斜桩定位算法的研究及应用
2014-08-16马保卫
马保卫
(测绘出版社,北京100045)
一、引 言
无论是在码头还是桥梁工程中,桩基都是一个重要的组成部分,其定位的精度将直接影响工程的质量。为使定位工作顺利进行,需要测量人员利用仪器指挥作业船只移动到设计沉桩位置。目前,近岸时比较常规的做法有:① 全站仪坐标法,即在打桩船上安装固定棱镜,建立3~4个固定点,经坐标转换后,通过控制这些固定点达到间接完成桩基定位的目的[1];② 前方交会法,即利用桩心设计坐标与岸上控制点的位置关系,求出左右切点的观测角,并通过3台全站仪实时控制打桩船的移动,以完成桩基定位。离岸较远时可以利用基于GPS RTK技术的打桩定位系统,直接控制打桩船移动到桩的设计位置。但该系统也有许多不足之处,对贯入度、桩顶标高等的控制还有待完善。
利用常规方法进行桩基定位时,直桩的计算方法比较简单,且计算精度高,完全能够满足工程需要。但对于斜桩,由于定位数据采用的是近似算法,精度受到一定的影响,对工程质量有一定的影响,因此有必要对斜桩定位数据的计算方法作进一步的研究,以提高放样的精度,从而保证工程的施工质量。
二、 直桩、仰俯桩定位原理
如图1所示,测站坐标、桩心设计坐标和桩的半径已知,以此可以计算出测站到桩心的方位角,并可以计算出小夹角(即测站和桩心的连线与切线之间的夹角),此时可以得到测站和桩之间的左、右切方位角。在放样时,同时在3个测点上架设经纬仪或全站仪,将水平角度调到待放桩的左或右切方位角上,然后指挥作业船只移动。其中,两台仪器起控制作用,一台仪器起校核作用,以防止出现定位错误。
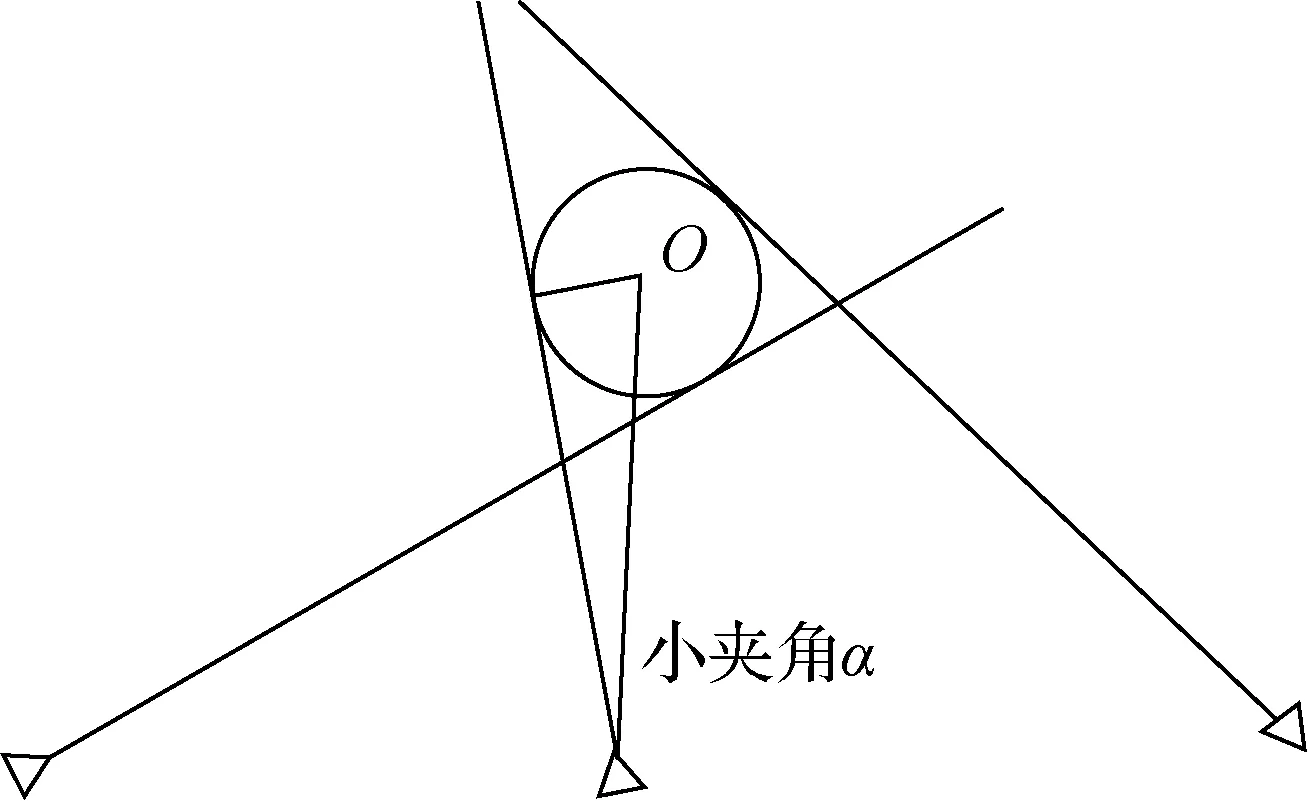
图1 利用前方交会对管桩定位的原理
桩的定位精度主要受交会角度、距离等因素的影响[2]。由于直桩的中心线平面位置不变,因此竖直角的改变不会影响平面定位的结果。通常是将两台仪器的竖直角固定在设计标高或控制标高的位置,以控制桩的标高;另外一台仪器随时检查桩的垂直度情况。
对于斜桩的定位,传统的方法是在控制平面处按照直桩进行放样数据的计算,该方法忽略了桩倾斜和船尾扭动后控制截面变成椭圆的现实[3],从而给放样数据带来计算误差。
对于仰桩
(1)
对于俯桩
(2)
求出新的桩心坐标后,按照直桩的计算方法(即将控制截面近似为圆形)计算左、右切方位角。
三、 仰俯桩定位精密算法
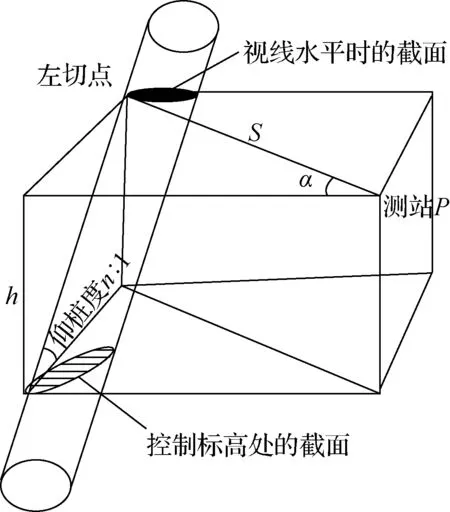
图2 斜桩改进算法示意图
(3)
(4)
在该坐标系下建立切线方程和椭圆方程组
(5)
式中,短半轴b为桩的半径r;长半轴a=r/sin(arctann)。
测站P到左切点的方位角α=arctan((y1-yp)/(x1-xp)), 视线从水平移动到控制标高处变动的角度α0=arcsin(h/nS)。其中,h为提高量;n为仰俯比例;S为测站和水平左切点之间的距离。
此时,控制标高位置的左切方位角α′=α±α0,俯桩时为“+”,仰桩时为“-”。
四、应用实例
在某工程中,对斜桩利用传统的近似算法和本文改进后的算法分别进行计算,计算结果见表1。
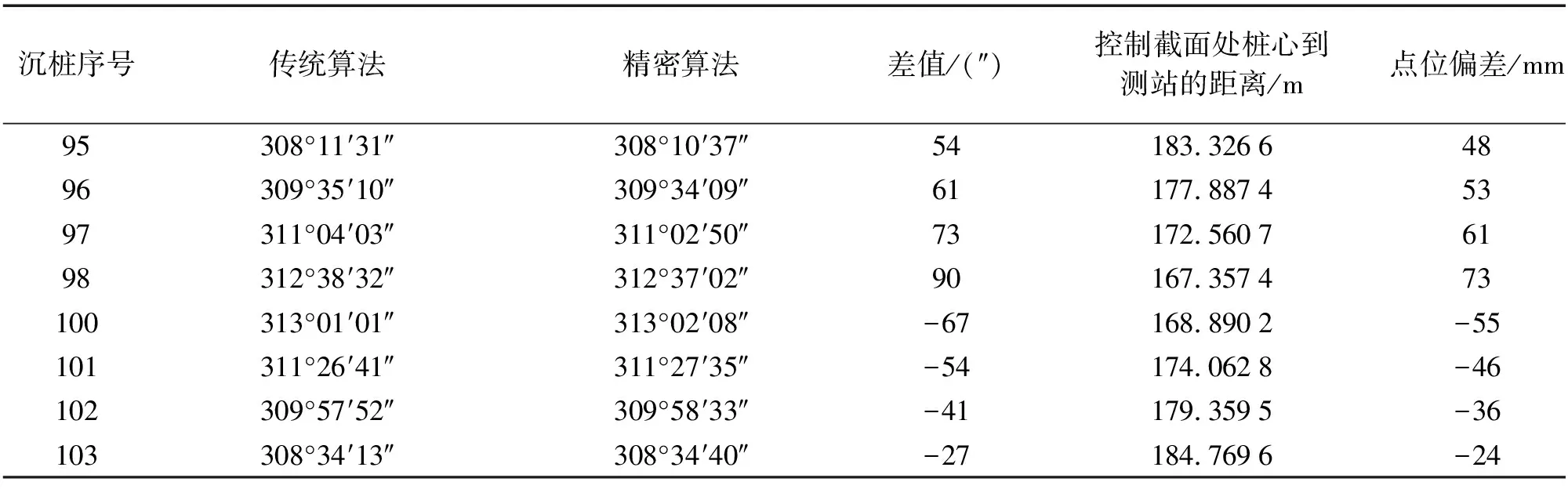
表1 两种方法计算结果对照表
从表1可知,传统算法与精密算法在放样角度上存在较大的差异,由此引起的桩位偏差也较大(最大已达到73 mm),而桩基工程规范规定,桩位误差一般不应大于100 mm。考虑到放样过程中其他因素的影响,最后的桩位误差很有可能超出规范的规定,更有可能因为误差过大需要报废已经完成的桩基,从而造成人力、物力的浪费。而精密算法则能有效地提高计算精度,从根本上保证了桩基定位的质量。
五、结束语
由于传统的斜桩放样数据计算方法将椭圆近似
为圆形来处理,使得计算结果存在较大的偏差,这种偏差随着距离的增大而增大,并且与船尾的扭角、桩的倾斜度有关。精密算法有效地提高了计算精度,解决了放样数据存在偏差的问题,保证了沉桩质量。虽然其计算过程比较复杂,但是通过编程可以轻松实现,具有一定的应用价值。
参考文献:
[1] 刘绍堂,王志武,赵站杨.杭州湾跨海大桥水上桩基定位测量技术[J].铁道建筑,2006(5):25-27.
[2] 曹海林.码头施工打桩定位测量的精度分析[J].江苏测绘,2001(2):18-20.
[3] 吴杰明.浅谈高桩码头沉桩施工有关测量问题[J].珠江水运,2006(2):69-71.
