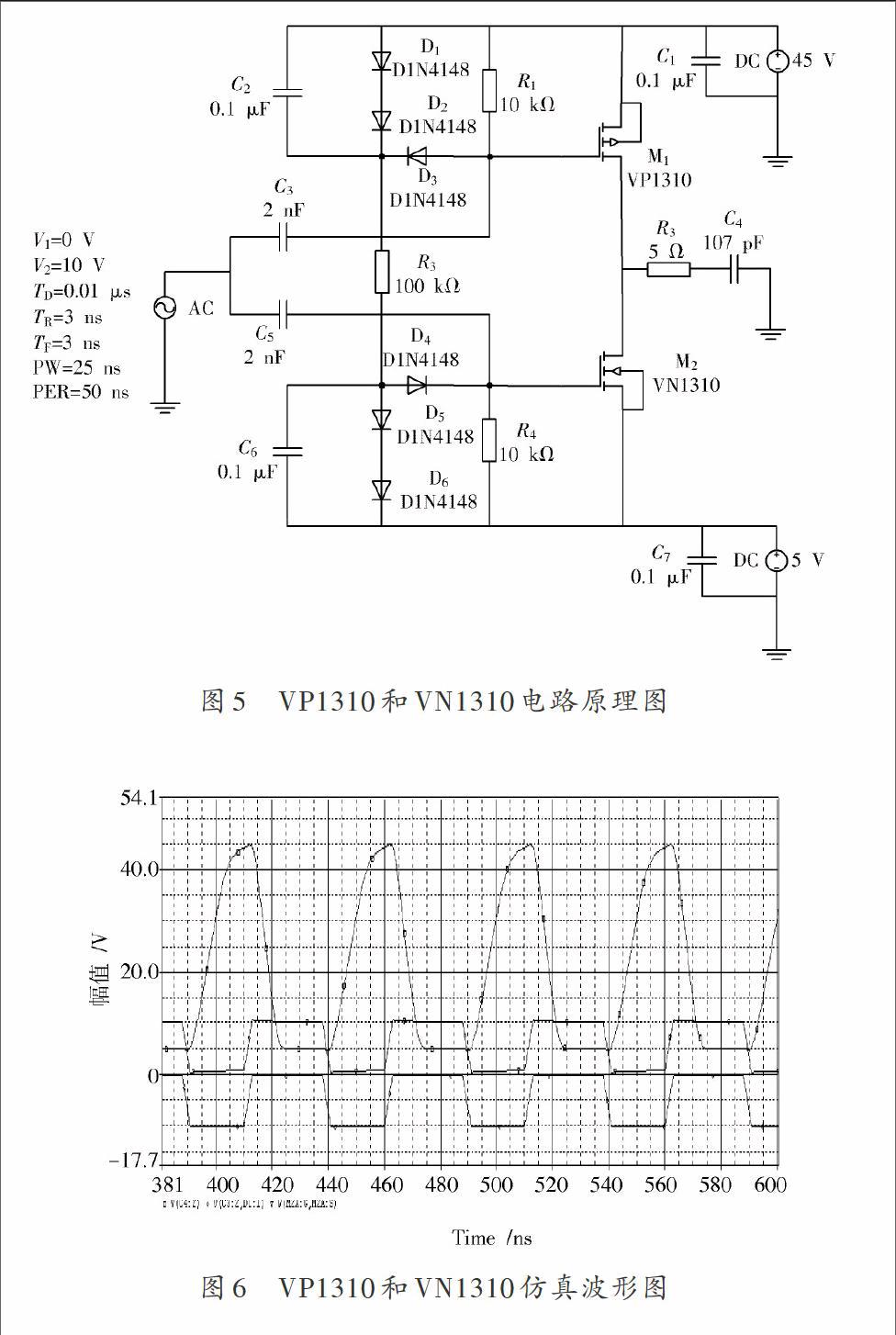
利用Cadence中的Orcad Capture CIS画原理图和PSpice做仿真,通过筛选和对比,首先选择对称管VP1310和VN1310做仿真,其电路图和仿真波形如图5和图6所示。可以看出其在20 MHz频率时,波形并不好,高压处过于尖锐,无法满足稳定性要求。分析原因可知,虽然VP1310和VN1310的其他参数都很好,但是VP1310的RDS(on)较大,达到了19 Ω,使得给容性负载的充电时间过长,无法在短时间内充好电稳定在高压。
然后选择对称管ZVP2106和ZVN2106做仿真,其仿真波形如图7所示,可以看出其在20 MHz频率时,波形变形严重,无法使用。分析原因可知,虽然ZVP2106和ZVN2106的其他参数都很好,但是它们Ciss-Crss的较大,高于55 pF,使得MOS管的开通时间过长,无法在短时间内开通。ZVP3306和ZVN3306,ZVP3310和ZVN3310,ZVP4424和ZVN4424的情况类似。
因此最终决定选择参数非对称的MOS管TP0610和VN2001设计电路,其各方面参数都比较好,电路图见图8。
第一次将工作频率设定为30 MHz,其输出波形如图9所示,可以看出其上升沿和下降沿都非常陡,在10 ns以内,在保持高电平和低电平期间电压也无明显的变化,波形稳定性较好,而且还有提升频率的潜能。
第二次将工作频率设定为40 MHz,其输出波形如图10所示,虽然波形变差了一些,但还是能够满足CCD220的要求,证明了非对称法设计电路的可行性。TP0610和VN1310,TP0610和VN0120也能做到30 MHz,但在各部分参数对比下,它们并没有VN2001好。
4 结 语
本文从提升EMCCD方波法增益驱动电路的工作频率出发,介绍了EMCCD的结构特点和倍增原理及CCD220的特性。分析了传统图腾柱法增益驱动电路的工作原理,指出前级驱动电路的输入电压和电流及MOS管本身的参数决定了驱动电路的工作频率上限。鉴于P管是影响电路性能的主要因素,因此提出了一种新的方法,即选择非对称管设计电路,根据参数选择要求,利用Cadence中的Orcad Capture CIS画原理图和PSpice做仿真,先后验证了在电路中使用对称管和非对称管后,得到的波形图。对比后得知,利用非对称结构可以设计出频率高达40 MHz,波形稳定性较好的电子倍增CCD增益驱动电路,为今后EMCCD方波法增益驱动电路更高的工作频率设计提供了有用的参考。下一步将画PCB板,制版完成后进行实验验证。
参考文献
[1] 张艳艳,饶长辉,马晓燠,等.基于电子倍增电荷耦合器件的哈特曼?夏克波前传感器质心探测误差分析[J].物理学报,2010,59(8):5?6.
[2] 余达,刘金国,郭永飞,等.微光EMCCD超高速成像研究进展[J].科学通报,2013,58(36):131?133.
[3] 韩露,熊平.EMCCD工作原理及性能分析[J].传感器世界,2009(5):24?28.
[4] 何家维,何昕,魏仲慧,等.电子倍增CCD星相机的设计[J].光学精密工程,2010,18(6):1396?1403.
[5] 黄强强.EMCCD驱动电路设计与优化[D].南京:南京理工大学,2014.
[6] 包尔恒.MOSFET驱动电路分析与设计[J].通信电源技术,2013,30(2):34?37.
[7] 白玉栋,张守才.电子倍增CCD驱动电路设计[J].光电技术应用,2013,28(3):51?54.
[8] 谢宗宝,张涛,张晶晶.空间EMCCD成像系统中倍增高压时钟驱动设计[J].科学技术与工程,2011,11(17) 3945?3950.
[9] 金建辉,李彬华,陈小明.EMCCD电荷倍增驱动电路分析与PCB设计[J].天文研究与技术,2012,9(3):316?322.
[10] 张元敏,方波,蔡子亮.实际应用条件下Power MOSFET开关特性研究(上)[J].现代电子技术,2007,30(21):175?178.
