基于最小二乘估计的声矢量阵稳健波束形成
2014-06-27王燕吴文峰梁国龙
王燕,吴文峰,梁国龙
(哈尔滨工程大学水声技术重点实验室,黑龙江哈尔滨 150001)
基于最小二乘估计的声矢量阵稳健波束形成
王燕,吴文峰,梁国龙
(哈尔滨工程大学水声技术重点实验室,黑龙江哈尔滨 150001)
针对存在导向矢量失配和快拍数不足时,声矢量阵标准Capon波束形成器性能急剧下降的问题,提出了一种基于最小二乘估计的声矢量阵稳健波束形成算法。鉴于声矢量阵声压通道和振速通道的导向矢量误差来源不同,分别为声矢量阵声压通道和振速通道设计了广义旁瓣对消器;利用最差性能最优化的思想,将声矢量阵标准Capon波束形成器转化为稳健最小二乘估计问题;利用二阶锥规划求解。仿真分析表明,该算法在抗导向矢量失配、快拍数不足、阵元姿态误差方面均有良好的性能。
信息处理技术;稳健自适应波束形成;声矢量阵;广义旁瓣对消器;最小二乘估计
0 引言
矢量传感器可以同点输出声场的声压和振速信息,相比于标量阵,基于矢量传感器的阵列不仅在目标方位估计方面有独特的优势,而且能获得更高的空间增益[1]。由于矢量传感器在构造和信号处理方式上的复杂性,矢量阵的自适应信号处理方法受导向矢量失配和快拍数不足的影响更为严重[2]。如矢量阵标准Capon波束形成(SCBV)在理想情况下是最优处理器,但在实际应用中,除了阵元幅相误差、位置误差、阵元间的互耦等失配外,各阵元的姿态误差同样会引起SCBV性能的下降[3],甚至导致期望信号自消现象。
对角加载技术是提升自适应波束形成算法稳健性常用的方法[4-6],该方法主要的缺点是最优对角加载量难以确定。Zhang等将基于广义协方差矩阵拟合(GLCV)方法应用于矢量阵[7],该方法在快拍数不足时具有较高的稳健性,但并未充分考虑导向矢量误差的影响。文献[8]将稳健波束形成方法移植到矢量阵上,并通过对声压通道和振速通道设定不同的导向矢量不确定集,提出了矢量阵稳健波束形成(RCBV),该算法的性能受导向矢量不确定集估计精度的影响。文献[9]同样区别对待声压和振速分量,通过对二者的权向量赋予不同范数约束,提出了基于双重范数约束的矢量阵波束形成(DNCV),该方法能灵活处理声压和振速的稳健性,但在抗阵元姿态误差方面仍存在不足。
针对存在导向矢量失配和快拍数不足时,声矢量阵标准Capon波束形成器性能下降问题,提出了一种基于声矢量阵最小二乘(LSV)估计的稳健波束形成算法。该算法通过若干个广义旁瓣对消器抵消声压通道和各振速分量干扰,在抑制干扰的同时,还能获得足够的稳健性。如无特殊说明,矩阵的范数均指F范数。
1 声矢量阵稳健波束形成
二维声矢量传感器能同时拾取声场中同一点的振速xvx、xvy和声压xp.对θ方向入射的远场平面波,单矢量传感器的时域输出为

式中:s(n)为传感器接收的声压波形,n为快拍数序号,为了分析方便假设波阻抗为1,这并不影响问题的分析。考虑一个M元二维声矢量阵列,K(K<M)组独立远场窄带平面波从θk(k=1,…,K)方向入射到基阵,则矢量阵输出模型可以表示为



式中:wd=[,]T,wp和wv分别为声压通道和振速通道的加权向量;ξ1和ξ2为用户设定值,其值越小,波束形成器稳健性越高,但阵增益会随之下降,通过对两参数选取合适的值,可使DNCV波束形成器在高增益和高稳健性之间折中。
2 基于LSV估计的稳健波束形成算法
2.1 算法描述
广义旁瓣对消器将波束形成器的权向量分解为静态权向量和自适应权向量两个部分[11],其中自适应权向量由阻塞矩阵和对应系数组成。利用该思想可为矢量阵各通道设计广义旁瓣对消器,若将矢量阵常规波束形成器的权值作为静态权值,则(3)式中的权向量可以表示为

图1中,ηp、ηx、ηy∈CM-1分别为声压、x轴和y轴对应阻塞矩阵的系数向量,在此结构下(5)式中的阻塞矩阵为B=I3×3⊗Q,相应系数为η=[p]T.将(5)式代入(3)式,并注意到wHs=1自然满足,则(3)式所述优化问题变为

图1 声矢量阵广义旁瓣对消结构Fig.1 Generalized sidelobe cancellers of vector-sensor array

由于利用有限快拍估计的Rx和实际数据协方差矩阵Rx之间存在误差,导致A和b均存在误差ΔA和Δb,则有

LSV估计对上述误差极为敏感,在考虑存在误差情况下,(7)式更为精确的表达式为

令ρ表示最差情况下‖[ΔA Δb]‖的取值,即‖[ΔA Δb]‖≤ρ,对每次批处理ρ为常数,关于ρ的取值将在下小节介绍。由最差性能最优化的思想,(7)式所述LSV估计转化为如下稳健LSV估计:
式中:A′=A/ρ;b′=b/ρ;ΔA′=ΔA/ρ;Δb′=Δb/ρ.由于ρ为常数,并不影响(11)式最后一项的解,先考虑最差情况下,即‖[ΔA′Δb′]‖=1时的如下问题:

(12)式成立的条件是两向量A′η-b′和ΔA′η-Δb′同相,即

(14)式可以通过高效内点法求解[12],求解得η后利用(5)式即可计算最终权值。

值得注意的是,上述推导过程是利用声矢量阵常规波束形成权值作为LSV算法的静态权值得出,但这并不妨碍其他一些算法权值作为本文算法的静态权值,如线性约束最小方差波束形成器[13](LCMV),只是此时的阻塞矩阵变为和LCMV算法约束子空间正交的正交子空间,除此之外,其余推导过程一样适用,篇幅所限本文将不再展开叙述。
2.2 参数计算
假设实际数据协方差矩阵Rx和估计数据协方差矩阵间存在误差矩阵Δ,且满足

式中:γ在每次批处理中为常数。在误差矩阵的范数约束下,(3)式可以表示为

为了计算最差情况下的数据协方差矩阵,先考虑如下问题:

利用Lagrange乘子法可得(18)式的解[14]

将(19)式和(18)式带入(17)式可得

由(20)式可以看出,在误差矩阵的范数约束下,最差情况下的数据协方差矩阵为+γI,利用(20)式替代Rx并代入(8)式和(9)式,可得ρ的取值:

由于γ值会随信号和干扰的功率变化而变化[15-16],为了消除这种不确定性,引入参数γ0,使其满足
式中:tr(·)表示取矩阵的迹;γ0是本文算法唯一引入的参数,用于评价数据协方差矩阵的估计误差,一般选择在0.5~1之间即可。为了提高小快拍时的估计精度,可利用GLCV算法对其预处理。
3 计算结果与比较
为验证LSV算法的稳健性及求解的正确性,设计了如下仿真实验。考虑一个由5元声矢量传感器组成的均匀线阵,阵元间距为半波长。定义阵列舷侧方向为0°,理想情况下各阵元y轴和线阵重合。3组平面波分别从10°、-30°和35°方向入射到基阵,其中10°方向的信号为期望信号,其他两组为干扰,且干噪比分别为15 dB和20 dB,信号和干扰均为互不相关的随机窄带过程。声压通道和矢量各轴噪声均为0 dB空间白噪声。将本文方法和现存4种方法(SCBV、GLCV、RCBV和DNCV)进行了比较分析,其中本文算法中的参数γ0=0.5,DNCV的参数取文献[8]的参考值ξ1=0.08和ξ2=0.06,由于RCBV参数取值和导向矢量不确定集有关,因此根据不同情况取各通道导向矢量不确定集上限的期望值,所有实验结果均是200次Monte Carle实验取平均值的结果,为了比较分析图中也给出了最优情况下的性能。
3.1 对随机导向矢量误差稳健性对比
随机导向矢量误差指由各阵元幅相误差和阵元位置误差引起的导向矢量误差,假设真实导向矢量as和预设导向矢量存在随机误差,即as=+e,其中e为服从均值为0、协方差矩阵为σ2I的复高斯随机变量[17],快拍数取100.图2显示σ=0.1时,各算法输出信干噪比SINR随输入信噪比SNR变化曲线。图3显示期望信号信噪比为10 dB时,各算法输出信干噪比随导向矢量误差的标准差σ变化曲线,横轴用标准差对数20lgσ表示。从图2可以看出,RCBV算法性能和DNCV算法性能相当,在整个考虑的输入信噪比范围内,本文算法的性能均高于其他算法。从图3可以看出,在导向矢量误差标准差小于-18 dB,RCBV算法、DNCV算法和本文算法性能几乎没有变化。随导向矢量误差标准差继续增加,各算法性能均出现一定下降,但本文算法的性能均略高于其他算法。

图2 各算法输出信干噪比随输入信噪比变化曲线Fig.2 Output SINR versus input SNR
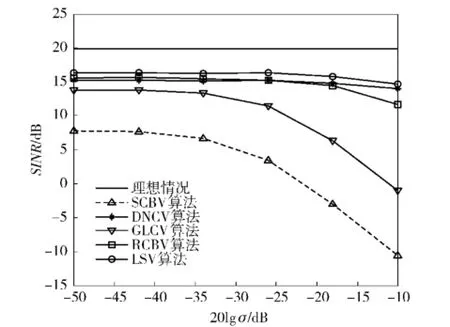
图3 各算法性能随导向矢量误差的标准差变化曲线Fig.3 Output SINR versus standard deviation of steering vector error
3.2 对观测方向误差稳健性对比
考虑精确校准的阵列,即不存在3.1节中的随机误差,由于波束扫描间隔的限制,波束预成方向和期望信号实际入射方向不可避免存在误差,令该方位误差为Δθ.图4显示Δθ=1°时,各算法输出信干噪比随输入信噪比变化曲线,快拍数取100.图5显示期望信号信噪比为10 dB时,各算法输出信干噪比随观测方向误差变化曲线,快拍数取100.从图4可以看出在输入信噪比小于15 dB时,本文算法的性能均高于其他算法,当输入信噪比继续升高时, RCBV算法的性能逐渐和本文算法性能接近,输入信噪比为20 dB时,二者性能相当。从图5可以看出,SCBV算法和GLCV算法对观测方向误差极为敏感,在整个误差区间内,本文算法、RCBV算法和DNCV算法表现都比较稳定。不存在观测方向误差时,各算法性能较最优值低是由快拍数不足引起的。
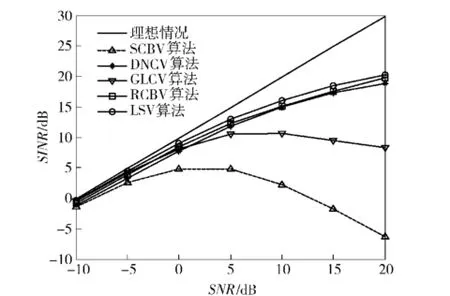
图4 各算法输出信干噪比随输入信噪比变化曲线Fig.4 Output SINR versus input SNR

图5 各算法性能随观测方向误差变化曲线Fig.5 Output SINR versus observation direction errors
3.3 对快拍数不足稳健性对比
分别考察存在随机导向矢量误差和观测方向误差时,各算法的性能随快拍数变化曲线,其中期望信号输入信噪比均为10 dB.图6显示存在实验1所述随机导向矢量误差且σ=0.1时,各算法的性能随快拍数变化曲线。图7显示存在1°观测方向误差时,各算法性能随快拍数变化曲线。从图6和图7可以看出,存在上述导向矢量失配时,相同快拍数下DNCV和SCBV算法性能相当,而本文算法输出信干噪比较二者约高1 dB.值得注意的是,GLCV算法性能随快拍数的增加有下降的趋势,这是因为随快拍数的增加,GLCV算法生成的对角加载量减少,而逐渐丧失了抵抗导向矢量失配的稳健性。
3.4 对矢量传感器姿态误差稳健性对比
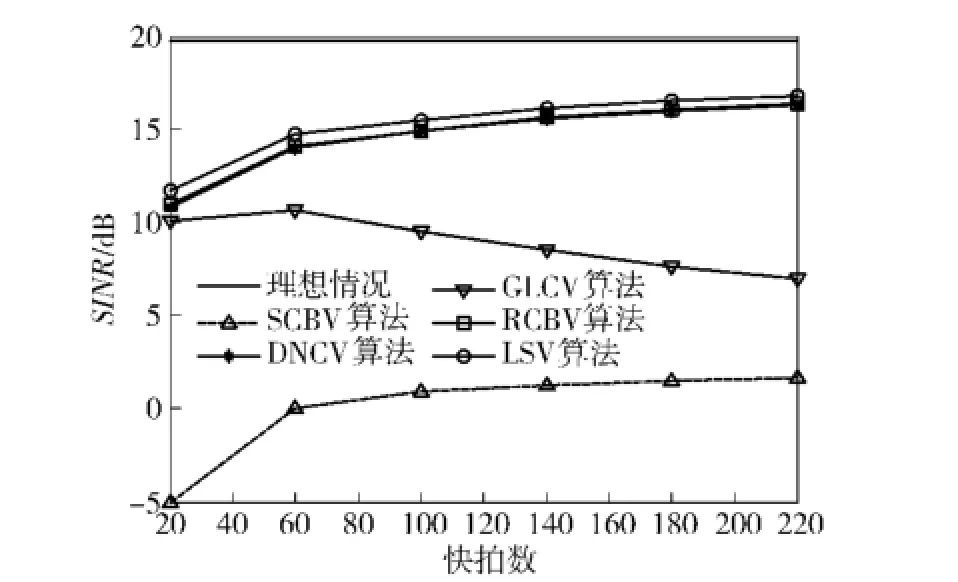
图6 存在随机导向矢量误差时各算法性能随快拍数变化曲线Fig.6 Output SINR versus the number of snapshots in the presence of array calibration error
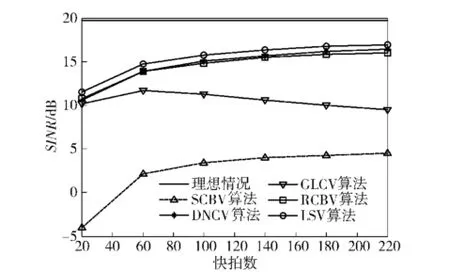
图7 存在观测方向误差时各算法性能随快拍数变化曲线Fig.7 Output SINR versus the number of snapshots in the presence of observation direction error

图8 矢量传感器姿态误差模型Fig.8 Attitude error model of vector-sensor array
广义欧拉角是描述刚体旋转常用的方法[9]。单声矢量传感器原始姿态如图8中Oxyz所示,其他任意姿态都可由下述三次转动获得:1)先绕z轴转φ角;2)然后绕体轴y(在新位置)转β角;3)最后绕体轴x(在新位置)转α角。新姿态下的矢量阵振速通道导向矢量可由文献[9]中广义欧拉角表示。假设导向矢量误差由姿态误差引起,其中α、β、φ均服从均值为0,标准差为δ的高斯分布,期望信号信噪比为10 dB,快拍数为100.图9显示各算法的输出信干噪比随姿态误差的标准差变化曲线。从图中可以看出,本文算法和DNCV算法性能受姿态误差影响较小,而在相同的姿态误差下,本文算法输出信干噪比更高。
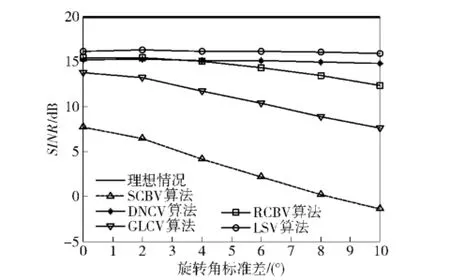
图9 各算法性能随姿态误差标准差变化曲线Fig.9 Output SINR versus standard deviation of attitude errors
4 结论
相比于标量阵,矢量阵自适应波束形成器更易受导向矢量误差和快拍数不足的影响,针对上述问题,提出了一种基于LSV估计的稳健波束形成算法。首先分别对声矢量阵声压通道和两个振速通道设计广义旁瓣对消器,利用常规波束形成器权值提取信号和干扰成分,利用自适应权值提取用于抵消的干扰成分,从而提高输出信干噪比。通过求解数据协方差矩阵范数约束下的最小二乘估计问题,保证算法的稳健性。仿真分析表明,该算法在抗随机导向矢量误差、观察方向误差、快拍数不足和矢量传感器姿态误差方面均有良好的性能。
References)
[1] Song A,Abdi A,Badiey M,et al.Experimental demonstration of underwater acoustic communication by vector sensors[J].IEEE Journal of Oceanic Engineering,2011,36(3):454-461.
[2] Poulsen A J,Nadakuditi R R,Baggeroer A B.Robust adaptive vector sensor processing in the presence of mismatch and finite sample support[C]∥Sensor Array and Multichannel Signal Processing Workshop,SAM 2008.Darmstadt:IEEE,2008:473-477.
[3] 刘凯,梁国龙,张光普.初探阵列误差对矢量阵波束形成系统的影响[J].系统仿真学报,2012,24(4):848-853.
LIU Kai,LIANG Guo-long,ZHANG Guang-pu.Exploratory analysis to influence of array errors on vector-sensor array beam-forming system[J].Journal of System Simulation,2012,24(4):848-853.(in Chinese)
[4] 宋海岩,朴胜春,秦进平.基于矢量最优化的稳健波束形成[J].兵工学报,2012,33(10):1222-1229.
SONG Hai-yan,PIAO Sheng-chun,QIN Jin-ping.Robust adaptive beamforming based on vector optimization[J].Actc Armamentarii,2012,33(10):1222-1229.(in Chinese)
[5] Du L,Li J,Stoica P.Fully automatic computation of diagonal loading levels for robust adaptive beamforming[J].IEEE Transactions on Aerospace and Electronic Systems,2010,46(1):449-458.
[6] Li J,Stoica P,Wang Z S.On robust capon beamforming and diagonal loading[J].IEEE Transactions on Signal Processing, 2003,51(7):1702-1715.
[7] Zhang Y W,Sun D J,Zhang D L.Robust adaptive acoustic vector sensor beamforming using automated diagonal loading[J].Applied Acoustic,2009,70(8):1029-1033.
[8] 刘凯.声呐波束形成鲁棒性及算法研究[D].哈尔滨:哈尔滨工程大学,2011.
LIU Kai.Research on robustness and algorithm of sonar beamforming[D].Harbin:Harbin Engineering University,2011.(in Chinese)
[9] 梁国龙,刘凯,温韶娟,等.基于洛伦兹规划的声矢量阵宽容自适应波束形成[J].声学技术,2011,30(1):98-101.
LIANG Guo-long,LIU Kai,WEN Shao-juan,et al.Robust adaptive beamforming of acoustic vector sensor array based on Lorenz cone programming[J].Technical Acoustic,2011,30(1):98-101.(in Chinese)
[10] Yu Z L,Hwa Er M.A robust minimum variance beamformer with new constraint on uncertainty of steering vector[J].Signal Processing,2006,86(9):2243-2254.
[11] Selèn Y,Abrahamsson R,Stoica P.Automatic robust adaptive beamforming via ridge regression[J].Signal Processing,2008, 88(1):33-49.
[12] Boyd S P,Lieven V.Convex optimization[M].Cambridge: Cambridge University Press,2004:561-623.
[13] Samuel DSomasundaram.Robust Capon beamforming with additional linear constraints[C]∥2011 IEEE Statistical Signal Processing Workshop.Nice:IEEE,2011:145-148.
[14] Shahbazpanahi S,Gershman A B,Luo Zhi-quan,et al.Robust adaptive beamforming for general-rank signal models[J].IEEE Transactions on Signal Processing,2003,51(9):2257-2269.
[15] Zeng X Y,Wang S G.Bark-wavelet analysis and Hilbert-Huang transform for underwater target recognition[J].Defence Technology,2013,9(2):115-120.
[16] Lu Z H,Zhang Z H,Gu J N.Numerial calculation of seafloor synthetic seismograms caused by low frequency point sound source [J].Defence Technology,2013,9(2):98-104.
[17] Jian L,Lin D,Stoica P.Fully automatic computation of diagonal loading levels for robust adaptive beamforming[J].IEEE Transactions on Aerospace and Electronic System,2010,46(1):449 -458.
Robust Adaptive Beamforming of Acoustic Vector-sensor Array Based on Least Squares Estimation
WANG Yan,WU Wen-feng,LIANG Guo-long
(Science and Technology on Underwater Acoustic Laboratory,Harbin Engineering University,Harbin 150001,Heilongjiang,China)
The performance of Capon beamformer of acoustic vector-sensor array degrades sharply in the presence of array steering vector mismatch.A robust beamforming algorithm based on least squares estimation is proposed to solve this problem.Several generalized sidelobe cancellers are designed for acoustic pressure channel and vibration velocity channel in consideration of the different error sources of their steering vectors.The Capon beamformer of acoustic vector-sensor array is converted to a robust leastsquares estimation problem based on the principle of worst-case performance optimization.The second-order cone programing is adopted to obtain the optimal solution.The simulation results show the efficiency of the proposed algorithm in the cases of steering vector mismatch,snapshot deficiency and sensor attitude error.
information processing;robust adaptive beamforming;acoustic vector-sensor array;generalized sidelobe canceller;least squares estimation
TB566
:A
1000-1093(2014)03-0379-06
10.3969/j.issn.1000-1093.2014.03.013
2013-05-07
国家自然科学基金项目(51279043、61201411、51209059);海军装备预先研究项目(1011204030104);水声技术国家重点实验室基金项目(9140C200203110C2003);黑龙江省普通高校青年学术骨干支持计划项目(1253G019)
王燕(1973—),女,教授,博士生导师。E-mail:wangyan@hrbeu.edu.cn;吴文峰(1987—),男,博士研究生。E-mail:wwf@hrbeu.edu.cn
