制浆造纸废水pH值测试控制系统的应用
2014-08-10汤瑜杰
胡 勇 汤瑜杰 陆 伟
(1.无锡荣成纸业有限公司,江苏无锡,214187;2.浙江景兴纸业有限公司,浙江平湖,314214)
浙江景兴纸业股份有限公司 (以下简称景兴纸业)为保证生产过程中废水处理能力达到环保局排放要求,从2010年下半年就开始筹备对原有废水系统的改造升级。现就改造过程中对pH值的控制系统做一个分析。实际上,废水处理的中和过程具有较高的控制难度[1],有以下2方面的原因:①中和反应存在严重的非线性,中和点附近增益极高,难以建立过程的辨识数学模型;②中和过程为弱酸和中强碱在露天流动的过程中反应,其过程易受本身化学成分、是否含杂质、外界温度变化等影响。所以采用常规PID[2]对pH值进行精确控制难以取得很好的控制效果,这也成为工业自动化中较薄弱的环节之一。为此,pH值被公认为是最难控制的变量之一[3]。与常规PID控制方法相比,模糊自适应PID控制具有不建立数学模型、响应快、超调小、较好的动态响应品质和鲁棒性好的特点。本文将模糊自适应PID算法与西门子S7-300结合,实现对IC厌氧反应塔内部的pH值控制,达到满意的效果。
1 废水处理IC厌氧反应塔工作原理
为了保证IC厌氧反应塔中厌氧污泥的反应环境,需要酸碱适中。在IC厌氧反应塔入口和出口都有一个pH值变送器,通过检测出口的pH值来保证IC厌氧反应塔内部的反应环境。根据工艺需要,IC厌氧反应塔内部污泥的最佳反应环境为弱酸性,当pH值>7时,自动启动酸计量泵;当pH值<7时,自动启动碱计量泵,以维持pH值为弱酸性,废水处理流程如图1所示。模糊控制器输出的控制量信号作用于相应的执行器,可实现不同类型废水的中和处理。
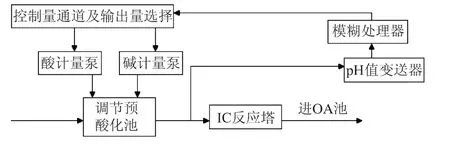
图1 废水处理流程图
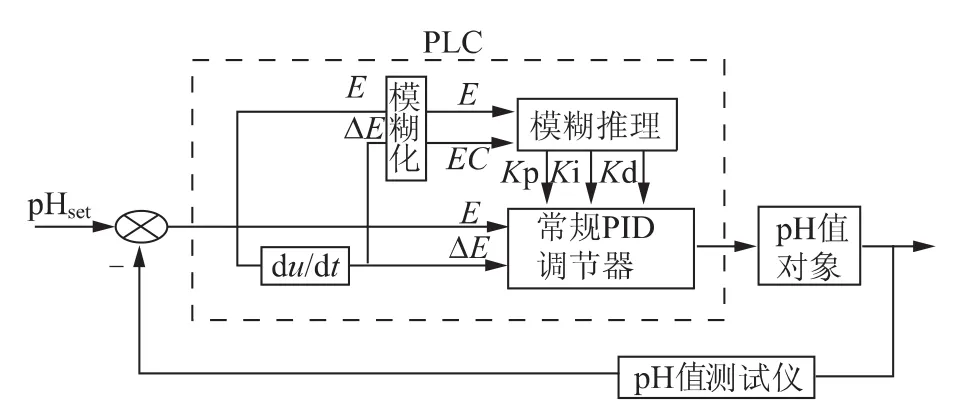
图2 模糊自整定PID控制器结构
2 模糊自适应PID控制器工作原理及设计[4-6]
2.1 pH值模糊PID控制原理
在普通PID控制器上加入模糊控制环节,通过模糊规则调整系统的PID参数,构成模糊PID控制器,实现对Kp、Ki、Kd自动调节。
自适应PID控制器以偏差E和偏差变化EC作为输入,可以满足不同时刻的E和EC对PID参数自整定的要求。利用模糊控制规则在线对PID参数进行修改,便构成了模糊PID控制器。控制原理如图2所示。
控制器的输入为偏差E和偏差变化率△E,输出为Kp、Ki、Kd,分别为比例参数、积分参数和微分参数。经过适应于控制对象的模糊推理获得作为PID的Kp、Ki、Kd,从而根据被控对象状态实现对PID参数的实时自动调节。
2.2 pH值模糊控制器的设计
偏差E和偏差变化率△E为该控制器输入量,偏差E=pHsample(n)-pHset,其中pHsample(n)为以T作为采样周期,nT时刻采样得到的pH值;pHset为IC厌氧反应塔的标准pH值,为了方便研究,这里设定pHset=7。所以在该模糊PID控制器中,偏差E的范围为[-7,7],偏差变化率△E的范围为 [-7,7]。根据映射关系,将偏差E和偏差变化率△E分别模糊化为E和EC,模糊论域均为[-3,3],Kp、Ki、Kd的模糊论域也分别为 [-3,3]。模糊子集均记为{NB、NM、NS、Z0、PS、PM、PB},分别表示负大、负中、负小、零、正小、正中、正大。E、EC和Kp、Ki、Kd的隶属函数均取为三角形,如图3和图4所示,该函数具有计算复杂性低、控制精度高等特点。
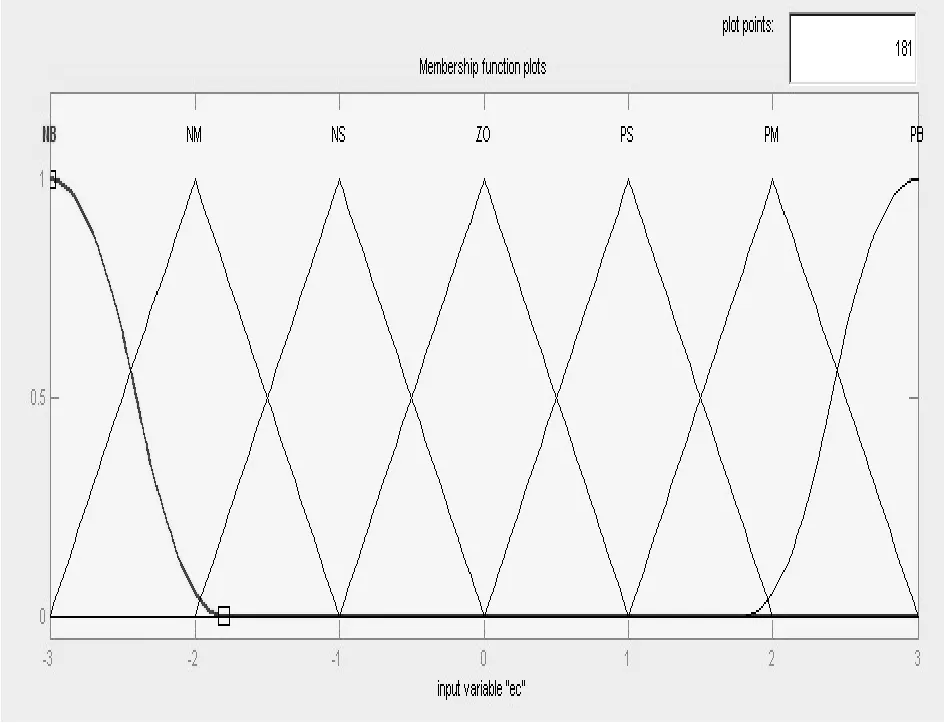
图3 E、EC隶属函数曲线
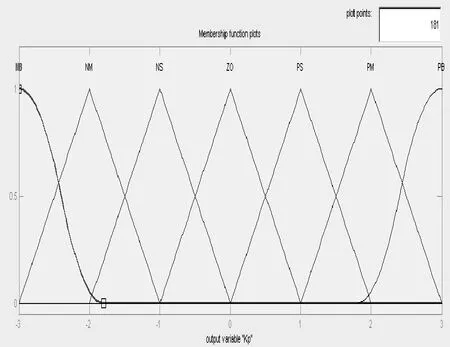
图4 Kp、Ki、Kd隶属函数曲线
通过分析,在不同的E和EC时,模糊PID参数自整定遵循以下原则[7]:
(1)当偏差E较大时,说明实际值与设定值相差很大,为了加快系统的响应速度,应取较大的Kp;同时为了避免由于开始时误差的瞬时变大可能出现的微分过饱和,而使控制作用超出许可的范围,应取较小的Kd;同时为了防止系统响应出现较大的超调,产生积分饱和,应对积分作用加以限制,所以通常取Ki值趋近于零。
(2)当E和EC处于中间值时,Kp应取得小一些,Ki的取值要适当,可以使系统响应具有较小的超调;这种情况下,Kd的值对系统影响较大,取值可根据E和EC的值来确定,大小要适中,以保证系统的响应速度。
(3)当偏差E较小或接近于设定值时,主要考虑避免系统在设定值附近出现振荡,同时根据偏差E接近设定值的程度,应适当增加Kp、Ki的值,使系统有良好的稳态特性;并考虑到系统的抗干扰性能,根据偏差EC的取值来确定Kd的取值,当EC的值变化小时Kd的值大些,当EC的值变化大时Kd的值小些。
基于上述控制规则,为了便于在线调整,将E和EC整数论域[-3,3]中的全部元素进行任意组合,结合工程技术知识和实际操作经验,通过模糊推理和模糊判决得出它们对应的Kp、Ki和Kd的值,建立符合控制对象pH值特点的模糊控制查询表,如表1~表3所示。
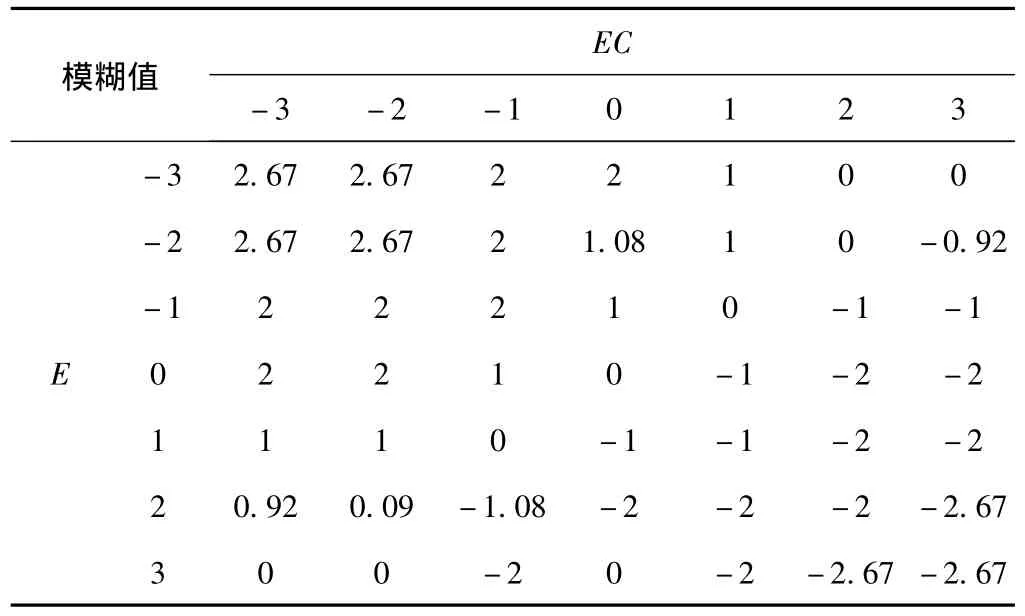
表1 Kp模糊控制查询表

表2 Ki模糊控制查询表
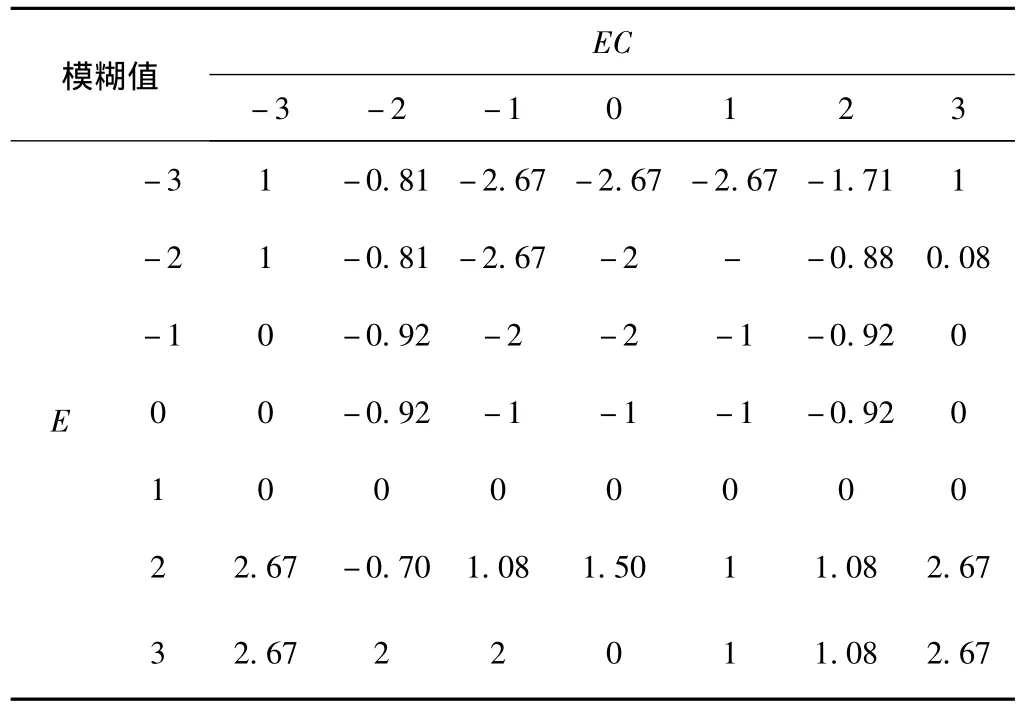
表3 Kd模糊控制查询表
3 控制方案的实现[8-10]
景兴纸业废水改造系统采用S7-300系统,因为S7-300稳定可靠、功能强大且自动化程度高。改造系统配置为:中央处理模块 (CPU)CPU315-2DP;数字量输入模块 (DI)SM321,6块;数字量输出模块 (DO)SM322,2块;模拟量输入模块 (AI)SM331,10块 (8×12位);模拟量输出模块 (AO)SM332,4块 (8×12位);电源模块选用 PS307,5 A,24 VDC;为了保证系统稳定和实时性,新系统使用以太网通信,型号为SM343-1,并与原有老系统保持通信,实现数据交换,整个网络采用TCP/IP通信协议。上位机采用WinCC6.2系统,用于调节并监控现场各参数,实现人机交互,系统运行中相应监控画面在上位机上显示。
整个程序的编写由STEP7来完成,程序采用模块化编程,模糊推理子程序根据采集的数据进行模糊推理,模糊推理子程序见图5。随后调用变频PID控制子程序,在程序中调用FB41功能块,并设置其相关参数,实现对过程变量的PID调节,即可实现对酸、碱计量泵变频器的控制,从而实现对IC厌氧反应塔的环境控制。
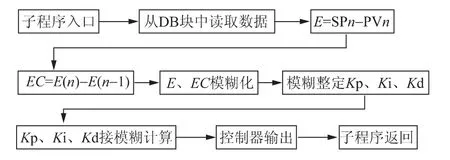
图5 模糊推理子程序
由前面可知,将模糊论域E的元素 {-3,-2,-1,0,1,2,3}转换为 {0,1,2,3,4,5,6}以便于寻址查询,然后采用“基址+变址”的寻址方式将模糊控制量表1、表2、表3中的PID控制结果按从上到下、从左到右的顺序填入PLC的数据寄存区DB1.0~DB1.192,DB2.0~DB2.192,DB3.0~DB3.192中。控制量的基址为0,其偏移地址为0+EC*7+E。PID三个参数的寻址分别找到后,经过解模糊运算,可得到精确的控制量Kp、Ki和Kd。在OB1中编写程序实现信号输入采样,得到误差和误差变化率,在循环中断组织块 OB35中调用 FB41“CONT_C”[11]实现PID闭环控制,查表程序分别在FB1、FB2、FB3中进行实现,查询表存放在数据块DB1、DB2、DB3中以供查询。
4 试验结果
根据以上模糊自适应PID控制方案,在废水pH值稳定的情况下,采用常规PID控制和模糊自适应PID控制进行比较:对IC厌氧反应塔入口处pH值进行检测,设定pH值=7,完成PLC的内部运行程序之后,采用常规PID控制曲线使用模糊自适应PID的方法,曲线如图6所示。
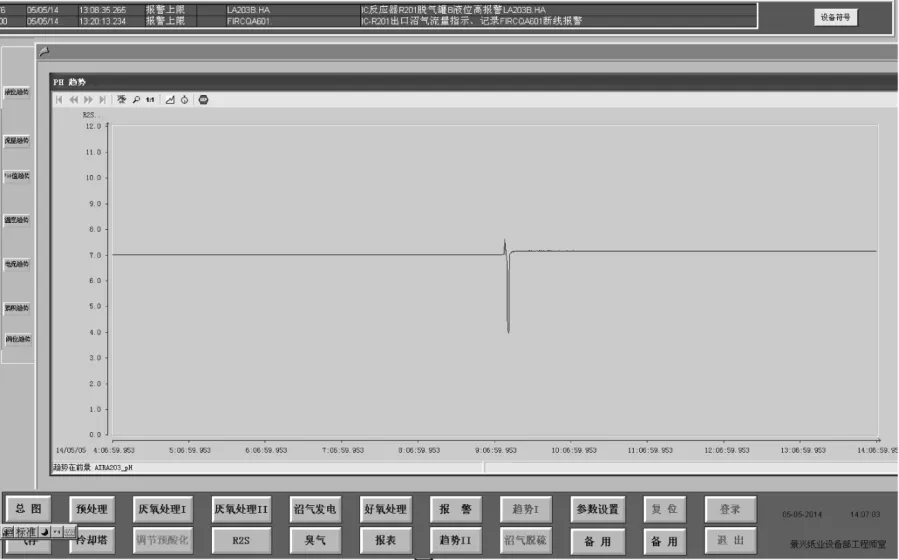
图6 常规PID控制曲线
从图6可以看出,当系统突然出现一个比较大的扰动时,所监控pH值同样会出现一个突然下降很大的波动,没有很好的响应调节,抗干扰能力不足,很容易引起超调现象发生。
使用模糊自适应PID的方法,曲线如图7所示。
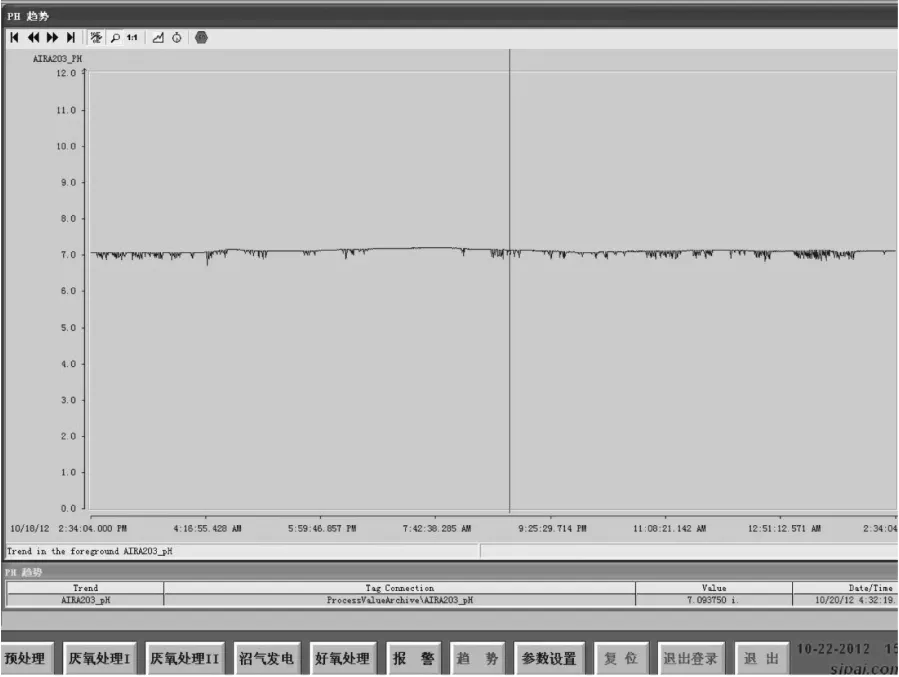
图7 模糊自适应PID控制曲线
图7中曲线为设定pH值=7时的自动调节响应曲线,从图7的曲线可以看出,系统因采用自适应调节,降低了超调量,响应速度加快,对参数变化不敏感,基本稳定在设定值附近,保证稳态特性又改善了动态性能。
5 结语
针对常规PID控制参数难以整定且不能灵活变化,对高阶、时变、非线性系统控制效果不理想的状况,设计了一种基于模糊自适应PID控制方法的废水处理pH值控制系统,对现有设备低成本条件下的技术改造很有意义。同时此种方法也能用到车间中其他一些复杂系统的备选方案中,产生可观的经济效益。
[1] ZHAO Yu-nan.Characteristics and Treatment of Pulping& Papermaking Effluent[J].China Pulp & Paper,2010,29(9):41.赵宇男.制浆造纸废水特性及处理的相关问题[J].中国造纸,2010,29(9):41.
[2] Wang Shuqing.Advanced control technology and its applications[M].Beijing:Chemical Industry Press,2005.王树青.先进控制技术及其应用[M].北京:化学工业出版社,2005.
[3] Shang Jiandong.Expert intelligent pH controller and its application[J].Chemical Automation and Instrument,1998,25(3):46.商建东.专家智能pH控制器及其应用[J].化工自动化及仪表,1998,25(3):46.
[4] Tao Yonghua.New type of PID control and its application[M].Beijing:China Machine Press,1998.陶永华.新型 PID控制及应用[M].北京:机械工业出版社,1998.
[5] Liu Jinkun.Advanced PID control the matlab simulation[M].Beijing:Electronic Industry Press,2003.刘金锟.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2003.
[6] Song Qing.Fuzzy PID algorithm in urban effluent treatment based on PLC control system applied research[D].Guilin:Guilin University of Technology,2011.宋 青.基于PLC的模糊PID算法在城市废水处理控制系统的应用研究[D].桂林:桂林理工大学,2011.
[7] Xi Aimin.Fuzzy control technology[M].Xi'an:Xi'an University of Electronic Science and Technology Press,2008.席爱民.模糊控制技术[M].西安:西安电子科技大学出版社,2008.
[8] Ceng Yanfei,Yu Shouyi.The realization of the adjustable parameter fuzzy control based on PLC[J].Journal of Guangdong Polytechnic Normal University,2005(6):9.曾燕飞,喻寿益.基于PLC的可调参数模糊控制的实现[J].广东技术师范学院学报,2005(6):9.
[9] Qu Feng,Xu Zhonghong.Fuzzy control based on Siemens S7-300 PLC[J].Journal of Nanjing Normal University,2007(12):23.瞿 枫,徐中宏.基于西门子S7-300 PLC的模糊控制实现[J].南京师范大学学报,2007(12):23.
[10] User's manual.Used for S7-300 and S7-400 standard software PID control[S].Siemens(China)Co.,Ltd.用户手册.用于S7-300和S7-400的标准软件PID控制[S].西门子(中国)有限公司. CPP
