PMSM伺服系统速度环PI控制器参数自整定及优化
2014-09-20肖启明杨明刘可述贾下跖秦洁
肖启明, 杨明, 刘可述, 贾下跖, 秦洁
(1.重庆三峡学院 机械工程学院,重庆 400410;2.哈尔滨工业大学电气工程系,黑龙江 哈尔滨 150001;3.中船重工集团第七○七研究所九江分部,江西九江 332000;4.中电投江西核电有限公司,江西九江 332000)
0 引言
在伺服系统中,系统参数变化(如负载转矩或转动惯量的变化)可能会严重影响系统的控制效果,导致系统动态响应性能恶化甚至产生振荡[1]。为了保证在伺服系统参数发生变化后,伺服系统仍具有良好的动静态性能,需对控制器参数进行自整定。
按照工作机理可以将PI参数自整定方法分为两大类:基于模型的PI参数自整定和基于规则的PI参数自整定[2-5]。基于模型的PI参数自整定是基于系统的精确数学模型和一些假设条件,根据系统的响应性能指标按传统控制理论对PI参数进行直接配置,如Ziegler-Nichols(Z-N)整定法、继电器反馈整定法等。文献[6]提出了一种改进型Z-N整定法,其以提高系统瞬态响应性能为依据,根据系统当前过程变化趋势对系统速度环PI参数进行整定;文献[7]则以系统数学模型为基础,通过系统期望截止频率和相角裕度来对控制参数直接配置。这类方法依赖系统模型的建模精度和假设条件的合理行,且过于复杂。基于规则的PI参数自整定则是以伺服系统的实际控制效果作为依据,通过对系统阶跃响应进行评价的评价函数和参数优化准则来获得PI参数最优值。文献[8]提出了一种将坐标轮换法和评价函数IITAE结合的算法来整定PI控制参数。这类方法的难点在于参数优化准则的确定以及存在优化过程长的问题。
本文提出了一种将基于模型和规则的PI参数自整定思想相结合的参数自整定策略。首先在系统精确数学模型的基础上利用系统的开环截止频率和相角裕度等频域性能指标来获得一组PI参数(KpsJ,KisJ),然后以ITAE为评价函数和参数(KpsJ,KisJ)为初始值,利用二自由度迭代法在微小范围内通过对不同PI参数下系统阶跃响应进行评价,根据最小ITAE值寻找系统的最佳PI参数(KpsJ(n),KisJ(n)),从而使系统获得最佳的动静态性能。
1 基于频域法的速度环PI参数设计
因为在实际系统中,电流环的带宽远远高于速度环的期望截止频率,所以可以将电流环的闭环传递函数等效为单位增益的惯性环节。则速度环的结构框图如图1所示。
其中,速度调节器采用PI控制器,其传递函数为

式中,Kps、Kis分别为速度PI控制器的比例增益、积分时间常数。

图1 速度环结构控制框图Fig.1 Block diagram for speed loop

式中:ωc为电流环带宽;ωfs为速度检测一阶低通滤波器的截止频率;P为极对数;ψf为永磁体磁链;J为转动惯量。
设定速度环开环截止频率和相角裕度分别为ωsc、ψsm,则速度环开环传递函数应满足式(3)和式(4)所示的幅相关系。
相频关系:

由图1可得速度环开环传递函数为
幅频关系:
通过上述幅相关系可求解出速度PI控制器参数:
速度PI控制器比例增益

速度PI控制器积分时间常数
在参数设计过程中,为了降低算法的复杂性而引入控制系数

在截止频率ωsc处,PI控制器对整个伺服系统所提供的滞后相角θPI由系数u决定,

当系数u取值不同时,PI控制器对伺服系统造成的相角滞后不同,进而也就决定了系统的相角裕度不同。为了使系统在截止频率处相角裕度达到最大值,控制系数u应满足

由式(5)和式(7)联立可求解出速度PI控制器参数关于控制系数u的表达式

在伺服系统中,若满足电流环带宽ωc远远高于速度环截止频率ωsc,速度检测低通滤波器的截止频率ωfs远远高于速度环截止频率ωsc,即有

成立。
可以得到简化后的速度环PI控制参数为

图3 所示是二自由度迭代整定法参数优化流程图。具体优化过程如下:
为了使经过PI控制器校正后的系统具有较大的相角裕度,本文中选取控制系数u为5,则速度环PI控制参数最终为

由于文献[9-10]提出了简单有效、辨识精确度高的负载转动惯量辨识算法,本文将直接引用其成果。通过式(14)和辨识到的负载转动惯量比(负载惯量与电机本体惯量的比值)KJ可获得对应转动惯量的速度环PI控制器参数。

2 基于二自由度迭代整定法的速度环PI参数优化
由于在实际系统中,不可避免的存在转矩脉动、摩擦和系统离散化等影响,基于频域法设计的速度环PI参数不一定能使伺服系统具有最佳控制性能,所以需对设计的参数进一步优化。
所提出的二自由度迭代整定法以ITAE为评价函数和频域法设计的速度环PI参数(KpsJ,KisJ)为初始值,在初始值的附近通过对不同PI参数下系统阶跃响应进行评价,根据最小ITAE值寻找系统的最佳PI控制器参数。图2所示是基于二自由度迭代整定法的伺服系统参数整定框图。

图2 二自由度迭代整定法的伺服系统参数整定框图Fig.2 Block diagram for two-degrees-freedom iteration method
1)以频域法设计的PI参数(KpsJ,KisJ)为参数优化的基点,(ΔKps,ΔKis)为参数增量,确定一组测试参数(Kps,Kis);
2)给定如图4所示的速度阶跃指令,计算不同测试参数下系统性能响应的评价函数值FITAE,其中

3)将最小评价函数值FITAEmin对应的参数作为新的测试基点(Kps(n),Kis(n))并确定新的测试参数,重复2)、3)两步的测试;
4)直到两组测试参数的基点相同,即满足式(15)时,则认为迭代过程完成,优化参数为(Kps(n),Kis(n))。

其中,步骤1)中的测试参数按下式确定

图3 二自由度迭代整定法参数优化流程图Fig.3 Parameters optimization flow chart for 2DOF

图4 速度阶跃周期指令Fig.4 Speed step instruction

图5 二自由度迭代整定法的PI参数优化轨迹Fig.5 PI parameters optimization trajectory of 2DOF
3 实验结果与分析
实验平台采用的永磁同步交流伺服系统主要性进

图6 光轴时优化前后3 000 r/min阶跃响应Fig.6 Speed step response with one times load inertia ratio

图7 5倍负载惯量时3 000 r/min阶跃响应Fig.7 Speed step response with 5 times load inertia ratio

图8 20倍负载惯量时3 000 r/min阶跃响应Fig.8 Speed step response with 20 times load inertia ratio
一步整理出不同负载惯量下,系统默认参数、优化前后参数的伺服系统阶跃性能指标如表1所示。

表1 不同负载惯量时伺服系统阶跃性能指标Table 1 Performance index of speed step response with different times load inertia ratio
由表1数据可知,基于频率法的理论参数已经能使伺服系统具有较好的响应性能;经过2DOF整定法优化后,伺服系统响应性能又有了大幅度提高:超调量明显减小,调节时间明显缩短。
图9所示为在额定负载时,伺服系统在理论参数和迭代优化后参数下的3 000 r/min阶跃响应和电流响应波形。图10所示为加载测试平台,加载系统(加载驱动器和电机)使用的是日系安川Σ5驱动器,整个加载测试平台的惯量比为5。由图9分析可知,在带额定负载启动时,采用2 DOF迭代优化后的参数比频域法设计参数具有更好的系统动静态性能。

图9 额定负载下系统3 000 r/min阶跃响应Fig.9 Speed step response with rated load

图10 加载测试平台Fig.10 Loading test platform
图11所示为伺服系统稳速3 000 r/min时突加突卸额定负载时的转速波动。测试平台仍采用图10所示平台。表2总结了在突加突卸额定负载时的系统转速降落值,由表分析可知,采用2DOF迭代优化后的参数要比频率法设计参数具有更好的抗负载扰动性。

图11 突加突卸额定负载时的转速波动曲线Fig.11 Speed fluctuation when loading and unloading rated load
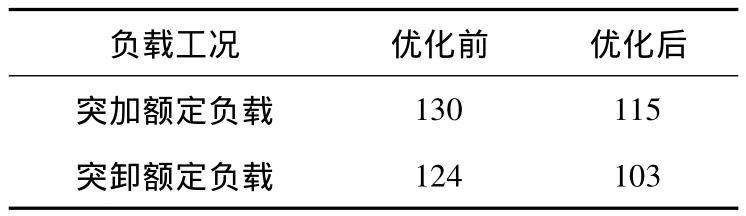
表2 突加突卸额定负载的转速波动值Table 2 Speed fluctuation when loading and unloading rated loadr/min
4 结论
本文提出了一种新颖的PMSM伺服系统速度环参数自整定及优化方法,利用频域法设计一组速度PI控制器参数,然后以该PI参数为初始值、ITAE为阶跃响应的评价函数,通过2DOF整定法在初始值附近搜索使系统工作于最佳控制性能的PI参数值。该方法的特点在于通过频域法设计的速度环PI参数已经使系统处于较佳控制性能,从而减少了2DOF的迭代步骤和时间。实验结果证明,通过该方法整定得到的速度环PI参数能使伺服系统具有良好的动态跟踪性能和较强的负载抗扰性。
[1]秦忆.现代交流伺服系统[M].武汉:华中理工大学出版社,1995.
[2]CHEN Y Q,MOORE K L.Relay feedback tuning of robust PID Controllers with iso-damping property[J].IEEE Transactions on Systems,Man and Cybernetics-Part B:Cybernetics,2005,35(1):23-31.
[3]ASTROM K J,HIGGLUND T.Automatic tuning of simple regulators with specifications on phase and amplitude margins[J].Automatica,1984,20:645-651.
[4]TURSINI M,ZHANG D Q.Real-Time gain tuning of pi controllers for high-performance PMSM drives[J].IEEE Transactions on Industry Applications,2002,38(4):1018-1019.
[5]WANG MingShyan,SHAU TzuChang,CHANG ChiaMing.DSP based auto tuning design of permanent magnet synchronous motor drives[C]//The 33rdAnnual Conference of the IEEE Industrial Electronics Society.Taiwan,2007:1044-1048.
[6]MUDI Rajani K,DEY Chanchal,LEE TsuTian.An improved aotu-tuning scheme for PI controllers[J].ISA Transaction,2007,47(1):45-52.
[7]LIDOZZI A,SOLERO L,CRESCIMBINI F.Direct Tuning Strategy for Speed Controlled PMSM Drives[C].IEEE International Symposium on Industrial Electronics,Italy 2008:1265-1270.
[8]陈鹏展,唐小奇,任清荣.基于IITAE评价指标的交流伺服系统参数自动整定研究[J].微电机,2010,43(2):70-73.
CHEN Pengzhan,TANG Xiaoqi,REN Qingrong.Study on an parameters auto-tuning methods of AC servo system of IITAE evaluation indicators[J].Micromotors,2010,43(2):70-73.
[9]杨明,张扬,曹何金生,等.交流伺服系统控制器参数自整定及优化[J].电机与控制学报,2010,14(12):29-34.
YANG Ming,ZHANG Yang,CAO Hejinsheng,et al.Gain selftuning of PI controller and parameter optimum for PMSM drives[J].Electric Machines and Control,2010,14(12):29-34.
[10]杨明,高扬,于泳,等.基于迭代学习控制的交流伺服系统PI参数自整定[J].电机与控制学报,2005,9(6):588-592.
YANG Ming,GAO Yang,YU Yong,et al.On-line self-tuning of PI controller for PMSM drives based on the iterative learning control[J].Electric Machines and Control,2005,9(6):588-592.
