无刷交流同步电机无位置传感器起动控制
2014-09-20魏佳丹史明明吴天国韩楚周波
魏佳丹, 史明明, 吴天国, 韩楚, 周波
(1.南京航空航天大学江苏省新能源发电与电能变换重点实验室,江苏南京 210016;2.江苏省电力公司电力科学研究院,江苏南京 211103;3.中航工业沈阳飞机设计研究所,辽宁沈阳 110035)
0 引言
随着航空电源技术的不断进步,变频交流电源系统由于结构简单、系统运行效率高,能够兼容传统恒频电源系统的各型用电设备,并且主电机直接与发动机相连,能够实现起动、发电一体化功能,成为目前大型飞机电源系统的首选方案,并且在新型的大型民用飞机A380、B787上获得了成功应用[1-4]。然而目前适用于变频交流电源系统的无刷交流同步电机,虽然经过50多年的发展历程,结构设计、制造技术成熟,但是其副励磁机、主励磁机、主电机三部分组成结构,使得电机静止时,若采用传统直流励磁方式,主电机无法得到励磁,即起动过程存在励磁困难,难以实现起动运行功能。
传统无刷交流同步电机一般采用异步起动,起动过程中利用主电机转子中阻尼绕组的感应电流,产生起动转矩[5]。但是该方法需要对主电机励磁绕组结构加以调整,串联大电阻用来限制励磁绕组的感应过电压,增加了电机系统的复杂性,并且难以实现起动、发电一体化。因此国、内外学者针对无刷励磁同步电机起动控制问题,提出了励磁机绕组结构设计、控制技术改进等方法。Xu Mingzhou提出一种无刷励磁同步电机励磁机定子三相绕组结构形式,起动时将三相绕组通过接触器构成星型连接,提供三相交流励磁,发电时则通过接触器串联成直流励磁绕组结构[6];D N Taneja提出一种励磁机双励磁绕组结构方案,在传统无刷励磁同步电机的励磁机中增加一套三相交流励磁绕组用于起动控制,直流励磁绕组用于发电控制,实现起动发电全过程励磁控制[7-8]。上述励磁控制方案均需要对励磁机定子及绕组结构重新设计,以实现起动交流励磁能,并且需要在无刷交流同步电机转子增加位置传感器以实现转子位置检测。然而普通位置传感器给系统带来了高成本、安装维护困难、抗干扰能力下降、可靠性降低等缺陷问题,因此通过各种不同的估计方法而得到电机的速度和位置信息的技术,一直以来成为其控制技术领域中的研究热点之一[9-11]。
类似其他类型交流电机,采用基于反电势和磁链估测法[12-14]、基于观测器法[15]等方法均需要检测无刷交流同步电机的反电势,起动运行过程在零速或低速时会因反电势过小或无法检测而失败,仅适用于高速运行;文献[16]中Goodrich公司针对APU起动/发电机,采用脉动高频电压注入法,提取电机的高频电流(电压)信号以估算转子的凸极位置及转速,该方法无需知道电机的精确参数,也不需要额外的硬件。但由于无刷交流同步电机的特殊结构,采用高频注入信号,将会在主电机励磁绕组和阻尼绕组中产生感应电流,导致电机起动过程产生转矩波动,影响到高频信号注入法估测转子位置的准确性,并且该方法实现过程较为困难。
因此本文在上述研究工作的基础上,针对无刷励磁同步电机起动过程励磁控制问题,详细分析单相交流励磁工作原理及其效果,结合无刷励磁同步电机起动工作原理,提出一种“初始定位+外同步+自同步”的方波电流形式起动方法,并构建起动实现平台,对无刷交流同步电机的全转速范围起动过程进行了试验验证。
1 单相交流励磁工作原理
无刷交流同步电机由副励磁机、励磁机和主电机三部分组成,其中副励磁机为永磁发电机,仅在发电运行时给励磁机和发电机控制提供电源,实现无刷交流同步电机的独立运行,但在起动运行过程中不起作用;励磁机为旋转电枢式电励磁同步电机,励磁绕组在定子侧,三相电枢绕组在转子侧,并与旋转整流器相连;主电机为旋转磁极式电励磁同步电机,励磁绕组连接在旋转整流器的输出端两侧。电机旋转过程中给励磁机的励磁绕组通电之后,其电枢绕组中感应出电势,经过旋转整流器后为主电机的励磁绕组供电,实现无刷励磁功能。可见,在无刷励磁系统中,励磁机是主电机励磁绕组的供电来源,起动全过程中需要对励磁机定子侧励磁电流进行合理控制,从而实现:(1)使电机在额定转速以下能通过非电流过载的方式产生比额定值更大的转矩;(2)通过弱磁实现恒功率运行时,扩展起动机的转速范围,满足发动机的需求。
但是无刷交流同步电机在静止时,若励磁机的定子侧励磁绕组采用直流励磁,主电机将无法获得励磁,电机不能起动[17]。在不改变无刷励磁同步电机结构的基础上,为解决这个问题,通常采用单相交流励磁方案[18]。起动时在原有励磁机的励磁绕组中通入单相交流电,建立脉振磁场,在主电机励磁绕组中感应产生励磁电流,控制主电机带动发动机顺利的起动;当主电机达到一定转速,直流励磁效果优于单相交流励磁时,再切换为直流电。这种方案无需改变电机结构,使无刷交流同步电机实现电动功能,具有重要意义和实用价值。
当励磁机的励磁绕组通入频率为f1的单相交流电ife时,其建立的基波磁势是脉振磁势F,如图1所示。
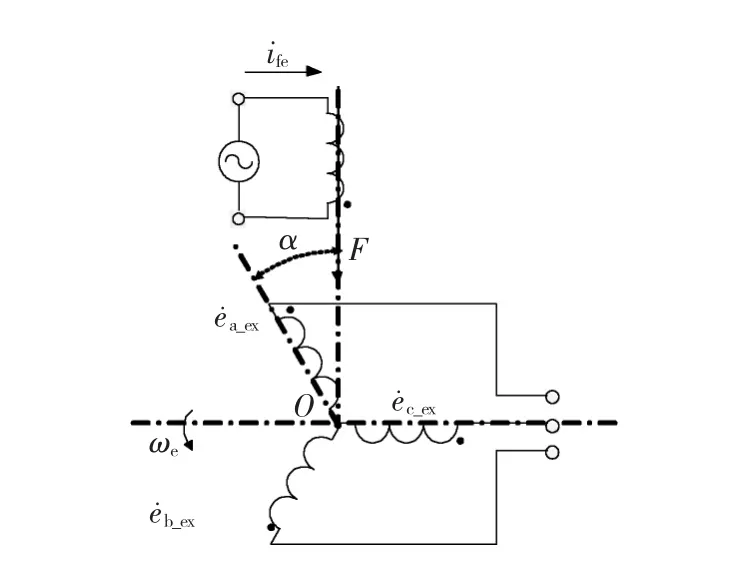
图1 励磁机等效结构图Fig.1 Equivalent structure of exciter
其中,设定励磁电流为

式中:Ife为励磁电流的幅值;ω1为励磁电流的角频率。
当无刷励磁同步电机转动角频率为ωe时,励磁机a相绕组与励磁绕组之间的磁链为

式中:Msfe为励磁机的励磁绕组与电枢绕组的最大互感系数;α为初始时刻励磁机a相绕组轴线超前励磁绕组轴线的电角度。
则励磁机转子电枢绕组中产生的感应电势为
式中:ea-ex、eb-ex、ec-ex分别为励磁机转子a、b、c三相绕组感应电势;ωe为电机机械角速度;p为微分算子。
将上式推导得到励磁机绕组感应电势为

式中,励磁机感应电势由两部分组成,其中第一部分是变压器电势,其幅值与励磁电流的频率相关;第二部分是切割电势,其幅值与电机的转速相关。
根据励磁机的励磁电流频率与转速之间的关系,可分为以下3种情况:
(1)ω1≫ωe时

ea-ex的示意波形如图2所示,其包络线Ea-ex的角频率为ωe,即在励磁机励磁电流等其它参数不变的情况下,随着输入交流电频率的升高,励磁机转子感应电势幅值和频率不断增大,感应电势的幅值和频率与励磁电流频率成线性关系。
(2)ω1接近 ωe时
由式(4)可知,感应电势大小由励磁机的转速和励磁电流频率共同决定,即励磁机转子上的变压器电势和切割电势都起作用。

图2 在ω1≫ωe情况下励磁机感应电势示意图Fig.2 Schematic diagram of the induced EMF at thecondition of ω1≫ωe

(3)ω1≪ωe时
即励磁机转子感应电势近似与电机转速成比例,此时感应电势主要为切割电势,变压器电势可忽略。
因此无刷励磁同步电机起动过程中可以根据电机参数及起动转速范围计算交流励磁条件下励磁机转子绕组感应电势,选择最优的交流励磁频率。当某一转速下,直流励磁感应电压幅值与交流励磁相同时,即当 ω1=ωe时,交、直流励磁励磁效果接近,可作为励磁切换点,此时电机转速为

即当励磁机极对数Pe为3,单相交流频率f1为50 Hz,计算得到的励磁切换点转速n为700 r/min左右。在电机实际运行中,需结合电枢控制策略、负载情况适当调整切换点的大小,保证无刷励磁同步电机起动初始时刻励磁机为主电机提供足够的励磁电流,克服发动机的阻转矩,实现起动功能。
2 无位置起动控制策略
2.1 转子初始定位
转子初始位置的确定是无位置传感器无刷交流同步起动/发电机稳定起动的基础,直接影响系统最大起动转矩和最小起动时间[19]。传统永磁电机通常采用通直流电的方法使转子初始位置固定,实现初始位置判定,但是该方法通常不适用于带发动机负载的起动系统。本文针对无刷励磁同步电机提出一种主电机感应电势法检测转子初始位置。
本系统中主电机采用三相六状态120°导通模式,理想情况下,每时刻电机两相绕组导通,另一相浮空。根据主电机反电势波形可将主电机定子空间分为6个扇区,无刷交流同步起动/发电机每60°换相一次,在任一扇区内主电机的电枢磁场总是超前转子磁场60°到120°电角度,则定子电枢磁场总是吸引转子励磁磁场,它们之间能够产生正的平均电磁转矩。因此在无刷交流同步电机起动控制中仅需获知转子磁极初始位置所在扇区,对其位置精度要求不高,为转子初始位置的检测提供了方便。
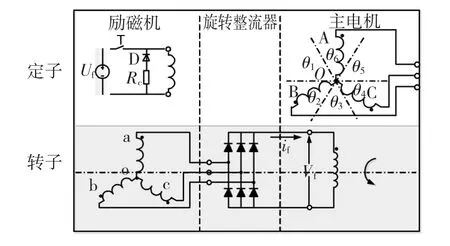
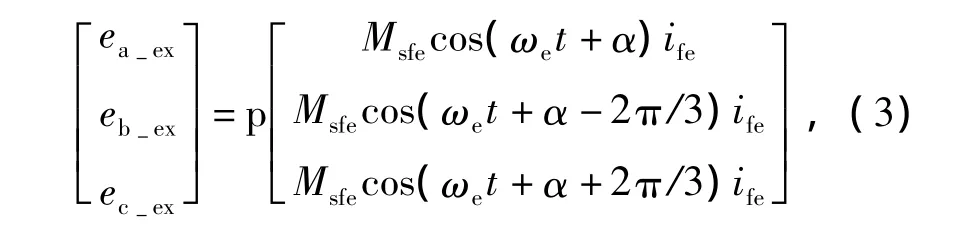
图3 无刷交流同步电机的初始定位原理结构Fig.3 Principle structure of initial rotor position estimation for the brushless synchronous machine
初始位置检测原理是在主电机电枢绕组不通电的情况下,投入转子励磁,其工作原理如图3所示,在励磁机定子绕组中串入开关管T、二极管D和电阻Rc。无刷交流同步电机静止时,在主电机定子绕组开路情况下,交流励磁机转子绕组上施加励磁电压,一段时间后,由开关T切断励磁电压,励磁机定子电流经由其绕组中会感应出电压,经过旋转整流器整流后使D、Rc构成的泄放回路从稳态值减小到零过程中,得主电机激磁磁场也发生变化,在主电机定子侧同样会产生感生电势。由于转子初始位置判断期间,主电机的定子绕组开路,其气隙磁通仅由励磁机转子电流产生,该反电势信号能反映转子的磁极位置。随着主电机转子位置不同,其三相绕组感应的电势大小、方向也将不同。根据图4所示无刷励磁势为负。通过对主电机定子三相绕组感应电压极性同步电机主电机的物理模型,θ1~θ6表示转子旋转一周的6个扇区。假设转子磁极d轴与A相绕组轴向垂直,当转子磁通增大时,A相绕组无感应电势产生,而B、C两相绕组上产生方向相反、大小相等的感应电势,且B相感应电势为正,C相感应电判别,就可以确定出主电机转子直轴所处的扇区位置。表1中列出了转子磁极所在扇区与感应电势极性之间的关系,根据检测的主电机三相绕组感应电势的极性即可判定转子所在扇区。
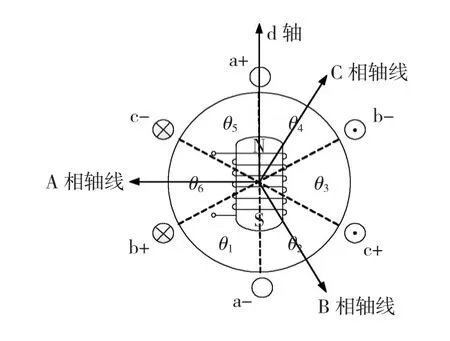
图4 无刷励磁同步电机主电机等效模型Fig.4 Equivalent model of main generator for the brushless synchronous machine
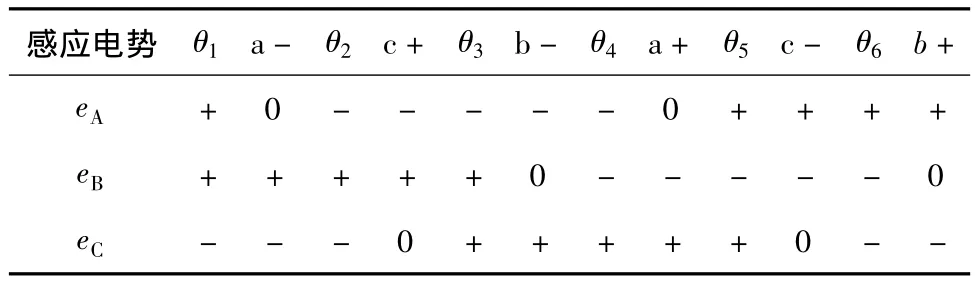
表1 主电机定子绕组感应电势极性表Table 1 Polarity of the induced EMF of phase winding
2.2 他控式起动
主电机的转子初始位置确定后,控制器会根据电机转向给定外同步信号,触发逆变器相应功率管导通。外同步换相信号从低频到高频逐渐增加,无刷交流同步起动/发电机转速也随之由静止逐步加速。
在实现他控式加速起动时,主控制器预先设定的电机转速理想变化规律称为加速曲线,加速曲线的变化规律受电机的负载大小、转动惯量以及外施电压等诸多因素的影响。根据电机运动方程,电机从静止至低速运行阶段,由于转速较低,其中摩擦系数可忽略,则电机运动方程可简化为

式中:Te为合成转矩;TL为负载转矩;J为系统的转动惯量。
若定义三相反电势ea、eb、ec为转子角速度和位置的函数为

式中:Ke为电机反电势常数;fx(θ)为反电势波形函数。
根据机电能量转换原理,同步电机的电磁转矩可以表达为

将式(10)代入式(8)中可得
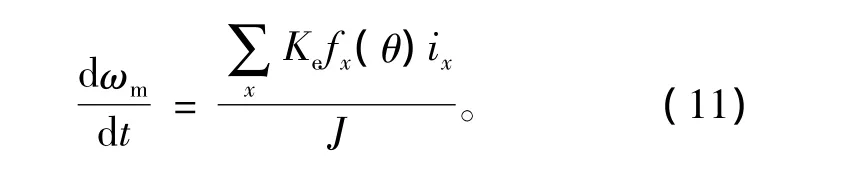
可见,电机起动初期等效外施电压较高时,可通过限制电枢电流峰值的方法使电机以最大电磁转矩起动,电机拖动额定负载起动时加速度近似与转动惯量成反比,由此可以估算出电机起动时的加速度,即可确定电机的加速曲线。
2.3 自控式起动
当电机转速上升到一定的速度时,进入切换环节。传统的切换方法是不断检测外同步信号与反电势法检测得到的位置信号的夹角,即相位差ε,如图5所示,当ε小于某个角度阙值Δ时,就要适时地切换为自控式起动状态[20]。在三相六状态120°工作方式下,无刷交流同步电机每转60°电角度就需换相一次,旋转一周共需要6个换相信号。由于主电机每相反电势有2个过零点,三相共有6个过零点,根据这6个过零点将其延迟30°电角度,即可获得6个换相信号。
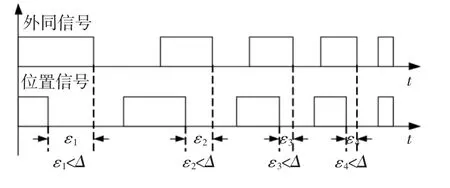
图5 状态切换过程示意图Fig.5 Schematic diagram of the status switching process
3 实验验证

图6 无位置传感器无刷交流同步起动/发电机的起动系统硬件框图Fig.6 The hardware diagram of the brushless synchronous starter/generator based on the position sensorless control in the start mode
无位置传感器无刷交流同步起动/发电机的起动系统硬件框图如图6所示,主要包括主功率电路、励磁功率电路、隔离驱动电路、主控制电路及信号采样调理电路等部分。将检测到的三相输入电压经调理后送至DSP实现相电压过零点的检测,进而确定电机转子位置信号,并将位置信号提供给CPLD实现换流逻辑控制。同时检测滤波电容后母线电流信号、励磁电流信号经调理后送至DSP实现电流的闭环控制。DSP依据系统采用的控制策略实时处理各个控制变量,并输出PWM脉冲信号到CPLD,经逻辑译码和换流控制后得到6个主功率电路驱动信号及4个励磁功率电路驱动信号,驱动功率开关实现对无刷交流同步起动/发电机的控制。
3.1 初始位置判定试验
电机静止时,励磁机的定子绕组通入0.5 A直流电,主电机定子三相绕组开路,通电一段时间后,关闭所有开关管。在励磁电压切断瞬间,主电机定子绕组上产生的感应电势如图7所示,主电机的转子位置不同主电机的感应电压极性也不同,通过比较三相电压脉冲的正负极性及维持时间,结合表4.1即可确定主电机转子所在扇区,CPLD处理后将判断结果送至DSP中并通过LED显示。图8(a)对应转子磁极位于θ6扇区,图7(d)对应转子磁极位于θ5扇区。由于硬件检测电路仅能准确判断10 mV以上的电压极性,因此当转子磁极位于特殊位置,如某相轴线上,即该相感应电势接近与零,则需要进一步通过比较另两相电压大小来确定该相电压极性,如图7(b)、(c)所示。当C相感应电势很小时,可通过比较A、B相电势,确定图7(b)对应转子磁极位于θ6扇区,图7(c)对应转子磁极d轴位于C-位置。
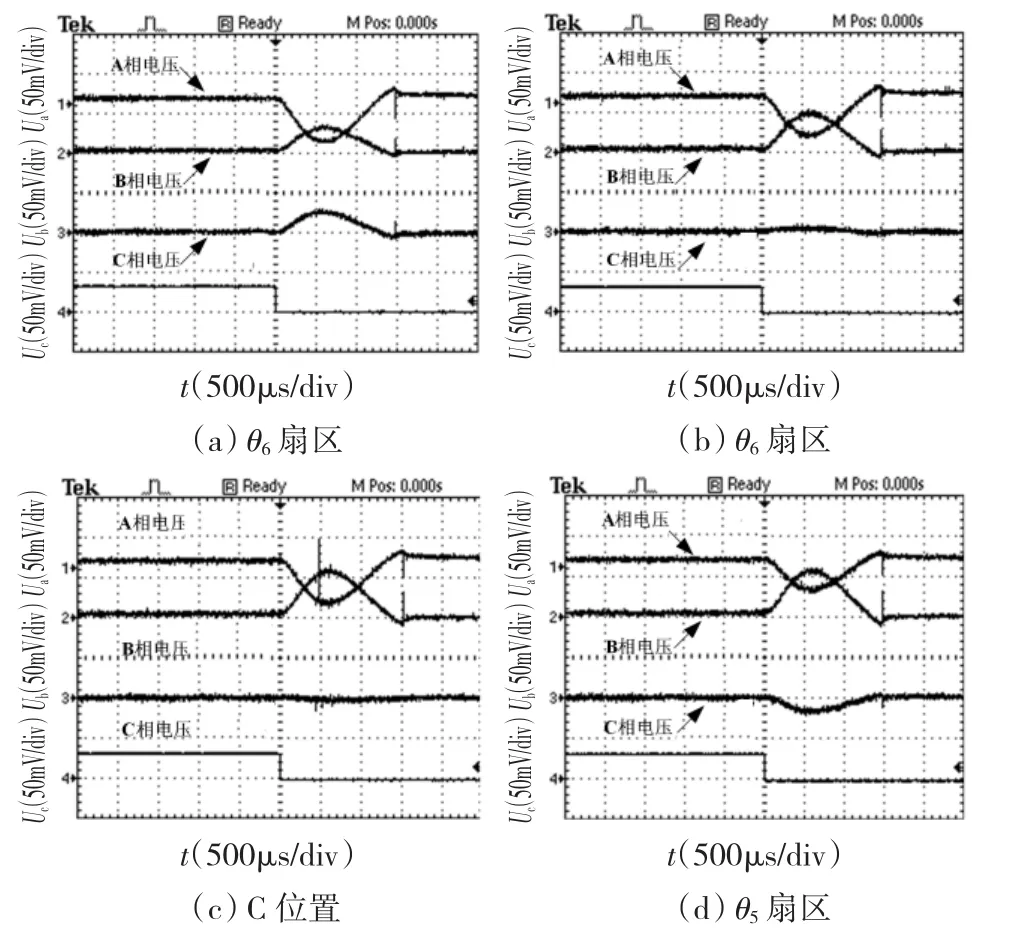
图7 转子不同位置时的主电机相电压波形Fig.7 Phase voltage waveforms of the main generator at different position of θ5,θ6and C-
3.2 加速起动试验
在空载条件下,采用本文所提出的无位置传感器起动控制方法进行电机加速实验,直流母线电压为160 V,单相交流励磁频率50 Hz,直流励磁电流0.5 A。图8是电机无位置传感器起动加速波形,从实验波形可以看出,在15 s内电机能够从零速稳定升速至额定转速1 500 r/min,其中在0~12.7 s间运行于他控式起动控制过程,在12.7~15 s运行于自同步加速状态。
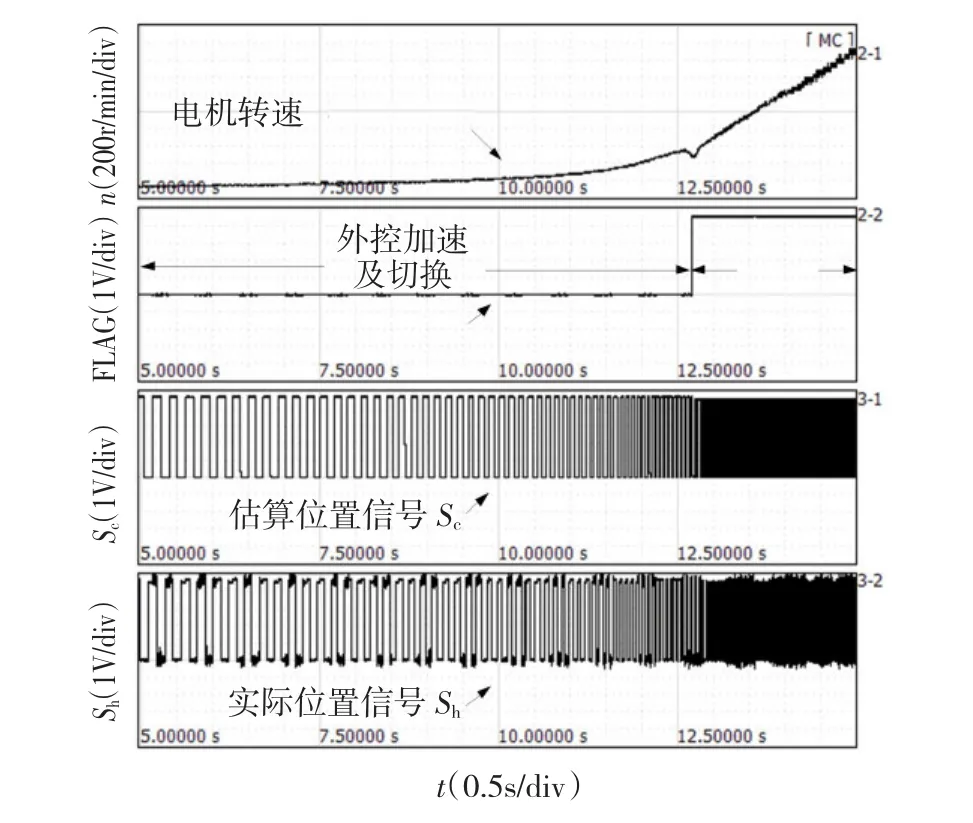
图8 电机无位置传感器起动加速实验波形Fig.8 Acceleration waveforms of the proposed machine in the starting mode under position sensorless control
在他控式起动实验中,设置电机的加速曲线为初始每个电压矢量保持30 ms,一个周期结束后,每个状态保持时间减少0.2 ms,如此循环。图9为他控式起动阶段主电机C相相电流波形。当t=2.25 s时,电机转速约为50 r/min,最大允许电流给定值为10 A,电机相电流近似矩形波;当t=7.75 s时,电机转速约为200 r/min,此时外同步位置信号滞后实际位置信号ε角度,即滞后ε角换相,从而导致非导通相存在续流电流,由于绕组电感的影响,该续流电流不能立即降为零;当t=11.5 s时,电机转速约为500 r/min,通过逐步减小电流限幅值,换相角误差逐步减小,非导通相续流电流也随之逐渐减小。图10为对应条件下测得的电机估算位置信号Sc和电机实际位置信号Sh波形,此时Sc表示外同步位置信号,Sh与电压检测电路得到位置信号一致。可以看出,电机在他控式起动过程中能够稳定运行,当电机转速达到预定转速500 r/min时,通过逐步减小电流给定值,Sc与Sh之间的夹角不断减小,在12.5 s时满足状态切换条件。影响了其过零点的检测结果,使得位置估计信号存在一定的抖动,但是因为该切换过程时间较为短暂,不影响电机的转速特性,从12.7 s开始,电机切入自控式加速过程,此时估算位置信号Sc由反电势过零点检测获得。
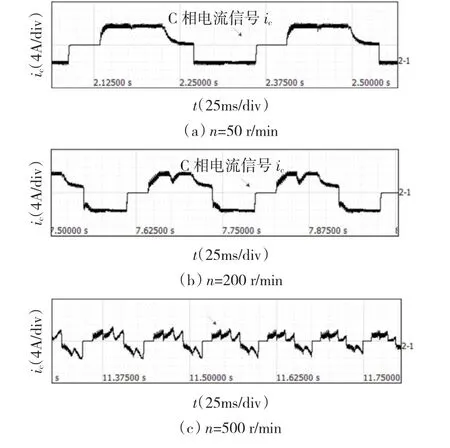
图9 他控式起动阶段相电流波形Fig.9 Phase current waveforms in theseparately start control
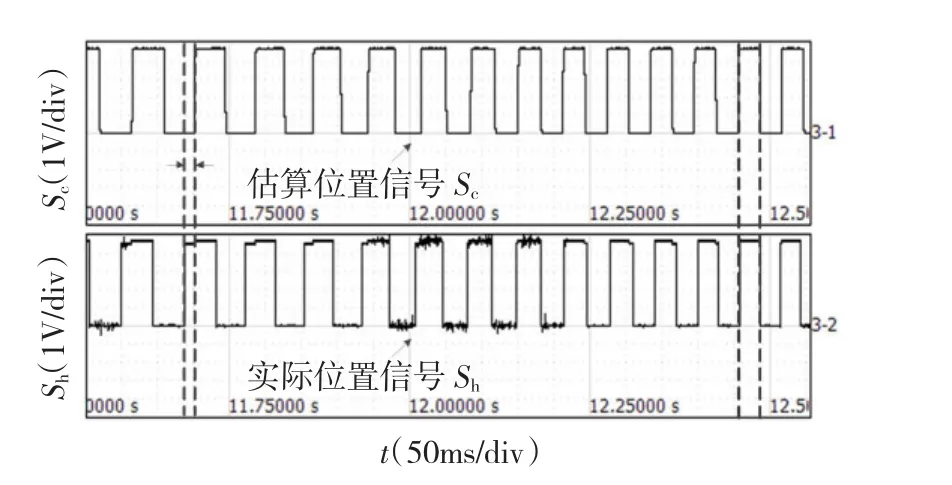
图10 他控式起动阶段位置信号波形Fig.10 Position signal waveforms in the separately start control
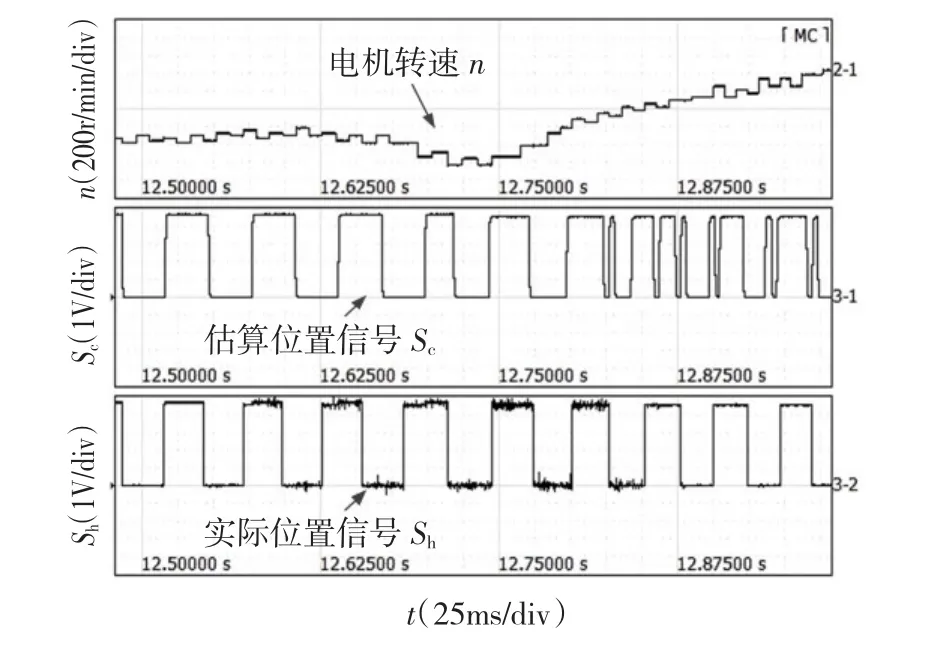
图11 状态切换过程波形Fig.11 Speed and position signal waveforms in status switching process
图12为自控式加速阶段的电机位置信号波形,估算位置信号Sc与实际电机位置信号Sh近似一致,可见,电机能够准确跟踪自同步换相控制信号,平稳升至额定转速。图13为相电流的波形,电机相电流近似矩形波,一个周期中正负半周各导通120°,符合三相六拍120°导通方式的工作特性,实现了反电势检测,位置闭环控制功能。
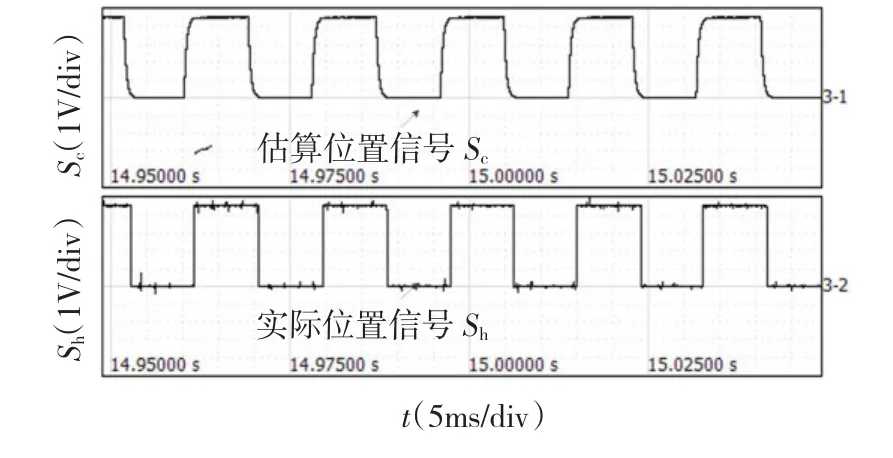
图12 估计与实际位置信号对比波形Fig.12 Estimated and actual position waveforms for the comparison

图13 自控式加速阶段实验电流波形Fig.13 Phase current waveform in the self-control mode
4 结语
本文针对无刷交流同步电机应用于变频交流起动发电系统中存在的励磁控制、位置检测问题,在现有无刷励磁同步电机起动控制研究的基础上,详细分析单相交流励磁控制方法的基础上,提出一种基于“感应电势”的初始位置检测方法,采用转子定位—外同步—自同步的起动控制策略,实现全转速范围内无刷励磁同步电机无位置传感器起动运行。
[1]CHANG Jie,WANG Anua.New VF-power system architecture and evaluation for future aircraft[J].IEEE Transactions on Aerospace and Electronic Systems,2006,42(2):527-539.
[2]MAGDY K A,MAGNUS K R,BAKER D.Aircraft Starter Generator for Variable Frequency Electrical System:USP,6838779[P].2005.
[3]HOPPE R J,THOMSON S M,TURNER D J.Adjustable Variable Frequency Starter/generator System:United States Patent:7105937[P].2006.
[4]杨善水,张卓然,杨春源,等.基于多环调压控制的混合励磁航空变频交流发电系统[J],电工技术学报,2012,27(3):176-180.
YANG Shangshui,ZHANG Zhuoran,YANG Chunyuan,et al.Aeronautic variable frequency AC generation system based on multi-loop controlled voltage regulator[J].Transactions of China Electrotechnical Society,2012,27(3):176-180.
[5]王祥珩,盛超,王亦婷.无刷励磁同步电动机起动的研究.清华大学学报,1999,39(7):9-12.
WANG Xianghang,SHEN Chao,WANG Yiting.Research on starting of brushless synchronous motors[J].Journal of Tsinghua University,1999,39(7):9-12.
[6]XU Mingzhou,PEARSON W T,ANGHEL C E,et al.Gas Turbine Engine Starter Generator with Multiple Windings on Each Exciter Stator Pole:USP,6906479B2[P].2005.
[7]TANEJA D N,HUANG Hao,PADGETT G A,et al.Dual-StructuredAircraftEngineStarter/Generator:USP,7687928B2[P].2010.
[8]HUANG Hao,KARIPIDES D,ABBAS M,et al.Aircraft Engine Starter/generator and Controller:USP,20090174188[P].2009.
[9]史婷娜,吴曙光,方攸同,等.无位置传感器永磁无刷直流电机的起动控制研究[J],中国电机工程学报,2009,29(6):111-116.
SHI Tingna,WU Shuguang,FANG Youtong,et al.Reasearch on sensorless PM brushless DC motor starting control[J].Proceedings of the CSEE,2009,29(6):111-116.
[10]刘卫国,宋受俊,SCHÄFER U.无位置传感器开关磁阻电机初始位置检测方法[J],中国电机工程学报,2009,29(4):91-97.
LIU Weiguo,SONG Shoujun,SCHÄFER U.Initial position estimation of sensorless switched reluctance motor[J].Proceedings of the CSEE,2009,29(4):91-97.
[11]王高林,杨荣峰,于泳,等.内置式永磁同步电机无位置传感器控制[J],中国电机工程学报,2010,30(30):93-98.
WANG Gaolin,YANG Rongfeng,YU Yong,et al.Position sensorless control for interior permanent magnet synchronous motor[J].Proceedings of the CSEE,2010,30(30):93-98.
[12]ROZMAN G I,MARKUNAS A L,NUECHTERLEIN P E.Starter/generator System with Variable-frequency Exciter Control:USP,5594322[P].1997.
[13]MEZS P A,NOZARI F,JULIAN A L,et al.Sensorless synchronous motor drive for use on commercial transport airplanes[J].IEEE Transactions on Industry Applications,1995,31(4):850-859.
[14]HASEGAWA C,NISHIKATA S.A sensorless starting method for self-controlled synchronous motors[J].IEEJ Transactions on Industry Applications,2008,128(2):1381-1387.
[15]MAALOUF A,LE BALLOIS S,IDKHAJINE L.Sensorless control of brushless exciter synchronous starter generator using extended Kalman filter[C]//IECON’09,Nov 3-5,2009,Porto,Portu-gal.2009:2581-2586.
[16]GRIFFO A,DRURY D,SAWATA T,et al.Sensorless starting of a wound field synchronous starter/generator for aerospace applications[J].IEEE Transactions on Industrial Electronics,2011,59(9):3579-3587
[17]朱姝姝,刘闯,宁银行,等.一种新型混合励磁同步发电机的两级式无刷励磁方法[J],中国电机工程学报,2012,32(21):99-104.
ZHU Shushu,LIU Chuang,NING Yinhang,et al.A novel twostage brushless excitation method for hybrid excitation synchronous generators[J].Proceedings of the CSEE,2012,32(21):99-104.
[18]陈宝林,严仰光,陈广华,等.飞机起动/发电双功能系统电动状态单相交流励磁的研究[J].电工技术杂志,2001(1):7-8.
CHEN Baolin,YAN Yangguang,CHEN Guanghua,et al.Study on single-phase AC excitation of electromotion state about start/generate electricity two function system of aeroplane[J].Electrotechnical Journal,2001(1):7-8.
[19]朱熀秋,成秋良.无起动绕组永磁同步电机初始定位及起动策略[J],中国电机工程学报,2008,28(9):61-65.
ZHU Huangqiu,CHENG Qiuliang.Initial orientation and starting strategy on PMSM without starting windings[J].Proceedings of the CSEE,2008,28(9):61-65.
[20]廖承喜,朱志杰,翁微.无刷直流电机三段式自起动关键技术研究.电力电子技术,2008,42(5):61-62.
LIAO Chengxi,ZHU Zhijie,WENG Wei.Study about the key technology of three-step self-start on brushless DC motor[J].Power Electronics,2008,42(5):61-62.