基于智能全站仪的机载精密三角高程测量系统设计与实现
2014-08-16邹进贵朱勇超徐亚明
邹进贵,朱勇超,徐亚明
(1. 武汉大学 测绘学院,湖北 武汉 430079; 2. 精密工程与工业测量国家测绘地理信息局重点实验室,湖北 武汉 430079)
一、引 言
三角高程测量方法观测简单、灵活,受地形限制较小,但是由于仪器的精度限制和大气折光、地球曲率等因素的影响,三角高程测量的精度问题一直是制约其发展的瓶颈问题。近年来,随着测绘技术的进步及测量仪器的发展,尤其是高精度测量机器人的出现,三角高程测量的精度在理论上有了新的提升空间。许多专家相继提出了三角高程测量代替高等级水准测量的可能,笔者通过利用两台高精度测量机器人,经加装改进,实现了同时对向观测,削弱了大气折光、地球曲率等因素的影响。通过对测段按偶数边进行观测,无需量取仪器高和觇标高,有效避免了由此带来的测量误差,可以达到二等水准测量的精度要求。
二、精密三角高程测量观测方程
1. 仪器对棱镜单元的观测方程
图1为仪器观测棱镜单元的示意图,P1、P2两点的高程分别为H1和H2。
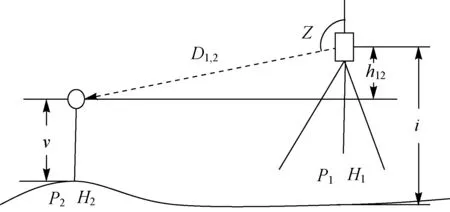
图1 仪器观测棱镜示意图
由佩利年在《理论大地测量学》中提出的严密计算公式可得P1、P2点的高差的计算公式为

(1)
式中,D1,2为P1点观测P2点的斜距;Z为P1点对P2点观测的天顶距;i为仪器高;v为目标高;ε1为照准方向上的垂线偏差分量;εc为测线沿线垂线偏差分量均值;K1为P1到P2点的积分折光系数;S为P1、P2点经气象改正后的斜距在参考椭球上的投影;R为P1、P2点的平均曲率半径;B1、B2、Bm分别为P1、P2的纬度和平均纬度。
整理式(1),可得

即

(2)
式中,h12为仪器物镜中心到棱镜中心的高差。
2. 仪器对仪器单元的观测方程
如图2所示,P1、P2两点的高程分别为H1和H2。
P1、P2点的高差的计算公式为
(3)

图2 对向观测示意图
式中,D1,2、Z1,2分别为P1观测P2点低棱镜所获得的斜距和天顶距;D2,1、Z2,1分别为P2观测P1点低棱镜所获得的斜距和天顶距;Δd1、Δd2分别为P1、P2点两处仪器的棱镜互差。令ΔP1、ΔP2分别为相应的两处仪器低棱镜中心至仪器中心的距离,h12为P1点仪器中心到P2点低棱镜中心的高差,h21为P2点仪器中心到P1点低棱镜中心的高差,h1,2为P1仪器中心到P2仪器中心的高差,于是有
h1,2=(H2+i2)-(H1+i1)=ΔP1-h21=h12-ΔP2
(4)
将式(4)代入式(3),可得

(5)
若i为偶数,则

Di,i-1cosZi,i-1)-Mi-1,i-Ni-1,i
(6)
若i为奇数,则

Di,i-1cosZi,i-1)-Mi-1,i-Ni-1,i
(7)
3. 总观测方程
精密三角高程测量高程传递过程如图3所示。

图3 高程传递示意图
根据仪器对棱镜观测单元和仪器对仪器对向观测单元的推导,可以得出精密三角高程测量总的观测方程为

B0)2cos2B1,0-(Bn-Bn-1)2cos2Bn,n-1]
(8)
式中,第一项为概略高差;第二项为转点改正项;其余为起、末点改正项。
三、机载精密三角高程测量系统设计
为了保证高质量、高效、便捷地完成测量任务,系统必须具备良好的性能。首先要求利用该系统进行高程测量,须满足国家二等水准测量的精度要求;其次要求野外观测值必须实时得到记录和基本解算,以免在出现故障时丢失数据;最后从系统开发角度出发,该系统必须具有良好的用户接口,能够方便地进行移植,而且当用户进行不当操作时,该系统能够进行相应的错误处理,给予提示或警告,且不影响系统正常运行。
考虑到该系统将用于野外数据采集且数据处理需要两台仪器的数据,因此系统将分为两个部分:数据采集单元和数据解算单元。数据采集单元运行于智能全站仪上;数据解算单元运行于PC机上。
1. 数据采集单元
笔者运用Geo C++开发语言,在TS30测量机器人平台上设计并开发了机载精密三角高程测量数据采集程序。数据采集单元集成了多测回自动观测、数据自动检核、自动重测、数据预处理、数据评定等功能,可使外业数据采集更加高效和便捷。
数据采集程序执行自动化测量的函数调用机制如图4所示。通过按下“测量”功能键启动测量,测量完成即自动重载OnTargetPointMeasFinished()获取观测值并且在该函数中启动下一次测量。
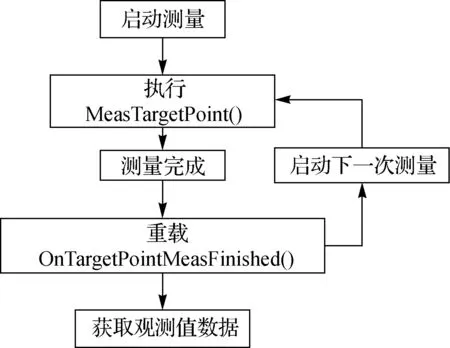
图4 自动测量过程函数调用机制
2. 数据解算单元
本测量系统的数据解算单元运行于PC机上,该单元利用C++语言编写,可以运行在Windows 7/XP/2000/98等操作系统下。将两台仪器的观测数据拷贝到PC机上后可以直接利用该程序进行解算,获取数据结果并且对数据结果进行精度评定。该单元主要包括项目管理、数据导入与数据预处理、数据查看、数据计算、解算结果输出等功能。
四、机载精密三角高程测量系统实现
1. 数据采集软件的实现
笔者运用Geo C++开发语言,在机载开发平台上进行了系统开发。机载精密三角高程测量系统菜单选项实现主界面如图5所示。
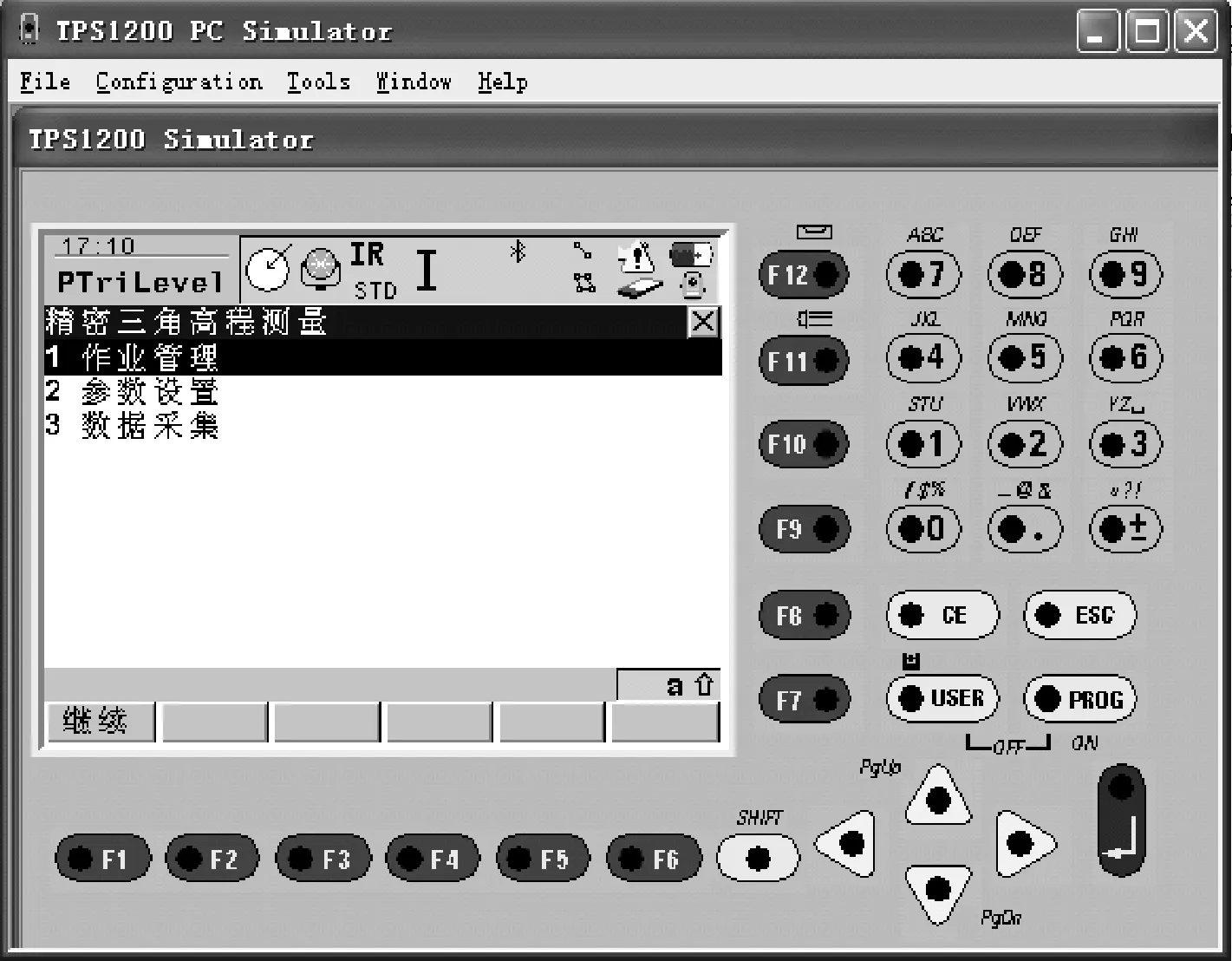
图5 程序菜单选项主界面
(1) 作业项目的管理
根据系统的设计,该单元的主要功能是新建作业、选择已有作业及删除作业的功能,并且在指定路径下创建初始观测值文件。作业项目管理实现界面如图6所示。
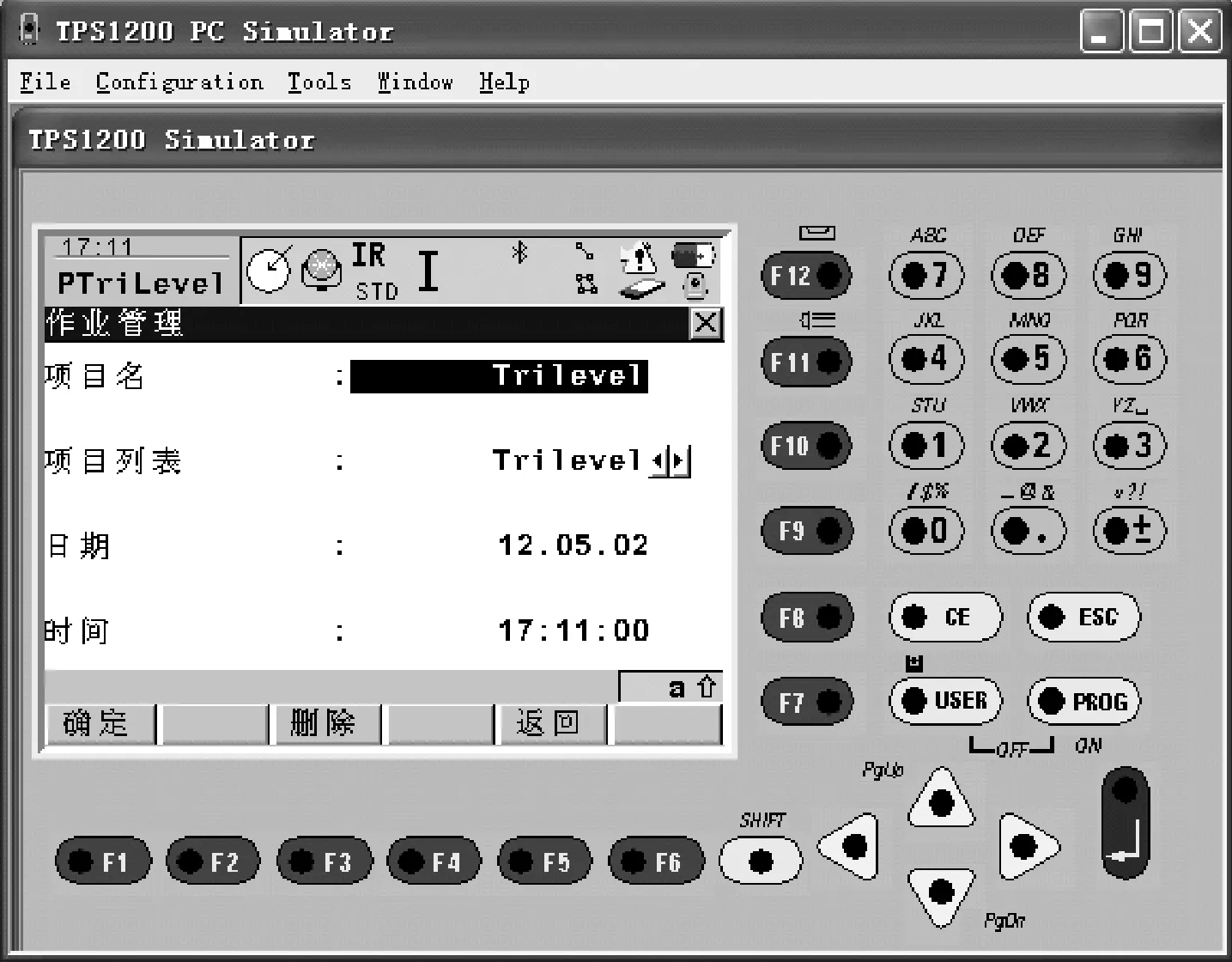
图6 作业管理程序界面
(2) 测量参数的设置
参数设置包含3个页面,在参数设置单元,利用Geo C++的Tabbed页面形式,参数设置实现界面分别如图7所示。

图7 测量参数设置界面
(3) 数据采集的控制
数据采集是机载程序实现的主要功能,也是机载程序设计的目的。为了实现数据采集的自动化,进行多测回自动化观测、数据自动检核及自动存储等功能,笔者在软件设计的基础上,利用Geo C++开发语言实现了该单元。系统实现自动搜索、自动照准、自动测量的部分源代码如图8所示。

图8 自动测量部分源代码
数据采集功能实现如图9所示。其中,图9(a)主要控制测量流程、显示测量进度并且集成高低棱镜数据检核功能;图9(b)主要进行自动化观测,而且集成棱镜单元观测数据检核功能。

图9 数据采集界面
2. 数据处理软件
数据处理软件采用C++语言在Visual Studio 2010平台上进行开发,主要实现项目管理、数据的导入导出、数据预处理、数据查看、结果输出等功能。
五、系统的应用
按照精密三角高程测量的理论,对两台装载有笔者开发的机载精密三角高程测量软件PTriLevel的全站仪进行必要的加装。并配备一套可以安装高低棱镜的棱镜杆,在某地区进行了实际应用,路线如图10所示。

图10 路线图


表1 测段高差成果表


表2 闭合环成果表
经过计算,本次测量每千米偶然中误差计算结果为0.48 mm,符合国家二等水准测量的精度要求。
六、结束语
笔者设计并开发了基于徕卡智能全站仪的机载精密三角高程测量数据采集软件,提高了工作效率。其中数据采集模块多测回自动观测、数据检核、自动重测等功能,大大提高了野外数据采集效率。该软件的设计思路不仅适用于精密三角高程测量,也同样适用于其他测量系统的设计,为下一步研究的开展打下了基础。
参考文献:
[1] ZHANG Zhenglu, ZHANG Kun, DENG Yong, et al. Research on Precise Trigonometric Leveling in Place of First Order Leveling[J].Geo-spatial Information Science, 2005(4): 235-239.
[2] LUO Changlin, ZHANG Zhenglu, MEI Wensheng, et al. Teaching Practice of Automatic Measurement with Georobot[R]. Hong Kong: FIG Working Week, 2007.
[3] 周建林,岳东杰.全站位竖直高程传递技术及其在苏通大桥测控中的应用[J].土木工程学报,2007,40(5):100-104.
[4] CEYLAN A, BAYKAL O. Precise Height Determination Using Leap-frog Trigonometric Leveling[J].Journal of Survey Engineering, 2006,132(3): 118-123.
[5] 梅文胜. 测量机器人开发与应用[M]. 武汉:武汉大学出版社,2011: 49-55.
[6] 张艳,高飞,李晓莉. 应用精密三角高程测量实现跨河水准的研究[J]. 合肥工业大学学报:信息科学版,2007,30(10): 1345-1348.
