基于神经网络集成的遥感图像分类与建模研究
2014-08-16吕京国
吕京国
(1. 北京建筑大学 测绘与城市空间信息学院,北京 100044;2. 现代城市测绘国家测绘地理信息局重点实验室,北京 100044)
一、引 言
随着遥感信息广泛地应用于农业生产、灾害评估与资源探测等领域,分类技术也成为遥感影像信息分析中的重要研究方向。面向高分辨率影像信息的分类技术层出不穷,不仅体现在以最小距离分类为代表的监督分类技术,以ISODATA分类法为代表的非监督分类技术,还包括逐渐成熟的神经网络技术,也在遥感领域中得到全面应用。
遥感影像分类本身作为一种非线性问题的求解,满足其解的方法在人工智能领域得到了验证。神经网络作为人工智能领域的一种从低维空间到高维空间映射的方法,它以一定的数学模型描述生物神经网络的结构,以一定的算法模拟生物的行为,解决了传统算法所面临的智能信息处理问题。BP、RBF和Hopfield等神经网络应用于遥感影像分类中,体现了神经网络分布式存储、并行处理和自学习与自组织等功能。
针对特定的遥感影像,不同类型的神经网络分类器精度不同,而且同一个神经网络分类器对不同类别的分类精度也不同。一些神经网络分类器对一部分类别的分类精度高,而另一些神经网络分类器只对另一部分类别的分类精度高,从而不同的神经网络分类器之间可能有一定的互补性。因此,利用这种特性集成的神经网络便有可能提高遥感影像的分类精度。本文分别研究了BP、RBF和Hopfield神经网络的特性,构造异构网络参与影像信息的分类,并以生成个体网络的Bagging和Boosting算法作为集成方式,投票来决定最终的分类结果。
二、影像分析理论与神经网络理论
1. 影像分析
为了提供分类所需要的影像信息类型,影像分析以特征提取与特征选择作为基础。影像的灰度值代表地表信息的辐射值,高分辨率影像反映了更加精细的地表信息。应用于地物分类的影像含有不同类型的地物,需要选择一定的特征代表不同类型的地物,并以一定的方法将特征所对应的空间划分为不同的子空间,以使影像中代表各类地物的像元归为相对应的子空间。
针对高分辨率影像结构信息丰富的特点,进行遥感影像分类时,既要考虑影像的灰度信息,也要顾及影像的结构信息,应选择不同的特征反映以上要求。目前,常用的特征包含均值、方差、能量、对比度、熵、相关性和均质度等[1]。采用光谱信息与结构信息等多种特征相结合的方法,可以充分地利用影像灰度分布的信息,改善影像分类的效果。
2. BP、RBF和Hopfield神经网络
遥感影像分类作为人工智能领域中模式识别的一种应用方向,其问题的解决需要利用以人类思维方式为基础的信息处理技术。而作为具有大规模并行处理、容错性自组织和自适应能力等特点的人工神经网络,已成为解决遥感影像分类问题的有力工具。
神经网络作为一种并行处理连接网络,以多个互联的神经元为基本处理单元,构建了具备信息存储与信息计算能力的数学模型,抽象地模拟人脑智能行为[2]。目前,应用于遥感影像分类的神经网络模型有BP网络、RBF网络和SOM自组织特征映射模型。BP网络是一种多层前向型神经网络,采用最小均方差的学习方式,其神经元的传递是S型函数,输出量为0~1的连续量,权值的调整采用反向传播算法,它可以实现从输入到输出的任意非线性映射[3]。RBF网络也是一种三层前向型网络,采用多种学习方法,如最小正交二乘学习算法和K均值学习算法等,其神经元的传递为高斯函数,确定中心和宽度后,其输出权值可经解线性方程组得出,它可以实现学习速度的加快,以及可以避免局部极小值。Hopfield是一种由非线性元件构成的全连接单层反馈系统,输入层接收数据,网络产生不断的变化,输出反馈到输入从而产生新的输出,达到一个能收敛的稳定网络[4]。以上3种网络的神经元模型分别如图1(a)—图1(c)所示。
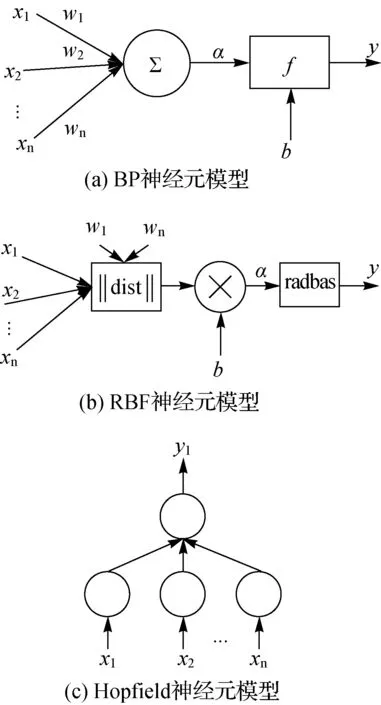
图1 3种神经网络的神经元模型
3. Bagging和Boosting算法
为了使不同的神经网络应用于遥感影像的分类,以达到提高分类精度的目的,因此考虑采用神经网络集成的方法。这种具有误差互不相关的神经网络集成方法,一方面可以提高分类精度,另一方面也具有较强的泛化能力[5]。
面对遥感影像分类问题,将训练样本操作的整个问题域划分为子问题,每一个子问题采用Bagging或Boosting算法技术的集成实现。针对不同分类器所求解子问题域的输出,则采用投票或决策融合的方式集成求解[6]。
在神经网络集成中,当确定了构成集成的个体神经网络结构和输出合成的方法后,便需要应用一定的个体网络构建方法训练多个神经网络。Bagging和Boosting算法为个体网络生成中最重要的技术[7],Bagging算法思想是对训练集采用独立、随机和有放回地抽取训练样本,为每一个基分类器都构造出一个与训练集同样大小但内容不同的训练集,以训练出不同的基分类器,从而得到一个性能改进的组合分类器。Boosting算法思想是学习一系列分类器,每一个训练样本被赋予一个权值,每学习完一个分类器,就增加被分类器错误分类的训练样本的权重,当所有的分类器学习完并且达到迭代次数,便可综合得出一系列分类器。
三、试验过程
1. 数据分析
本文采用江苏常州市地区的航空高分辨率影像,经过大气校正处理,研究区域选取500像素×500像素大小,试验数据为红绿蓝3个波段,并提取灰度特征与纹理特征作为分类特征空间,通过目视判读将影像中的地表类型分为水体、农地、林地与建筑物。
分类的精度提高,受各分类器分类误差不相关性影响较大。不同的波段对分类结果的影响不同,不同的特征选择也影响分类的效果,它们同时制约着分类器分类的误差相关性。试验中所采用的特征为红绿蓝3个波段,以及任选波段的均值、方差、能量、对比度、熵、相关性和均质度。分类精度评价指标包含总体精度、用户精度、生产者精度、Kappa系数。原始图像区域如图2所示。

图2 原始图像区域
2. 试验分析
(1)单分类器试验
面向多个神经网络分类器,分别选取一定数量的训练样本与测试样本进行影像分类,利用精度评价指标分析不同特征选择下每一个分类器对不同类别的分类精度,为集成分类器的精度评价提供参考。
为了验证不同类型特征下不同分类器对不同分类类别的影响,试验分为两种情况,第一种情况采用3个波段及任选波段的均值与方差,分别进行BP、RBF和Hopfield分类器分类的试验(如图3所示);第二种情况采用3个波段及任选波段的均值、方差、能量、对比度、熵、相关性和均质度,也分别进行与第一种情况相似的分类试验(如图4所示),表1为单分类器分类结果精度评价。

图3 第一种情况单分类器分类结果(5个特征)
从分类结果图和分类结果精度评价表可以看出,第二种情况的总体分类精度稍微高于第一种情况的总体分类精度,表明增加特征能更加合理地表达图像类别信息。每一种情况内部不同分类器的总体分类精度差别不大,说明不同的神经网络分类器在特征相同的情况下,对于总体分类精度的影响并不显著。针对同一种分类器,一种试验情况内不同类别的分类精度存在较大差别,体现了不同的地物类别所受分类器的影响显著。
(2) 集成的分类器试验
单分类器分类表明分类特征影响同类分类器分类的精度,不同的分类器精度也略有差别。可以从特征与分类器的选择角度,对于特征的独立性与分类器的差异性特点,以集成的方式去构建分类器来提高分类的精度。试验数据选择单分类器试验所给定的训练样本,采用Bagging和Boosting算法构造不同的训练特征集,进一步构造参与分类的特征空间,并选择BP、RBF和Hopfield的神经网络参与个体网络的生成,对于网络输出以投票的方式决定最后分类的结果。神经网络集成采用如图5所示的集成方式。试验结果如图6所示,精度评价如表2所示。
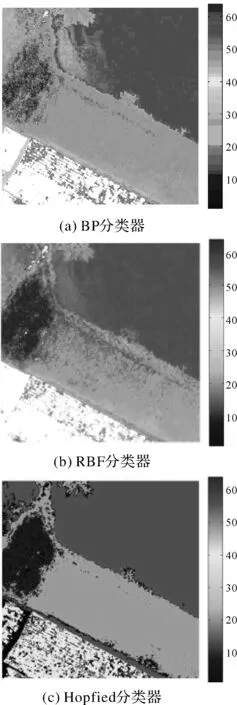
图4 第二种情况单分类器分类结果(9个特征)
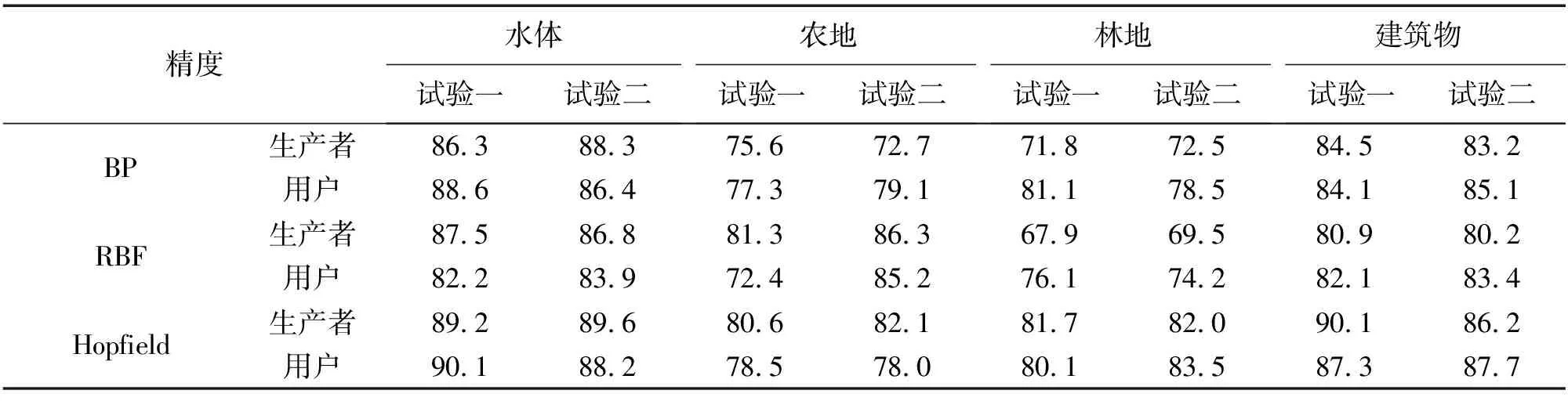
表1 单分类器分类结果精度评价表 (a)两种试验情况下,不同分类器下不同类别的生产者和用户精度 (%)

(b)两种试验情况下,不同分类器的总体分类精度评价
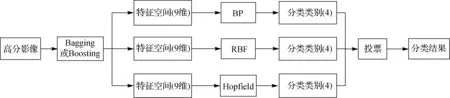
图5 神经网络集成示意图
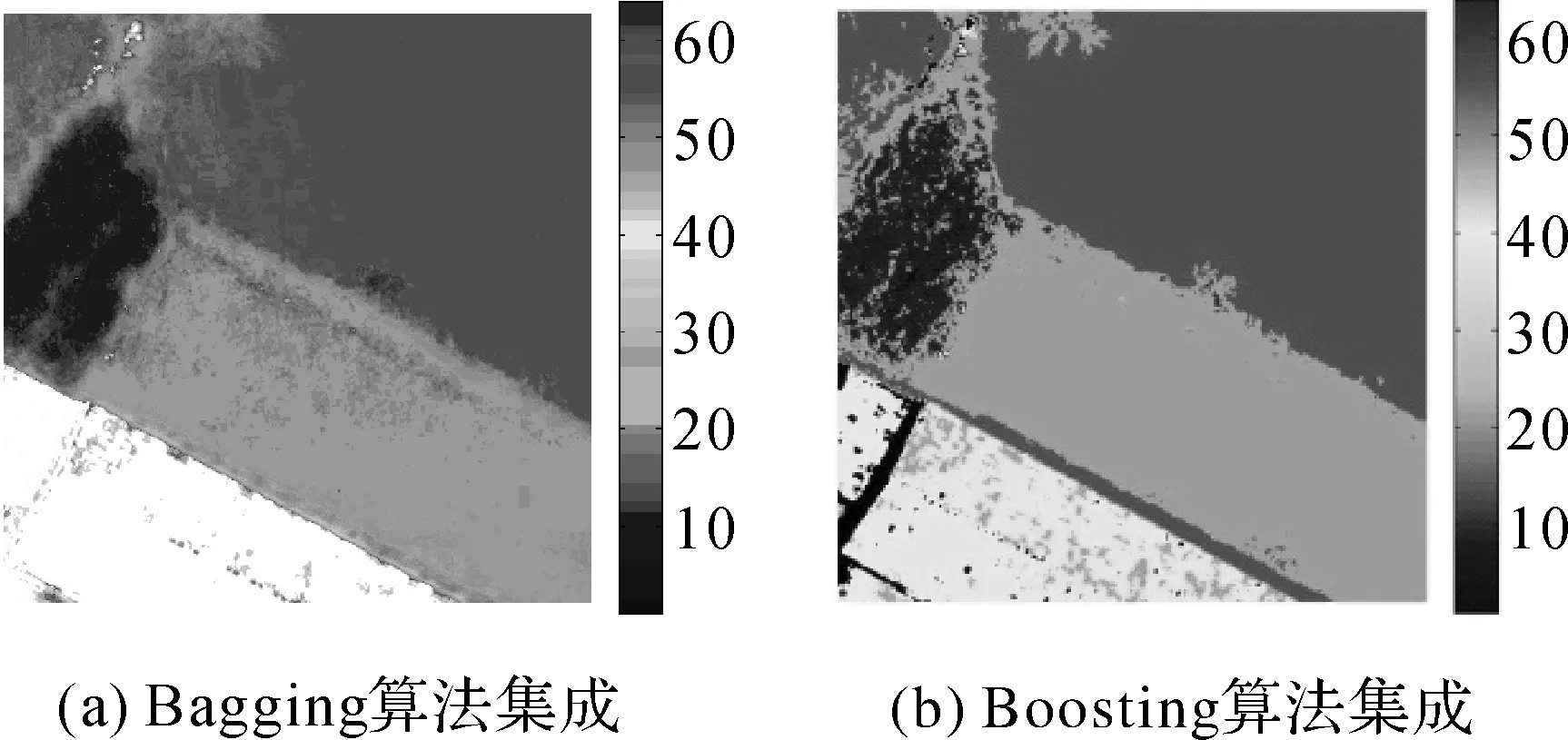
图6 神经网络集成分类结果图
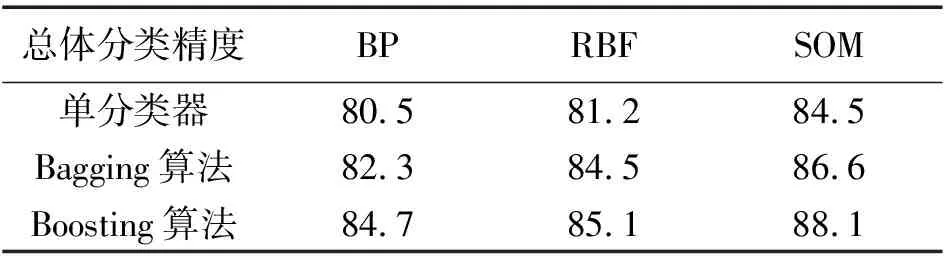
表2 神经网络集成分类结果精度评价表 (%)
根据试验结果,并将集成的分类结果与单分类器分类结果作对比,可以看出神经网络集成的分类器总体分类精度高于单个分类器的分类精度。神经网络集成中采用Hopfield算法的分类精度显著提高了整体分类精度。采用Boosting算法集成的分类器分类精度优于Bagging算法集成的分类器分类精度。
四、建模研究
面向高分辨率遥感影像分类的应用研究,神经网络集成建模分析主要以数据的预处理、网络模型的构建等方面为基本内容。
为了消除不同量纲网络输入对分类精度的影响,可采用比例压缩法对网络输入的特征空间进行归一化处理,并对网络训练后输出的数据,进行反方向的处理。
BP和RBF网络隐含层神经元的数目,采用直方图分析法确定,输入层神经元的数目为9,输出神经元的数目即为所要分类的数目4。BP网络的训练次数人工设为500,训练目标为0.001,隐含层函数采用S型正切函数,输出层采用Sigomoid函数。RBF网络的训练目标为0.001,其宽度采用固定法确定。Hopfield网络的训练次数人工设为200,训练目标为0.001,输入层的神经元数目为9,输出层神经元数目为10×4。Bagging算法和Boosting算法分别按照其流程进行以上3个分类器的集成,所集成的神经分类器特点为复杂度高。
五、结束语
本文将神经网络集成技术应用于高分辨率影像信息分析与建模,以航空遥感影像作为研究对象,分别进行了神经网络单分类器分类试验、神经网络集成的分类器分类试验,并比较了神经网络单分类器分类精度与神经网络集成的分类精度。通过研究可以发现,针对神经网络单分类器应该选择更全面地表达影像信息的特征集合,以提高遥感影像的分类精度,进一步研究表明神经网络集成分类器的精度优于神经网络单分类器。
研究结果表明,选取具有代表性样本的前提下,选择多个神经网络分类器,并采用Bagging算法和Boosting算法应用于高分辨率影像分类,就可以在一定程度上提高影像分类的精度,对于实用化高分辨率影像分类具有较强的推广性。
参考文献:
[1] 贾永红. 数字图像处理[M].武汉:武汉大学出版社, 2003.
[2] 钟珞,饶文碧,邹承明. 人工神经网络及其融合应用技术[M].北京:科学出版社, 2007.
[3] 陈绍杰,逄云锋. Boosting和Bagging算法的高分辨率遥感影像分类探讨[J]. 测绘科学,2010,35(5):169-172.
[4] 董广军,张杰,徐铭杰,等. 基于Hopfield 神经网络模型的遥感影像分类算法[J]. 测绘学院学报, 2003,20(4):267-270.
[5] 傅强. 选择性神经网络集成算法研究[D].杭州:浙江大学, 2007.
[6] 柏延臣,王劲峰. 结合多分类器的遥感数据专题分类方法研究[J]. 遥感学报, 2005,9(5):555-563.
[7] 史忠植. 神经网络[M].北京:高等教育出版社, 2009.
