有限长迭代学习控制及在扫描光刻中的应用
2014-09-20姜晓明陈兴林
姜晓明, 陈兴林
(哈尔滨工业大学控制科学与工程系,黑龙江哈尔滨 150001)
0 引言
步进扫描式光刻机[1-2]是半导体制造的主要生产设备。在严格工艺下缩短扫描光刻的预扫描时间对提高系统产率尤为重要。受机械谐振的影响,无法显著提高系统的带宽,因此也难以改善系统的动态性能。基于扫描曝光过程的重复性,将迭代学习控制用于扫描光刻系统中。
迭代学习控制[3-5]在光刻设备中已有应用,最初其被应用于步进式光刻机,例如文献[6]采用鲁棒综合的迭代学习控制律来改善硅片台的步进性能。文献[7]通过迭代学习控制来消除系统在步进运动后的残留振动。然而上述方法对扫描式光刻系统来说缺少针对性。HEERTJES M等[8]提出一种非线性迭代学习控制方法,以扫描性能指标为阈值进行切换控制,使之一直趋向阈值,但阈值的选取需要反复的尝试。文献[9]不需要设置阈值,直接采用分段方法,旨在消除扫描段的非重复性扰动,但在预扫描段的性能提升有限。此外,文献[10]通过时频分析方法来提高系统对非重复扫描轨迹的适用性。MISHRA S等[11]将基于投影方法的迭代学习控制应用于模拟的硅片台系统。上述方法存在如下缺陷:1)迭代过程存在大量的矩阵运算,而且扫描周期越长,运算量越大;2)在提高系统的性能和改善方法的鲁棒性之间难以兼顾;3)在预扫描区间的分段学习控制容易影响系统的动态性能。
针对上述问题,首先给出硅片台在扫描光刻中的运动模型和扫描轨迹;然后基于名义系统的优化指标提取有效学习系数,得到基于有限长脉冲响应的学习控制律,并对其收敛性和鲁棒性进行分析;最后将该方法应用于实验平台,采取扫描后期切换的学习控制策略来改善系统的扫描性能。
1 扫描式光刻系统
1.1 硅片台系统
扫描光刻系统包括硅片台和掩模台子系统,在扫描光刻过程中,两个子系统分别沿不同的轨迹进行运动。以硅片台的微动台为例进行说明,微动台是一个六自由度的气浮运动平台,其受力分布如图1所示,执行机构由3组线圈组成的平面电机以及3个垂向的重力补偿器组成。这里考虑系统的平面运动,此时忽略垂向运动对平面运动的影响[1]。将微动台重心的受力转化到平面电机上,若O为微动台的几何中心,平面电机的三组线圈分别按等边三角形进行排列,出力分别为Fh1,Fh2,Fh3。重心的受力分别为沿Xc轴步进方向的受力Fxc、沿Yc轴扫描方向的受力Fyc,以及沿旋转方向的力矩Tzc,令 α为Fh1与Yc轴的夹角,则平面受力关系为


图1 微动台受力情况Fig.1 Forces of the micro motion stage

式中:
其中:m为微动台的质量;Jz为微动台的转动惯量;x,y,θ为重心坐标系下的位置和转角。通过上述运动关系可以得到系统的解耦控制框图,如图2所示。

图2 控制框图Fig.2 Control diagram
图中通过对微动台进行几何解耦,将其分解到3个单入单出的运动模型上,在此基础上可以提取微动台在扫描方向上的运动模型,即从扫描方向位置指令ry到扫描方向位置输出y的控制回路。限于实验条件,本文直接采用单自由度实验平台来实现扫描方向上的运动。为充分模拟扫描光刻过程,实验平台采用无铁心永磁同步电机来代替平面电机,两者的力矩扰动水平相当;同时实验平台采用气浮支撑结构。由于平台采用单执行机构,负载质量(5.5 kg)约为微动台质量(15 kg)的1/3。上述设计使实验平台可以近似模拟系统的扫描光刻过程。
1.2 扫描轨迹
扫描光刻系统的性能指标包括:与扫描误差相关的移动平均值(SMA)、移动标准差(SMSD)以及调节时间。在t时刻的SMA和SMSD描述为式中:e(t)表示误差;Ts表示扫描一个狭缝所需的时间。若狭缝的宽度为slit,扫描的速度为v,则Ts为


调节时间与SMA、SMSD相关,是SMA和SMSD满足指标要求时的预扫描时间。为了改善系统的动态跟踪性能,缓解加减速过程对系统的冲击,采用时间优化的方法进行扫描轨迹的规划,硅片台的扫描轨迹如图3所示。图中0~t1区间表示系统的加速过程;t1~t2区间表示系统的预扫描阶段,在该阶段,SMA和SMSD指标逐渐收敛至曝光所需的精度要求;t2~t4区间为系统的扫描光刻阶段;扫描结束后,硅片台从t4时刻开始减速,并进行反向加速,接着重复上述过程。图中t5、t6、t8时刻与t1、t2、t4的定义相同。硅片台的扫描轨迹为一个往复运动轨迹,这与光刻的工艺和效率有关[1],下面将围绕着扫描运动来展开。

图3 扫描轨迹Fig.3 Scan trajectory
2 有限长迭代学习控制
2.1 迭代学习控制
根据1.1节的分析,将硅片台系统进行解耦,得到系统在扫描方向上的运动模型为

式中:A,B,C,D为系统的状态阵,系统的初始状态为0;u为系统在扫描方向上的期望控制量;y为系统在扫描方向上的位置输出。若采样周期为tn,则在有限时间段0~ntn内,系统的时域表达形式为

式中:Y=[y(0)y(1)…y(n)]T;U=[u(0)u(1)…u(n)]T。若参考输入为R,则跟踪误差为E=RY,基于二次型名义性能指标的优化问题为

式中:加权矩阵We=α1I;Wd=α2I,Ei为第i步迭代周期的跟踪误差;ΔU=Ui+1-Ui,Ui为第i步迭代周期的控制量。利用优化理论=0可以得到优化迭代学习控制律,其表达形式为式中,L为优化学习控制律的时域描述。

上述优化迭代学习控制律[12]被广泛应用。但在应用时会出现以下问题:1)学习控制律是针对精确模型的,对其鲁棒性讨论较少;2)学习控制律依赖于运动周期的长短,导致运动周期越长计算量越大,进而采样时间变长,影响系统的实时性,所以学习控制律(9)更多地被用于实时性和性能要求不高的过程控制领域[13]。针对扫描光刻系统,为克服上述缺陷,提出一种基于有限长脉冲响应的迭代学习控制律,将在下一节展开。
2.2 有限长迭代学习控制
采用图4所示的闭环迭代学习控制框架,图中P为被控对象,K为反馈控制器,Lf为待求取的学习控制律,R为给定轨迹,Ei为第i步迭代的误差,Ui为第i步迭代的控制量,Yi+1为第i+1步迭代的输出。若采用T来描述由P和K构成的反馈控制系统的时域描述,则闭环迭代学习控制律为式中:T为闭环系统的Markov矩阵描述,T中的元素为系统的闭环系统脉冲响应系数。


图4 系统控制框架Fig.4 Control diagram for the system
有限长迭代学习控制是对优化学习控制律(10)的一个有效截短。不妨令学习控制律(10)的矩阵描述为

式中:g1…gn为Markov系数;ntn为系统的扫描周期。上述学习律可以通过完整的闭环系统脉冲响应系数来获得,这一过程直接借助于实验数据而非精确的系统描述。同时,式(11)描述的是一个高维矩阵,在实施过程计算量较大,影响系统的实时性。现在期望得到一个基于有限长脉冲响应的数字滤波器Lf(z)来取代学习控制律(11)。这里,为充分反映学习控制律的非因果性,采用非因果的数字滤波器来描述,见定义1。
定义1截短的非因果迭代学习控制律描述为

式中,gi来自于学习控制律(11),学习控制律的非因果部分和因果部分的阶次都为n1,n1<n。这样会在很大程度上方便优化迭代学习控制律的实施,提高系统的实时性。有限长迭代学习控制律的收敛性分析如定理1。
定理1对于式(6)描述的系统,采用有限长迭代学习控制律(12),学习控制系统是收敛的。
证明:假设系统存在一个n1tn的扫描周期,那么在0~n1tn内描述的迭代学习控制律与式(11)类似,此时学习控制律的维数为n1,描述为而对于扫描周期为n的系统而言,有限长迭代学习控制律(12)的矩阵描述为



其中,λ=‖T‖2,因此,式(11)描述的学习控制律是收敛的。由Toeplitz矩阵的性质可知

式中T1为与L1相匹配的Markov系统矩阵。
因此学习控制律(13)也是收敛的,最终有限长迭代学习控制律是收敛的。证毕
在有限长迭代学习控制律的基础上,采用文献[14]提出的分段学习控制思想来进一步提高系统的扫描性能。如图2所示,在匀速段分别选择t3和t7两个时刻,使得t3~t4(或t7~t8)之间的时间段长度等于n1tn,学习控制量分别保持t3和t8时刻的控制量,从而可以得到分段有限长迭代学习控制律。
2.3 有限长迭代学习控制的鲁棒性
由于六自由度运动系统的耦合作用以及系统自身机械谐振的影响,系统在扫描方向上存在一定的不确定性,因此有必要考察有限长迭代学习控制系统的鲁棒性。若将闭环系统描述为Tr=T+ΔT,ΔT为系统的不确定性,最终得到定理2。
定理2当系统的不确定性满足‖ΔT‖2<‖T‖2,则有限长学习控制律(12)使系统鲁棒收敛。
证明:对于扫描周期为ntn的系统,系统的鲁棒
L2的维数为n。
L2在0~n1tn的学习收敛性与itn~(n1+i)tn的收敛性一致。对于线性系统而言,要证明有限长迭代学习控制律的收敛性,只需证明迭代学习控制律(13)的收敛性。
分析完整扫描周期下的迭代学习控制律(11),由Ei=R-Yi可以得到

令We=α1I,Wd=α2I,α1,α2为非零正数,则收敛性条件为‖I-TrL‖2<1。
若令We=α1I,Wd=α2I进一步有

式中λ=‖T‖2。当‖ΔT‖2=0时,系统是收敛的;当‖ΔT‖2≠0时,令‖ΔT‖2<‖T‖2,则‖I-TrL‖2<1,学习控制系统是鲁棒收敛的。
由定理1可知,对于有限长迭代学习控制律而言,系统也是鲁棒收敛的。证毕
3 实验验证
根据第2节的描述,采用精密直线运动平台来模拟硅片台的扫描运动,如图5所示。试验平台安放在隔振平台上,采用气浮支撑,外接空气压缩机和过滤器,在5Bar的气压下正常工作。采用无铁心直线电机作为执行机构,并且采用高分辨率光栅尺作为测量传感器,控制系统还包括了工业控制计算机、电机驱动单元、运动控制板卡以及海德汉数据采集卡(对光栅尺的正余弦信号进行4096细分),学习控制算法在RTX实时系统下实施。
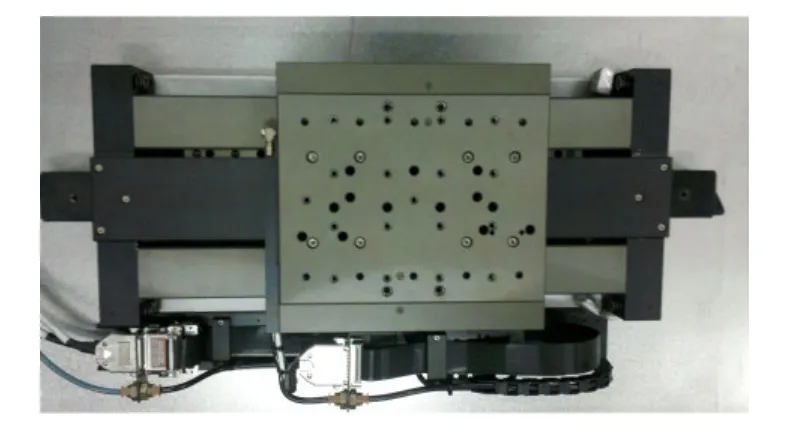
图5 气浮试验平台Fig.5 Air bearing test bench
3.1 有限长迭代学习控制
结合图4给出的系统控制框架,将有限长迭代学习控制律应用于上述试验平台。为描述方便,将该方法称为FILC(Finite Iterative Learning Control)。令系统采样频率为5 kHz,首先对反馈控制器K进行设计,采用PID控制来测试系统的闭环脉冲响应特性,具体设计参数见文献[15]。如图6所示,给出了系统在100 μm脉冲输入下的31组脉冲响应输出曲线。利用脉冲响应的均值可以提取名义系统的Markov系数,选择优化加权系数 α1=1,α2=1,可以计算得到迭代学习控制律(11)的有效学习系数,进一步选择有限长度n1=300,得到有限长学习控制律(12),阶次为601。限于篇幅,这里未给出学习控制律的具体描述。将FILC应用于试验平台,得到系统在时域下的跟踪误差曲线,如图7所示。

图6 输入为100 μm的脉冲响应Fig.6 Impulse response for 100 μm input

图7 应用FILC时的跟踪误差Fig.7 Tracking errors for FILC
图中第1步是指系统在单独反馈控制下的跟踪误差,第2步和第10步分别为系统在第2步和第10步迭代时的跟踪误差。图7还给出了系统在扫描结束段的误差局部放大,从中发现,随着学习控制律的实施,系统在临近减速时的性能发生了恶化。图8给出了系统跟踪误差的2范数沿迭代轴的变化特性,随着迭代周期的增加,跟踪误差的2范数逐渐收敛,说明有限长迭代学习控制律是收敛的。

图8 应用FILC时的误差2范数Fig.8 2 -norm of errors for FILC
3.2 分段有限长迭代学习控制
针对系统在匀速段后期性能部分恶化的现象,应用分段有限长迭代学习控制,将其称之为SFILC(Segment Finite Iterative Learning Control)。通过实验得到系统的跟踪误差曲线,如图9所示。图中各条曲线的意义与图7相同,此时,系统在匀速段的性能要优于直接应用FILC时的情形。系统的收敛特性如图10所示,跟踪误差的2范数随着迭代周期的增加而逐渐收敛。
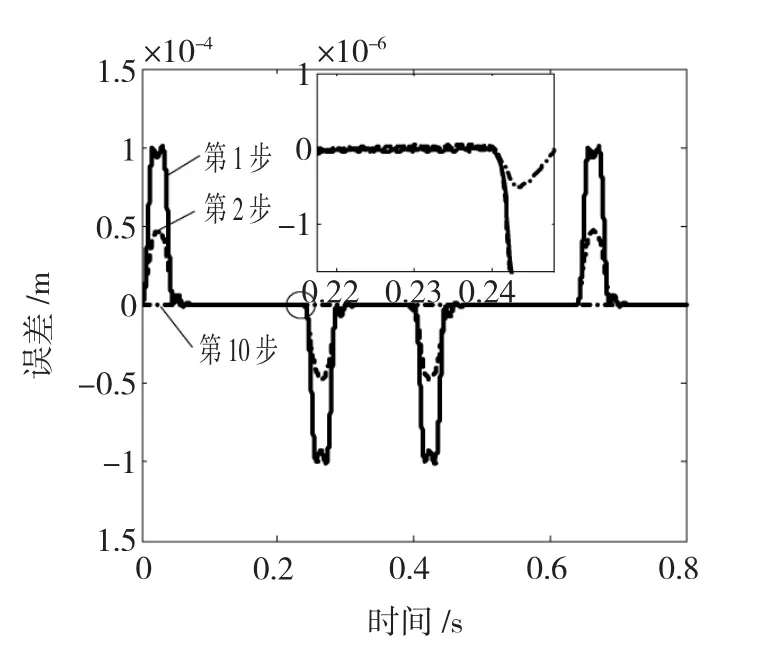
图9 应用SFILC时的跟踪误差Fig.9 Tracking errors for SFILC

图10 应用SFILC时误差的2范数Fig.10 2 -norm of errors for SFILC
进一步考察扫描光刻系统的统计特性,文中以曝光狭缝宽度10.5 mm,扫描速度150 mm/s为例,系统的统计指标如图11所示。与单独的反馈控制相比,系统在分段有限长迭代学习控制的作用下,SMA和SMSD得到了显著的改善。以SMA=20 nm,SMSD=60 nm作为曝光的性能指标,经过10步迭代,系统的预扫描时间从46.8 ms缩短至1.6 ms。

图11 系统的统计指标Fig.11 Statistical index of the system
3.3 鲁棒性验证
对有限长迭代学习控制系统的鲁棒性进行验证,系统的不确定性可以通过脉冲响应得以体现。如图12所示,分别给出了脉冲响应的上下界,它反映出系统存在一定的不确定性。利用系统的脉冲响应的平均值得到名义系统的矩阵描述T,同理可以得到系统不确定性的上下界ΔT1和ΔT2。进一步求得名义系统的范数‖T‖2=2.706 9,不确定性的范数‖ΔT1‖2=1.411 5,‖ΔT2‖2=1.401 6,由于‖ΔT1‖2<‖T‖2且‖ΔT2‖2< ‖T‖2,根据第2节的理论,系统是鲁棒收敛的。

图12 系统不确定性Fig.12 System uncertainty
4 结语
文中提出了一种基于有限长脉冲响应的迭代学习控制方法。该方法将系统名义指标下的优化迭代学习控制律转化为基于有限长脉冲响应的学习控制律,提高了系统在应用中的实时性。此外还讨论了有限长迭代学习控制律的收敛性和鲁棒性。最后将有限长迭代学习控制律应用于扫描光刻实验平台,实验结果表明该方法有效地减小了扫描光刻的预扫描时间。
[1]BUTLER H.Position control in lithographic equipment[J].IEEE Control Systems Magazine,2011,31(5):28-47.
[2]MARTINEZ V M,EDGAR T F.Control of lithography in semiconductor manufacturing[J].IEEE Control System Magazine,2006,26(6):46-55.
[3]ARIMOTO S,KAWAMURA S,MIYAZAKI F.Bettering operation of robots by learning[J].Journal of Robotic Systems,1984,1(2):123-140.
[4]BRISTOW D A,THARAYIL M,ALLEYNE A G.A survey of Iterative learning control[J].IEEE Control Systems Magazine,2006,26(3):96-114.
[5]张宏伟,余发山,卜旭辉,等.基于鲁棒迭代学习的永磁直线电机控制[J].电机与控制学报,2012,16(6):81-86.
ZHANG Hongwei,YU Fashan,BU Xuhui,et al.Robust iterative learning control for permanent magnet linear motor[J].Electric Machines and Control,2012,16(6):81-86.
[6]DE ROOVER D,BOSGRA O H.Synthesis of robust multivariable iterative learning controllers with application to a wafer stage motion system[J].International Journal of Control,2000,73(10):968-979.
[7]VAN OOSTEN C L,BOSGRA O H,DIJKSTRA B G.Reducing residual vibrations through iterative learning control,with application to a wafer stage[C]//2004 American Control Conference,June 30-July 2,2004,Boston,USA:IEEE,2004,6:5150-5155.
[8]HEERTJES M,TSO T.Nonlinear iterative learning control with applications to lithographic machinery[J].Control Engineering Practice,2007,15(12):1545-1555.
[9]MISHRA S,COAPLEN J,TOMIZUKA M.Precision positioning of wafer scanners:segmented iterative learning control for nonreprtitive disturbances[J].IEEE Control Systems Magazine,2007,27(4):20-25.
[10]ROTARIU I,STEINBUCH M,ELLENBROEK R.Adaptive iterative learning control for high precision motion systems[J].IEEE Transactions on Control Systems Technology,2008,16(5):1075-1082.
[11]MISHRA S,TOMIZUKA M.Projection-based iterative learning control for wafer scanner systems[J].IEEE/ASME Transactions on Mechatronics,2009,14(3):388-393.
[12]GUNNARSSON S,NORRLOF M.On the design of ILC algorithms using optimization[J].Automatica,2001,37(12):2011-2016.
[13]XU Z,ZHAO J,YANG Y,et al.Robust iterative learning control with quadratic performance index[J].Industrial&Engineering Chemistry Research,2012,51(2):872-881.
[14]陈兴林,姜晓明,王岩.扫描光刻系统的分段迭代学习控制策略[J].哈尔滨工业大学学报,2013,45(7):18-23.
CHEN Xinglin,JIANG Xiaoming,WANG Yan.Segmented iterative learning control strategy for wafer scanner systems[J].Journal of Harbin Institute of Technology,2013,45(7):18-23.
[15]陈兴林,姜晓明,王程.晶圆扫描光刻系统的有效非因果学习控制[J].控制理论与应用,2013,30(10):1258-1264.
CHEN Xinglin,JIANG Xiaoming,WANG Cheng.Effective noncausal learning control for wafer scanner systems[J].Control Theory&Applications,2013,30(10):1258-1264.