一种改善PMSM动态性能的弱磁策略
2014-09-20周华伟陈龙刘国海蒋彦
周华伟, 陈龙, 刘国海, 蒋彦
(1.江苏大学 电气信息工程学院,江苏镇江 212013;2.江苏大学汽车工程研究院,江苏镇江 212013)
由于dq轴电流指令受电流圆限制,调整d轴电流指令后,q轴电流指令会自动调整,因此将式(10)改为
0 引言
永磁同步电机(permanent magnet synchronous motors,PMSM)以其高效率、高功率密度和高转矩/惯量比特性在轨道交通、电力牵引传动系统、电动汽车等要求较高的调速驱动系统中得到了广泛的应用[1]。弱磁控制能够在电压源逆变器(voltage source inverter,VSI)不增加容量的同时使电机在高速时恒功率输出,拓宽了电机调速范围。反电势在电机端电压中占的比重很大,和转速成比例,但电机运行在弱磁模式时,端电压受VSI供电电压的限制。因此最简单的弱磁策略是改变电机转子磁链使转子磁链与转速成反比,但这一方面牺牲了电机输出转矩的能力,更主要的是由于PMSM的转子磁场由永磁体产生,不能直接被减弱,其弱磁控制是利用直轴电枢反应使电机气隙磁场减弱,达到等效减弱磁场的效果[2],从而满足宽转速范围的调速要求。
梯度下降法[2]、弱磁前馈控制策略[3]根据电压限制椭圆以及电机参数求出d轴电流,具有良好的动态性能;但计算量大,参数鲁棒性差。
基于q轴电压调制的d轴电流补偿弱磁策略[4]具有良好的弱磁动态性能,但从电压差值到d轴补偿电流转换的增益与感抗相关。使用过调制模块输入和输出电压的差值计算反馈磁链,通过前馈磁链和反馈磁链相减实现抗饱和以及弱磁控制双重功能的策略[5-6],其前馈磁链需查表获得,制定表格需大量的实验,另从电压偏差到反馈磁链转换的增益需通过反复试验确定。
单电流调节器[7]利用系统弱磁后q轴电压受VSI最大输出电压的限制,通过控制d轴电流间接控制q轴电流的思想实现了深度弱磁。为避免确定q轴电压的困难,文献[8]将电压角引入了单电流调节器,d轴电流误差经PI直接获得电压矢量角。尽管它们具有良好的扩速性能,但动态性能不理想。
根据调节器抗饱和的思想,为避免调节器饱和,基于电压反馈的弱磁策略[9]采用dq轴电流调节器输出电压指令和VSI输出电压的极限值的差值经电压调节器获得d轴弱磁电流。其电压环直接决定着弱磁点和弱磁程度,无需检测母线电压,最大限度地利用了母线电压,具有优良的稳态性能和较强的鲁棒性。由于工作于电压饱和区附近,且需要经两个调节器(电流调节器、电压调节器)才能获得弱磁电流,转矩阶跃时系统瞬态响应性能不理想,甚至会引起较大的转矩脉动。采用VSI开关周期和电压矢量有效作用时间之和的差值经PI获得d轴补偿电流的弱磁策略[10-11],转矩动态性能也不理想。采用q轴电流误差经PI获得电流超前角的弱磁策略[12]稳态性能不理想。
PMSM矢量控制策略采用电流环控制,在调节器和VSI输出电压没有饱和时,电流误差很小甚至为零,只有饱和时才会产生较大的误差。因此只有抑制调节器和逆变器饱和才能使电流跟随性能好,只有电流跟随好,才能保证电机在弱磁区的稳态性能和动态性能。本文针对凸极PMSM在弱磁区电动工况下动态性能不好的现象,在对其它弱磁策略分析研究的基础上,提出一种改进PMSM弱磁动态性能的策略,且将其与基于电压反馈的弱磁策略在一台额定功率为20kW的凸极PMSM上进行了仿真和实验对比分析。
1 永磁同步电机弱磁理论
忽略定子电阻压降,PMSM在dq坐标系上的稳态电压方程[13]为

式中:Ld、Lq、id、iq、ud、uq分别为d、q轴电感、电流、电压;ψf为永磁磁链;ω为电角速度。

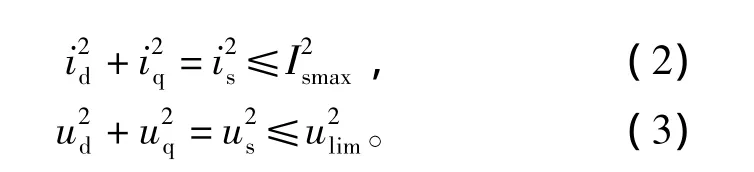
将式(1)代入式(3),则电压限制转化为电流限制


图1 PMSM的电气约束Fig.1 Voltage and current constraints of PMSM
转速较低时,电机工作点位于电流圆和最大转矩/电流(maximum torque per ampere,MTPA)线的交点(图1的A点),此时电机输出转矩最大。随着转速升高,电压椭圆向C点收缩,而C点位于MTPA线的左边,因此转速越高要求d轴电流id越偏负。实现id负向增加的策略在工程中常采用如图2所示的基于电压反馈的弱磁策略。对id限幅的目的是为了防止电流限制圆与电压限制椭圆无交点,引起电流失控[14]。

图2 基于电压反馈的弱磁控制框图Fig.2 Flux-weakening control block diagram based on feedback voltage
2 改善PMSM动态性能的弱磁策略
2.1 PMSM弱磁运行时动态性能不佳的原因
PMSM采用图2所示的弱磁策略在电动恒速弱磁工况下,如图3(为将ud-uq坐标平面映射到idiq坐标平面,ud-uq坐标进行了处理)所示,电机输出转矩由A点阶跃到B点,id减小、iq增加、ud减小、uq减小,但图2中dq轴电流调节器瞬时输出的减小增大;电机输出转矩由B点阶跃到A点,id增大、iq减小、ud增大、uq增大,但图2中dq轴电流调节器瞬时输出的增大、减小。可见电动工况下,在dq轴电流变化过程中只有d轴电流调节器输出和系统期望一致,而q轴电流调节器输出和系统期望相反。+和ulim的差值进行弱磁调节,没有考虑阶跃过程中q轴电流调节器输出的变化和系统期望相反的因素,进而致使调节器饱和,引起电流不跟随,导致短暂的失控现象,产生较大的转矩波动,极大地影响了PMSM在弱磁区的动态性能。因此需考虑q轴电流调节器对弱磁的影响。
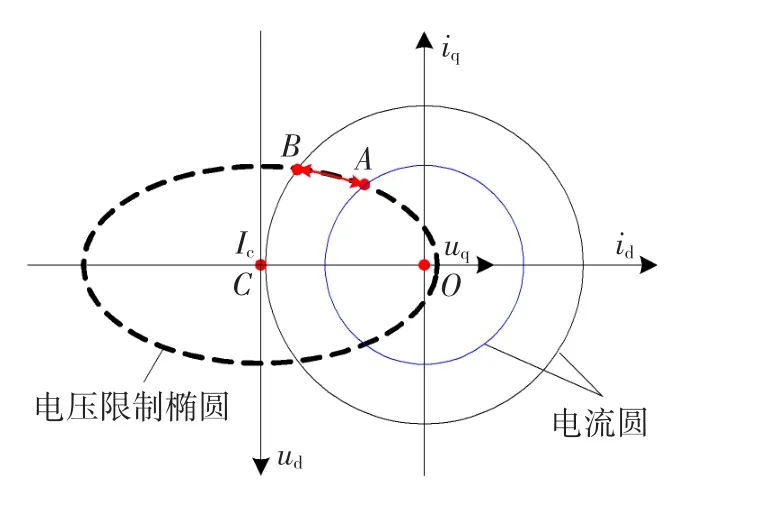
图3 在弱磁区恒速工况下转矩阶跃时电流理想轨迹Fig.3 Current ideal trajectories diagram with torque steps at the constant speed in flux-weakening region
可见图2弱磁策略只根据电压指令的幅值
2.2 弱磁控制策略的提出
在恒转矩区,电机端电压小于VSI输出电压极限值ulim,VSI和电流调节器均有电压余量能保证电流跟随指令,系统电压指令和VSI实际输出电压偏差为零;但在弱磁区,电机端电压达到VSI输出的ulim,VSI输出电压饱和,若不采取措施系统电压指令、和VSI实际输出电压ud、uq将出现偏差。稳态时dq轴电压偏差Δud、Δuq为

分析式(5)知,只有调整dq轴电流才能减小电压误差,电压误差圆递减方向用梯度下降法表示,引入代价函数[3]

定义dq轴调整电流idm、iqm变化率为
式中,α为调制系数。
式(7)两边积分且将其转换到频域得
为提高PMSM弱磁动态性能,只提供PMSM动态过程中所需的弱磁电流,于是引入高通滤波器滤除直流,滤波截止频率为ωc,式(8)变为

由于dq轴电流指令受电流圆限制,调整d轴电流指令后,q轴电流指令会自动调整,因此将式(10)改为

若图2增加电压前馈解耦控制策略[15],则dq轴电压指令为
式(12)代入式(5)得
将式(13)代入式(11)得
式(15)提供了PMSM动态过程所需的弱磁电流,稳态时所需的弱磁电流可有图2基于电压反馈的弱磁策略提供。另分析式(15)知,只有当估算的电感、永磁磁链参数和电机的真实参数一致时,Δidm=0方成立,此时idm才仅与q轴电流误差的积分相关。采用图2中的电压反馈策略可消除电机参数估算不准的影响,即Δidm无需通过计算获得,而是由反馈电压Us和ulim的差值经电压PI调节器获得的弱磁电流提供。
PMSM在弱磁区恒速运行,当转矩指令发生阶跃时,q轴电流误差积分能直接产生所需的弱磁电流,而基于电压反馈的弱磁策略需经过两个PI调节器才能产生弱磁电流,另外由于q轴电流误差积分器的直接作用减缓了的变化率,减轻了q轴电流调节器的负担。因此q轴积分误差产生弱磁电流的动态响应速度较快,直接从q轴电流调节器的源头削弱增减方向与系统期望方向不一致导致的影响,抑制调节器的饱和,改善电流动态跟随性能,提高转矩动态响应性能。反馈电压Us和ulim的差值的PI作用(基于电压反馈的弱磁控制)不但能提供稳态时所需的弱磁电流,考虑了VSI过调制的影响,而且保证了电机输出转矩的能力。
PMSM在MTPA区稳态运行时q轴电流误差为零,但当电流指令阶跃时q轴电流误差就出现了,这会产生额外的弱磁补偿电流,影响电机输出转矩的能力。为避免该情况,采用图2中基于电压反馈的弱磁策略产生电流的符号决定是否使用q轴电流误差积分,即电压反馈策略产生电流的符号为负时,q轴电流误差积分,开启弱磁控制;不为负时该积分器输出为零,关闭弱磁控制。因此,本文提出的弱磁策略如图4所示。
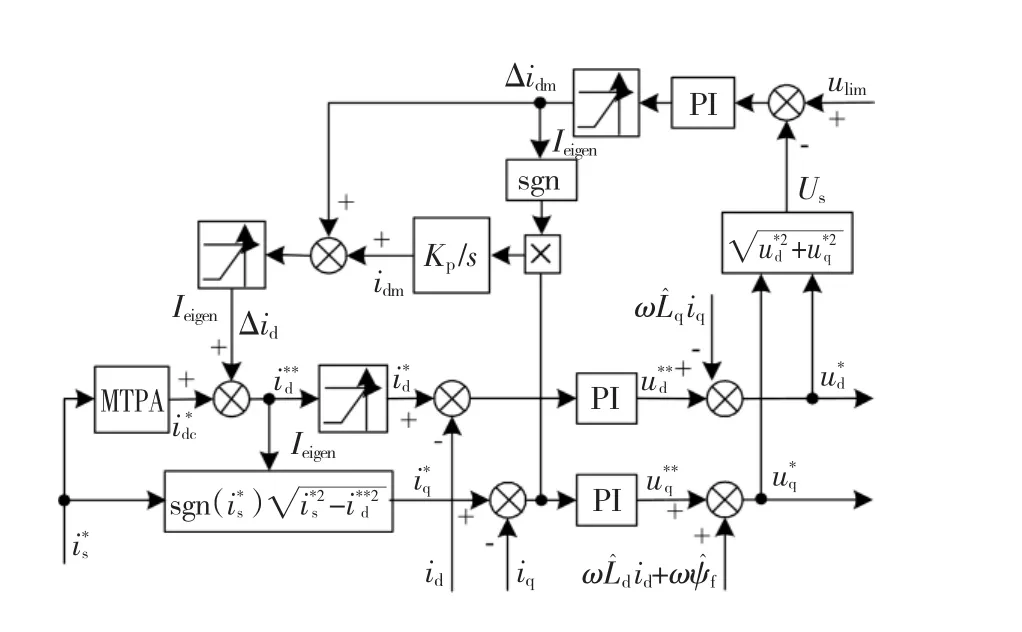
图4 本文提出的弱磁控制策略Fig.4 The proposed flux-weakening control strategy
3 实验验证
为验证本文提出的弱磁策略在电动弱磁工况下的可行性,按如下电机参数进行了仿真分析和实验验证。
PMSM参数为:额定功率20 kW,额定转速2 030 r/min,极对数3,定子相电阻26 mΩ,d轴电感0.52 mH,q轴电感1.02 mH,永磁磁链0.129 Wb。实验中母线电压260 V,d轴限幅电流Ieigen=-140 A,人为设定MTPA角为20°。
3.1 仿真分析
图5是PMSM转速为5 000 r/min,转矩在56 N·m和0 N·m之间阶跃时的电流仿真波形。基于电压反馈的弱磁策略在转矩从56 N·m阶跃为零时,dq轴电流不跟随,导致dq轴电流调节器输出正向饱和,引起Δid急剧减小,致使急剧减小直到<id时,PI方使退出正向饱和。根据式(1)知,一旦减小,iq必然增大,于是当<iq时,PI使退出正向饱和。因此该情况下的电流不跟随是短暂的,但这会极大地影响转矩动态响应性能。在电动汽车上会产生预想不到的制动转矩,这不但影响行车舒适性,且会引起行车危险。图5(b)表明本文提出的弱磁策略在转矩指令阶跃时能使电流很好地跟随。图6是转矩从56 N·m向0 N·m阶跃过程中dq轴电流沿电机转速5 000 r/min的电压椭圆由B向A变化轨迹,整个过程电流跟随很好,进一步证明了本文提出的弱磁策略能改善弱磁区的动态性能。
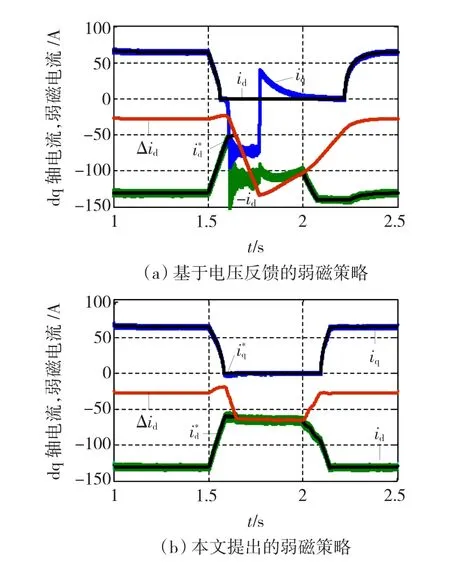
图5 转速5 000 r/min转矩在56 N·m和0 N·m之间阶跃时的电流响应Fig.5 Current responses with torque steps between 56 N·m and 0 N·m at 5 000 r/min
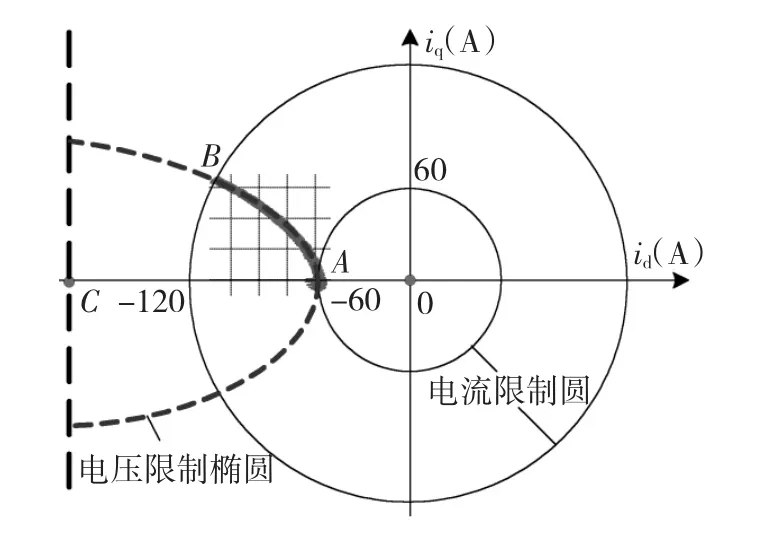
图6 id-iq平面上的电流轨迹Fig.6 Current trajectory in id-iqplane
3.2 实验结果
实验平台如图7所示,样机和电力测功机同轴连接,电力测功机工作于转速模式,样机工作于转矩模式,使用IXXAT CAN卡记录电机转速、dq轴电流和dq轴电压数据。

图7 实验平台Fig.7 Test bench
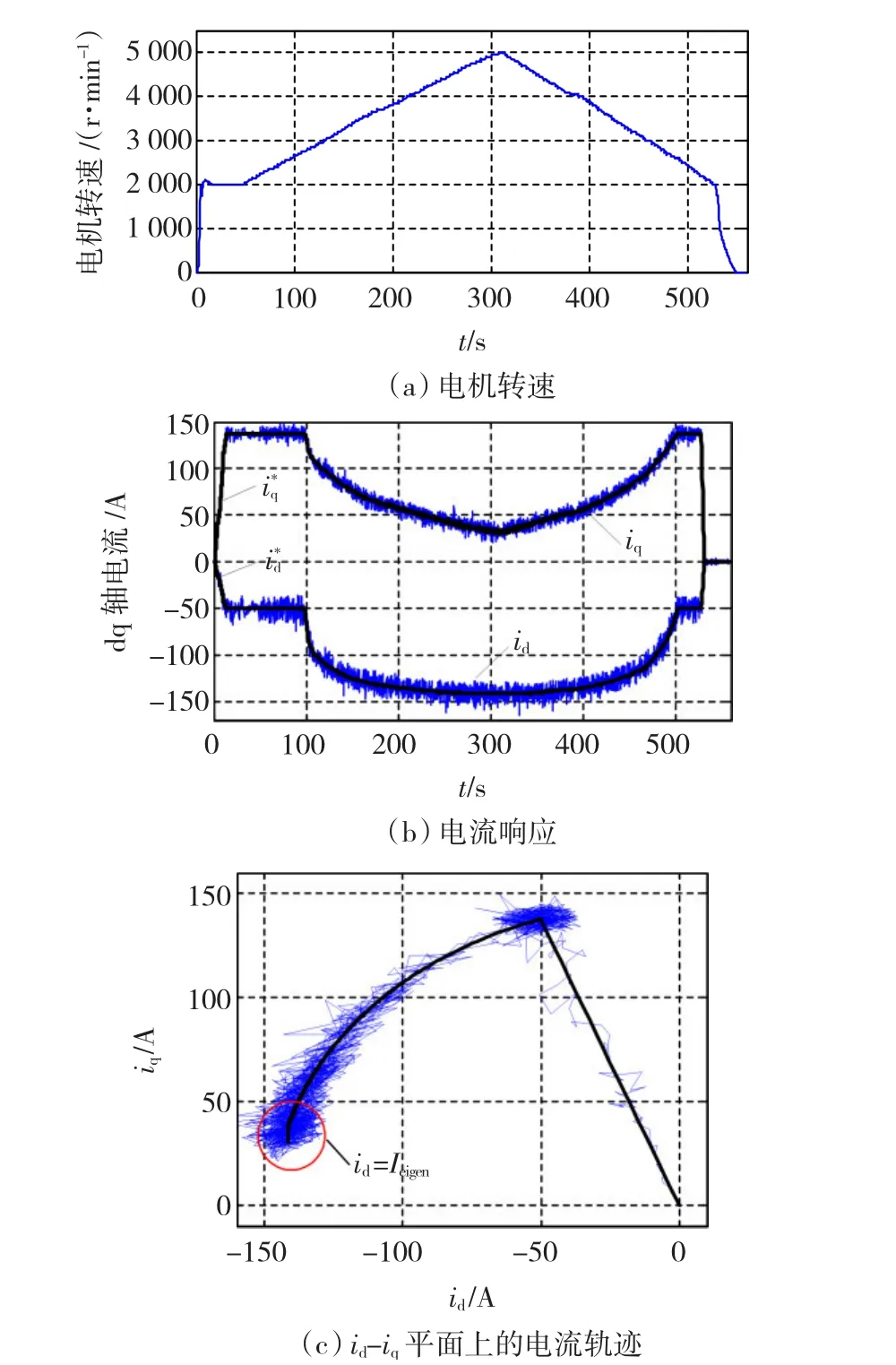
图8 基于电压反馈的弱磁策略的电流响应Fig.8 The current responses using the flux-weakening strategy based on feedback voltage
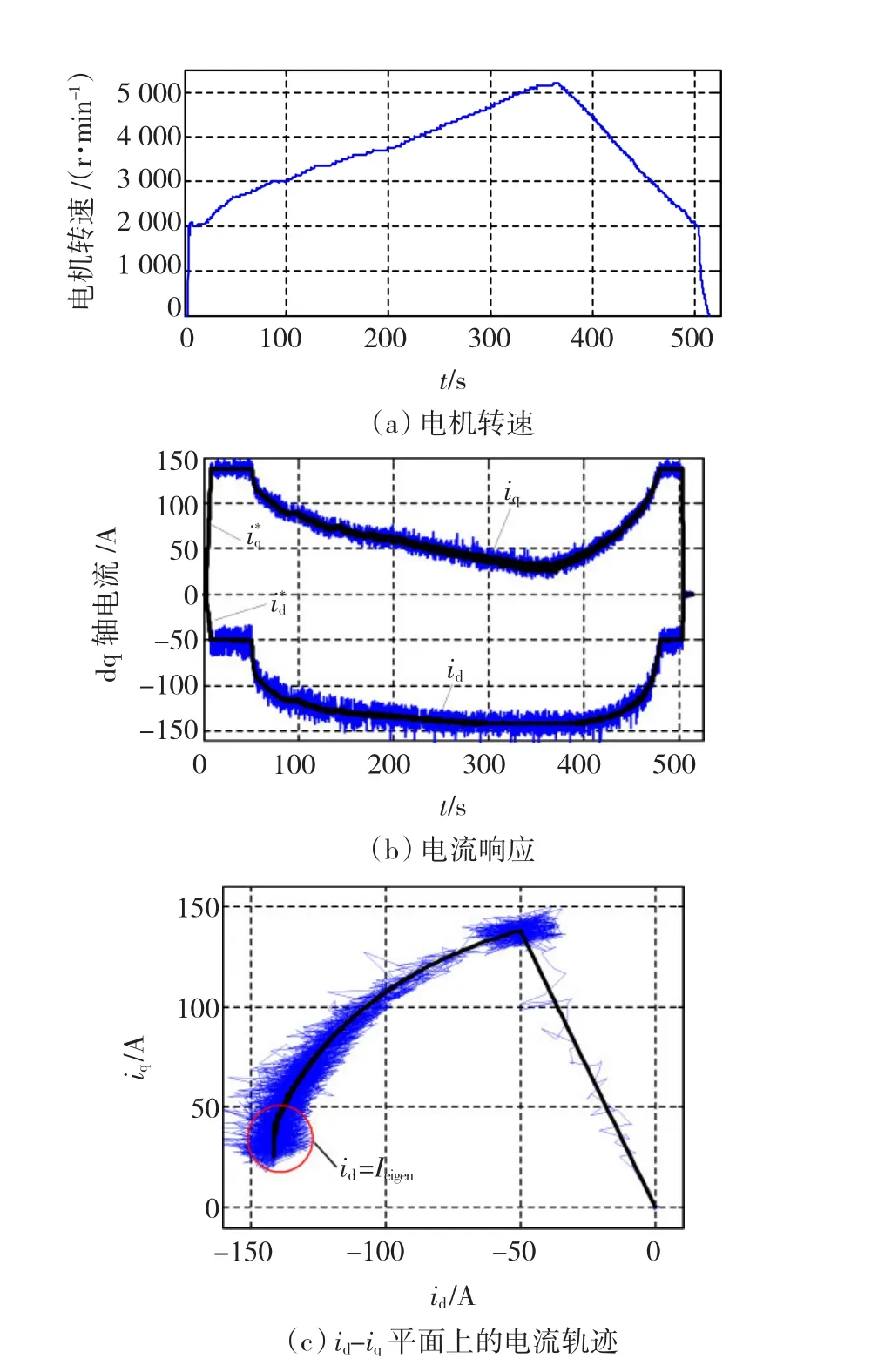
图9 本文提出的弱磁策略的电流响应Fig.9 The current responses using the proposed flux-weakening strategy
图10是PMSM运行在恒定转速3 500 r/min、转矩在13 N·m和54 N·m之间阶跃时的电流和电压响应曲线,此过程电机工作区域在恒转矩区和弱磁区之间切换;图11是PMSM运行在恒定转速4 000 r/min、转矩在13 N·m和46 N·m之间阶跃时的电流和电压响应曲线,此过程电机始终工作于弱磁区。可见无论PMSM输出转矩是在弱磁区和恒转矩区之间阶跃还是在弱磁区内阶跃,本文提出的弱磁控制策略在整个动态过程中电流调节器输出均不饱和,电流能很好地跟随,具有较好的动态性能和稳态性能。
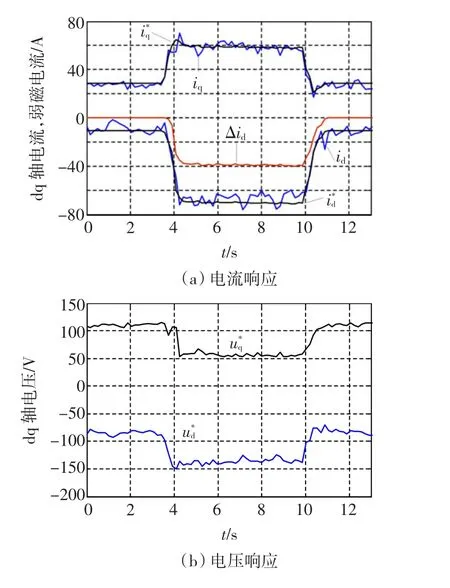
图10 转速3 500 r/min转矩在13 N·m和54 N·m之间阶跃时的电流和电压响应Fig.10 Current and voltage responses with torque steps between 13 N·m and 54 N·m at 3 500 r/min
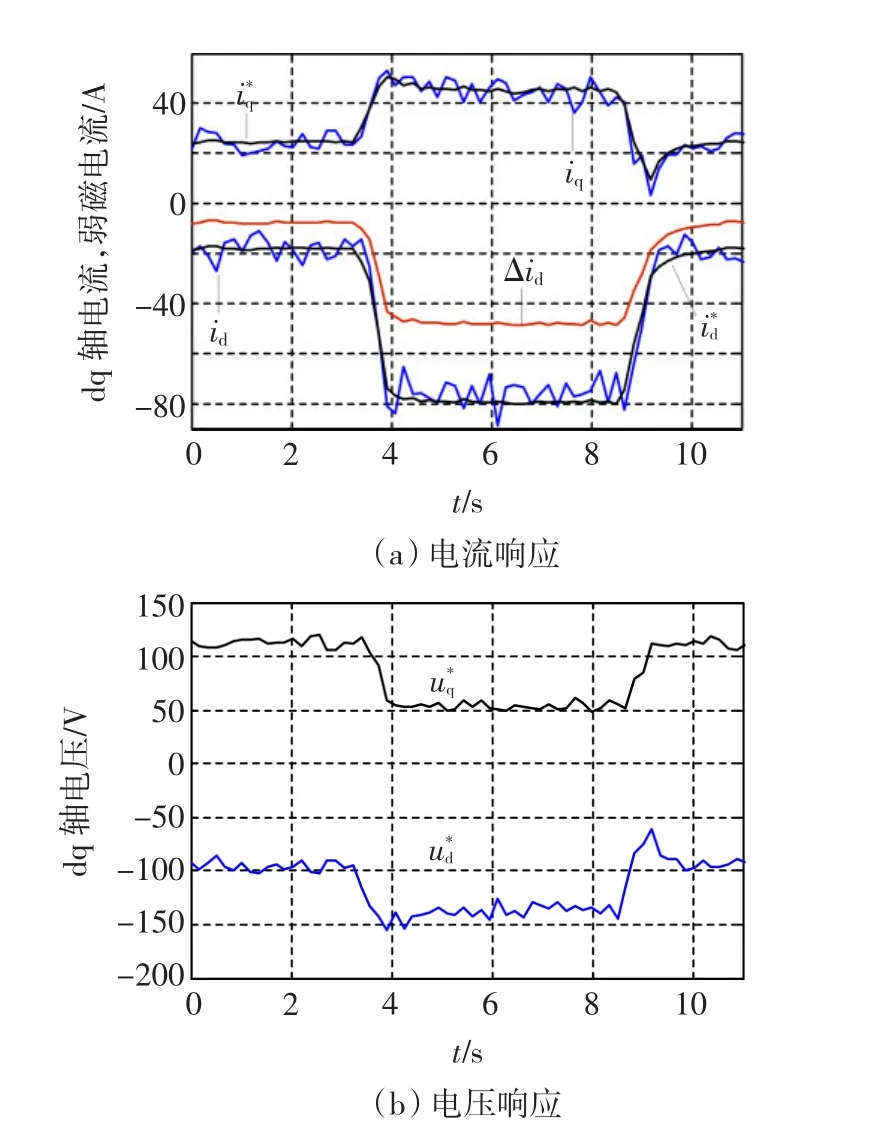
图11 转速在4 000 r/min转矩在13 N·m和46 N·m之间阶跃时的电流和电压响应Fig.11 Current and voltage responses with torque steps between 13 N·m and 46 N·m at 4 000 r/min
4 结论
1)本文探究了PMSM在电动弱磁工况下动态性能不佳的根本原因:q轴电流调节器作用与系统期望相反。
2)本文提出的弱磁策略消除了PMSM在电动工况下弱磁区动态过程中的电流震荡,提高了PMSM动态性能。
3)该策略使PMSM不但具有抑制VSI和电流调节器饱和的功能;而且具有基于电压反馈的弱磁策略的稳态性能、弱磁扩速能力和输出转矩能力。
4)将该策略用于电动汽车中的PMSM驱动控制系统,能改善电动汽车高速行驶时的动态性能。
[1]唐朝辉,丁强,喻寿益,等.内埋式永磁同步电机弱磁控制策略[J].电机与控制学报,2010,14(5):68-72.TANG Zhaoyi,DING Qiang,YU Shouyi,et al.Research of flux weakening strategy of interior permanent magnet synchronous motor[J].Electric Machine and Control,2010,14(5):68-72.
[2]盛义发,喻寿益,桂卫华,等.轨道车辆用永磁同步电机系统弱磁控制策略[J].中国电机工程学报,2010,30(9):74-79.
SHENG Yifa,YU Shouyi,GUI Weihua,et al.Field weakening operation control strategies of permanent magnet synchronous motor for railway vehicles[J].Proceedings of CSEE,2010,30(9):74-79.
[3]TURSINI M,CHIRICOZZI E,PETRELLA R.Feedforward fluxweakening control of surface-mounted permanent-magnet synchronous motors accounting for resistive voltage drop[J].IEEE Transactions on Industrial Electronics,2010,57(1):440-448.
[4]KWON TS,SUL SK.Novel antiwindup of a current regulator of a surface-mounted permanent-magnet motor for flux-weakening control[J].IEEE Transactions on Industry Applications,2006,42(5):1293-1300.
[5]KWON TS,CHOI GY,KWAK MS,et al.Novel flux-weakening control of an IPMSM for quasi-six-step operation[J].IEEE Transactions on Industry Applications,2008,44(6):1722-1731.
[6]YOO A,SUL SK,KIM H,et al.Flux-weakening strategy of an induction machine driven by an electrolytic capacitor-less inverter[J].IEEE Transactions on Industry Applications,2011,47(3):1328-1336.
[7]ZHANG Y,XU L,GUEVEN MK,et al.Experimental verification of deep field weakening operation of a 50-kw IPM machine by using single current regulator[J].IEEE Transactions on Industry Applications,2011,47(1):128-133.
[8]ZHU Lei,XUE Shan,WEN Xuhui,et al.A new deep fieldweakening strategy of IPM machines based on single current regulator and voltage angle control[C]//Proceedings of the 2nd Annual IEEE Energy Conversion Congress and Exposition,September 12-16,2010,Atlanta,USA.2010:1144-1149.
[9]TURSINI M,CHIRICOZZI E,PETRELLA R.Feedforward fluxweakening control of surface-mounted permanent-magnet synchronous motors accounting for resistive voltage drop[J].IEEE Transactions on Industrial Electronics,2010,57(1):440-448.
[10]LIN PY,LAI YS.Novel voltage trajectory control for flux weakening operation of surface mounted PMSM drives[C]//IEEE Industry Applications Society Annual Meeting,October 5-9,2008,Alberta,Canada.2008:1-8.
[11]LIN PY,LAI YS.Novel voltage trajectory control for field-weakening operation of induction motor drives[J].IEEE Transactions on Industry Applications,2011,47(1):122-127.
[12]于家斌,秦晓飞,郑军,等.一种改进型超前角弱磁控制算法[J].电机与控制学报,2012,16(3):101-106.
YU Jiabin,QIN Xiaofei,ZHENG Jun,et al.Improved leading angle flux weakening control algorithm[J].Electric Machine and Control,2012,16(3):101-106.
[13]何亚屏,文宇良,许峻峰,等.基于多模式SVPWM算法的永磁同步牵引电机弱磁控制策略[J].电工技术学报,2012,27(3):92-99.HE Yaping,WEN Yuliang,XU Junfeng,et al.High-power permanent magnet flux-weakening strategy based on multi-mode SVPWM[J].Transactions of China Electrotechical Society,2012,27(3):92-99.
[14]朱磊,温旭辉,赵峰.永磁同步电机弱磁失控机制及其应对策略研究[J].中国电机工程学报,2011,31(18):67-72.
ZHU Lei,WEN Xuhui,ZHAO Feng.Control policies to prevent PMSMs from losing control under field-weakening operation[J].Proceedings of CSEE,2011,31(18):67-72.
[15]ZHU Hao,XIAO Xi,LI Yongdong.PI type dynamic decoupling control scheme for PMSM high speed operation[C]//Proceedings of the Applied Power Electronics Conference and Exposition,February 21-25,2010,California,USA.2010:1736-1739.