An Improved Result of Multiple Model Iterative Learning Control
2014-04-27XiaoliLiKangWangDexinLiu
Xiaoli Li Kang Wang Dexin Liu
I.INTRODUCTION
O NE of themost important indicators formanufacturing industries is to precisely control various hardware such as servo motor and manufacturing system.Practically,the dynam ics of a robotmanipulator or servo motor are highly nonlinear,and because of loading effects or system failure,the system may always suffer from parameter or structure uncertainties.In fact,the control of nonlinear system w ith uncertainties is a tough task.
Iterative learning control(ILC)is considered to be themost powerful way to handle this problem effectively.According to the ILC theory,input signals w ill be refined based on the output error at every iteration,until the output tracks the desired trajectory for all the time interval.ILC showsuniform tracking performance and has been applied to w ide areas[1],such as robotics,servo motors,batch reactors,aerodynam ic systemsandmany new fields including agricultural industry[2],automatic train operation[3]and traffic control[4].
In 1984,Arimoto and his associates proposed the iterative learning control concept,and ILC was fi rstly adopted to improve the controlperformance of robots[5].Since their pioneering work,ILC has been further explored and rapid progress has been achieved.Many ILC methods such as P-type,PD-type,PID-type,high-order,backward-forward learning laws and the concept of forgetting factor have been proposed[6].Recent trend focuses on combining the above ILC methods w ith other control theories and algorithms,like adaptive control[7],neuralnetwork[8−9],optimal control[10−11],predictive control[12−13],etc.And the design and analysis methods have been developed from contraction mapping theory to super vector approach[14],Lyapunov-like approach[15−17],frequency-domainmethod[18−19]and 2-D based theory[20−21].Recent survey about ILC can be found in[22−24].
ILC is a powerful control strategy for nonlinear system w ith robust property,a good control property can be obtained even in the case that the precise model of the system is unknown.If the upper bound and Lipschitz condition of the parameters of the system can be satisfied,the system even w ith unmodeled dynamics can also be controlled to track the reference trajectory,and thestability and convergence property can be guaranteed[25−26].For system w ith unknown parameters,the unknown parameters can be identified in iteration axis by adaptivemechanism,and an adaptive ILC controller w ill be set up for the system w ith time variant parameters[27]or the nonlinear system w ith unknown parameters[28−30].The adaptive ILC can be regarded as a kind of indirect adaptive control.Ithasbeen anew controlmethod fornonlinear system,and the research in this field hasattracted interestofmore and more scholars in recent years.
In ILC method,the transient response improvement,that is,how to achieve satisfying control performance w ith least iteration times,is a noticeable problem.(It should be noted that the transient response in this paper refers to the least iteration times required for satisfactory tracking performance in iteration domain which is different from the transient response discussed in time domain for classical linear system.)In some circumstance,the iteration timesmay be too long to apply ILC effectively,especially when system failure occurs.The control performance may get worse due to long time spentin parameter identificationwhen system parameter jumps drastically.On the other hand,according to the ILC theory for the unknown nonlinear dynam ic systems,as long as the Lipschitz condition is satisfied,uniform tracking performance can be guaranteed evenw ith partly known orestimatedmodel.Though the exactmodel is not required,number of iterations for ILC w ith estimated model w ill increase compared w ith ILC w ith exactmodel.
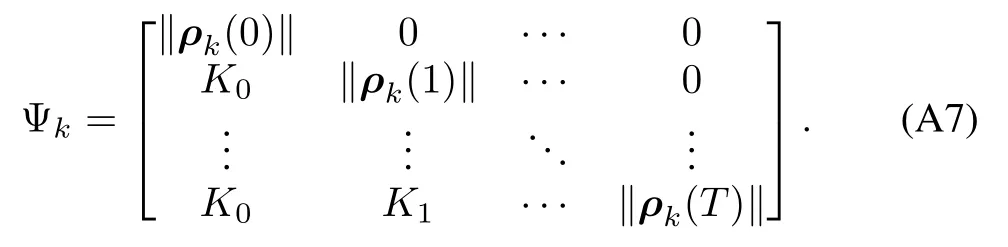
One way to solve this problem is to introduce multiple model adaptive control(MMAC)to ILC.According to the MMAC theory,multiple models w ill be built based on the uncertainties of controlled model′s parameters and structure.Multiple controllers w ill be designed according to multiple elementmodels.According to thegiven sw itchingmechanism,themodelw ithmostappropriateelements to describe the plant w ill be decided,and the current controller w ill be sw itched to the controller corresponding to the best model.Multiple model adaptive control has been considered as one of the most effective control method for complex system for its ability to achieving high control accuracy,fast tracking speed and reliable stability[31].Multiple model iterative learning control(MM ILC)was introduced in[32].In[32],beforeevery iteration,the best model is decided by the multiple model adaptive control strategy and corresponding controller based on ILC learning law is activated,thus the transient response w ill be improved greatly.However,convergence is guaranteed in a strong condition that‖Ψk‖ <1(whereΨkis defined below by(7))which is not easy to be satisfied inmost cases.Supposing that this condition cannot be established,[32]also provides away to stop iteration ata finalmodelwhereek≤ε(ekis the error between the actual and desired trajectory at thekth iteration andεis a given small positive number)ork≥k0(kis the iteration times andk0is the given finite positive integer).In this case,multiple model control is manually changed to be one model control which cannot get as perfect performance as ideal MM ILC shows.
In this paper,for a class of nonlinear time-discrete system,we discuss the improvement and effectiveness of multiple model iterative learning control.A simplified control procedure is proposed,and the control output is proved to be convergent to the desired trajectory w ith relaxed conditions.The conditions‖Ψk‖<1,ek≤ εandk≥k0are no longer needed.Finally,simulation is given to show the effectiveness of the proposed method.
II.ITERATIVE LEARNING CONTROL BASED ON MODEL ALGORITHM
Consider the discrete-time unknown nonlinear system described as follows:

and the system is periodic in timetw ith periodT,i.e.,t∈{0,1,···,T}.The control vector and measurable state vector of the system are denoted byu(t)∈Rrandx(t)∈Rnrespectively.Suppose thatBis full column rank and the system is full state output,the estimated model of{f,B}is known as{,},Bandare bounded,satisfies,fandBsatisfy the uniform ly global Lipschitz condition,i.e.,for arbitraryt∈[0,T],x1,x2∈Rn,
wherekfandkBare Lipschitz constants.
To track the desired trajectoryxd(t),t∈{0,1,···,T},[25]proposed a ILC learning law based on partly known system model

where

andkindicates the iteration times.
Forsystem(1),suppose that the imposed initialcontrol inputu0(t)is continuousand selected arbitrarily,when learning law(2)is applied,uniform convergence can be guaranteed by the follow ing lemma.
Lemma 1[25].For accessible desired trajectoryxd(t)(0≤t≤T),if system(1)satisfies the follow ing conditions:

b)xk(0)=xd(0).
Then by the effect of learning algorithm(2),ask→ ∞,‖ek(t)‖→0(0≤t≤T).
The proof of Lemma 1 is in Appendix A.
III.ILC BASED ON MULTIPLEMODELS
In practical control process for systems that perform the same task iteratively,there are lots of environments where parameters are unknown or uncertain.A lthough ILC method can handle this problem effectively,ILC based on multiple models can give amore perfect performance.In this section,we discuss the establishment of model set and corresponding controllers,the selection of sw itching performance index function,and the procedure of the improved multiple model ILC.
For a time-varying system,the plant′s parameters change either slow ly or abruptly.In this section,a special case is considered,where the plant′s parameters are constant fi rstand then jump abruptly to another constant value.For system(1),f(x(t),t)andB(x(t),t)can be described byf(x(t),θ(t),t)andB(x(t),α(t),t),whereθ(t)andα(t)are piece-w ise constant vectors in timet.In the case of ILC,system(1)can be rew ritten as

wheret∈{1,2,···,T};k=0,1,···,∞;(θk(t),αk(t))∈{(θj1,αj2)|j1=1,2,···,dθ;j2=1,2,···,dα}.Anddθ,dαare finite integers known a priori.
For notational simplicity,we denotef(x(t))=f(x(t),t),f(x(t),θ(t))=f(x(t),θ(t),t),and the same notationmethod is applied to matrix functions related toB.
A.Model Set and Corresponding Controllers
In general,traditional adaptive control is efficient when themodel parameter is constant or varies slow ly.In practice,for complex system which may change from one operating environment to another abruptly,parametermay also change dramatically in a short time,resulting in model inaccuracy.And it has been found that conventional adaptive control method shows poor performance for complex system.
According to the MMAC theory,to cover the uncertainty of system,multiplemodels responding to differentenvironments are built.And forevery environment,theremustbe at leastone model which is close enough to the current unknown plant.When onemodel is considered to be themostaccurate one to describe the plant,corresponding controllerw illbe selected to control the plant.Themodel can be either fixed or adaptive.In this paper,we consider the simplest case that allmodels are fixed.Based on the estimated valuesandi2(i2=1,2,···,d2)of parametersθandαrespectively,model set can be set up as

whereΠ={(i1,i2)|i1=1,2,···,d1;i2=1,2,···,d2}.
Forunknown nonlinear dynam ic system,ILCw illbe formed based on partly known or estimated model,and the exact know ledge of system w ill notbe required.However,themore precise themodel is,the faster transient responsewemay get.An index function w ill be calculated to decide which model describes the plant best.
According to the model set we just established,corresponding controllersw ill be formed based on the ILC control strategy(2).

where
The index function will decide the bestmodel,and corresponding controller w ill be selected to control the system,thus,the performance of transient responsemay be improved.
B.Switching Performance Index
The sw itching mechanism is proposed to decide themost accurate model for current environment at every iteration and activate the corresponding controller.A typical sw itching mechanism isbased on the performance index functionLi,k(t)for each modelM iat thekth iteration.The index function should consider the long-term error accumulation to estimate the elemental model accuracy reliably.The following index sw itching function is given:
where

For iteration with parameter jumping,errors betweenmodel and system before the jumping point are less important than thoseafter thispoint to calculate themodelperformance index.And the forgetting factorβdeterm ines the rate atwhich each model′s past estimation errors are attenuated.According to ILC theory,control signals will be refined through iteration until the desired input is achieved.Before every iteration,sw itching index of every elemental modelLi,k(i∈Π)is calculated,themodelw ith the smallesterrorw ill be selected,i.e.,modell(k)is selected ifl(k)=argm ini∈ΠLi,k.
C.Improved Multiple Model ILC
Assum ing that the parametersθandαoffff(xxx(t),θ(t))andBBB(xxx(t),α(t))vary in co n vex se?tsΩθ?andΩαrespec t ively, a?nd the? upper bounds ofandexist,whereandw illbe given in Theorem 1.The follow ing improved multiplemodel ILC can be given as below:
1)Multiple model set offff(xxx(t),θ(t))andBBB(xxx(t),α(t))w ill be set up as below:

2)At the end of thekth iteration,the bestmodel to describe the current environmentw ill be selected,i.e.,

Denotel(k)=(l1(k),l2(k)).Itw ill sw itch to controllerCl(k)based on model in the next iteration.

IV.THE STABILITY OF THE IMPROVED MM ILC
One of the most significant characteristics of a successful MMAC design is that the stability of the closed system can be guaranteed even w ith infinite sw itching times amongmultiple models.
In[32],the sw itching times of multiple controller is considered in the follow ing two ways:
Case 1.Finite sw itching times
In this case,an upper boundεof trajectory error,and a lower boundk0of iteration times should be given,then the sw itching w ill be ceased if

The sw itching is stopped in finite sw itching times.
Case 2.Infinite sw itching times
In this case,a condition‖Ψk‖ <1 should be satisfied.Thus,evenw ith infinite sw itching,the performance of uniform tracking can be guaranteed.
whereρk(t)=I−+(ek(t),t)B(xk(t),t)and
K p=kt k2,t−1···k2,p+1k1,p(p=0,1,2,···,t−1),
In Case1,the sw itching w ill be stopped atone finalmodel.Thus,multiplemodel ILC is finally changed into a conventional ILC based on a singlemodel.Though the stability can be gotas traditional ILCmethod,the result isnot the bestone.The ideal result is thatevenw ith infinite timesof iteration,the control stability can be guaranteed.
Though infinite sw itching stability can be guaranteed in Case2,a really strong condition that‖Ψk‖<1 must be satisfied.From(7),we can see thatΨkis a lower triangularmatrix whose all nonzero elements are related to bothkandt.With the increment ofkandt,the condition is hard to be satisfied because the nonzero elements ofΨkmay be relatively big.Thus,infinite sw itching stability is not easy to be guaranteed.
The infinite sw itching condition in[32]is so strict that it can be satisfied only in rare circumstances,which limits the application scope of multiple model ILC.In this paper,we w ill relax this condition,and it can be proved that infinite sw itching stability can be guaranteed w ithout the constraint of‖Ψk‖<1.
Lemm a 2.ForA∈Cn×nw ith its eigenvaluesλi,i∈{1,2,···,n},if maxi∈{1,2,···,n}|λi|< δ<1,the follow ing inequality can be guaranteed:

whereσis a positive constant andδ<γ<1.
The proof of Lemma 2[33−34]is in Appendix B.
Theorem 1.For system(3),for every elementalmodelM i,if the follow ing conditions are satisfied:

c)xk(0)=xd(0),
where

then even w ith infinite sw itching times,the state of the system w ill track the desired trajectory asymptotically.
Proof.For singlemodel ILC,from the proof of Lemma 1 given in Appendix A,we can get
For system(3),when controlnalgorithm(2)is applioed,multiplemodels are given bySinceρk(t),K pandΨkare all relative tofor notational simplicity,we defineandas theρk(t),K pand Ψkcorresponding to modelM i.
Considering in the(k+1)-th iteration,modelM l(k)is used.So in the structure of MM ILC,we have
where

Consid?ering 0≤andwe have

if we denote


whereσis a positive constant and 0<γ<1.
Furthermore,we have

Asσis constant and 0<σ<∞,0<γ<1,so whenk→∞,we have

further,
and from(A3)of Appendix A and condition c)of Theorem 1,we havexk(t)→xd(t),ask→∞.
Remark 1.Consider the definition ofK ipunder theassumptions thatfandBsatisfy the uniform Lipschitz condition,Bandare bounded andcondition a)of Theorem 1 can be guaranteed.
Remark 2.As the established models satisfycondition b)of Theorem 1 can be guaranteed.
Through the above analysis,we can see that the proposed improved MM ILCmethod only requires the establishedmultiplemodels satisfy assumptionswhich traditional singlemodel ILC must be satisfied.And the stability can be guaranteed even w ith infinite sw itching times.
V.SIMULATION
Considera discrete-time unknown nonlinear system in form

the desired state trajectoryxd(t)is given by
Compared w ith system(3),thefpart of the controlled system satisfies the Lipschitz condition apparently,and the correspondingBBBpart is a constant matrix which is also bounded,so the upper bounds ofandboth exist.We conducted simulations for two cases:one for the system w ith constantparameter,and theother forsystem w ith jumping parameter.
Case 1.ILC for system w ith constant parameter
Whenv(t)≡1,the estimated value ofv(t)is˜v=2,corresponding ILC model is shown as
Fig.1 depicts the state and desired trajectoriesand the curve of output errorekgiven as below:

and we can see that after about 15 trials,the output error converges to zero.
Case 2.System w ith jum ping parameter
When parametervis piecew ise constant depicted by

wherekrepresents the iteration times.In practice,v(k,t)is the parameter which is measured imprecisely,or estimated by experienced workers.In our simulation,the estimation ofv(k,t)is selected random ly around the true value.Numerous experiments show thatother estimation ofv(k,t)can also get similar results.Four estimated values ofv(k,t)are given as1=2,2=10,3=6.5,4=5.5.For system w ith jumping parameter,we consider two cases by using singlemodel ILC and multiplemodel ILC.
1)A singlemodel ILC


Fig.1. Parameter-fixed system using conventional ILC.
When single model ILC is applied to the system w ith jumping parameter,about 75 iteration times are needed for the state to converge to the desired trajectory as shown in Fig.2.
2)Multiplemodel ILC
The control result is shown in Fig.3,and Fig.3(c)depicts the sw itching procedure that how the bestmodel is selected at every iteration.Parameterβof sw itching index function is set to be 0.9.
From Fig.1,we can see that fornonlinear system w ith fixed parameter,theuniform convergentperformance can be reached after about 15 iterations when conventional ILC method is applied.When the same controlmethod is applied to system with jumping parameter,as shown in Fig.2,the state errordecreases sharply at the fi rst 3 trials the same as for the system w ith fixed parameter shown in Fig.1(b).However,when parameter changesat the 4th and 5th trial,corresponding error increases sharply in the next trial,that is because the estimated model is no longer compatible w ith the system,numerous times of iterative learning(about 75)is needed for conventional ILC based on singlemodel is no longer applicable.

Fig.2. Parameter-jumping system using conventional ILC.
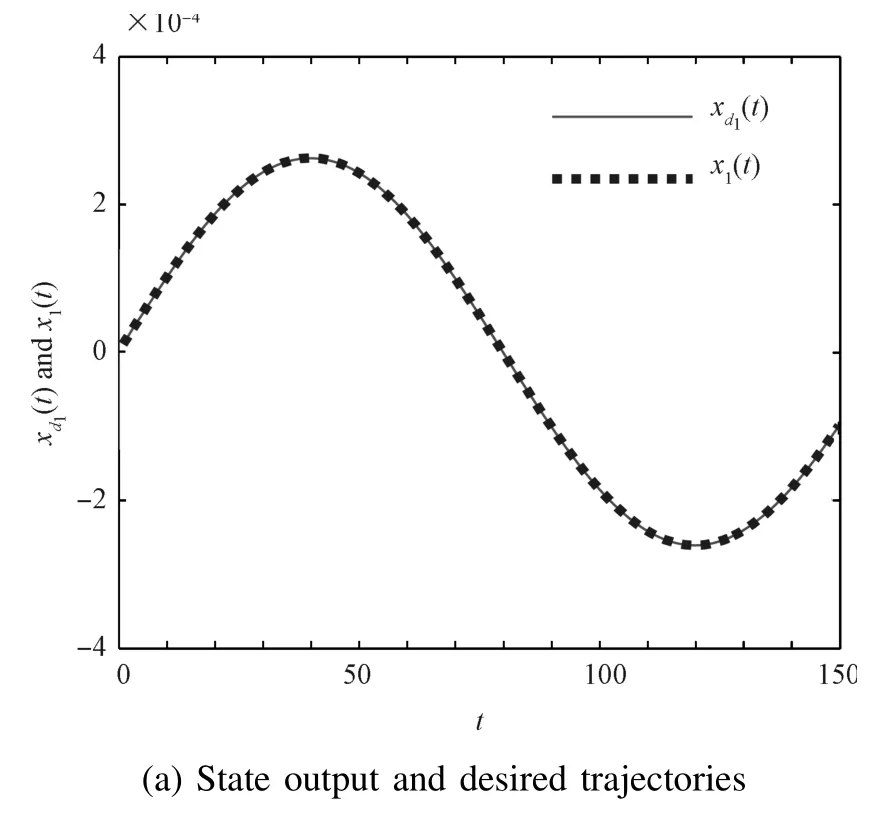

Fig.3. Parameter-jumping system using multiplemodel ILC.
But for multiple model ILC shown in Fig.3,the four models contain all possible situations and the bestmodelw ill be decided after every iteration.So it can be seen clearly in Fig.3(c)that the most precise model is selected after parametervchanges.Whenk=4,vchanges from 1 to 9,and at the end of the 4th trial,model2 is calculated to be themost precise one instead ofmodel 1,so model 2 is selected when the 5th trial begins.Based on this kind of control strategy,as shown in Fig.3(b),after about10 trials the state outputerror approaches zero,while 75 trials are needed for a singlemodel ILC shown in Fig.2(b).In Fig.3(c)it can be seen that after about 14 iterations,MM ILC stops sw itching and it stabilizes at the 4th model.
The simulations show that iteration times can be decreased apparently based on multiple model method compared w ith conventional ILC strategy.So we can easily come to the conclusion that for a complex nonlinear system,multiple model iterative learning control can significantly improve the performance of transient response.
VI.CONCLUSION
For complex nonlinear system w ith uncertainty,it is a good method to combine ILC w ithmultiplemodel adaptive controlwhich can cover the uncertainty and select the bestmodel for every current circumstance.However,formerMM ILCmethod needs the sw itching to be ceased manually,or a very strict conditionwasneeded to besatisfied.In thispaper,an improved multiple model ILC method is proposed.First,a class of system to be handled is described,ILCmethod based onmodel algorithm is presented and is proved to be effective to track the desired trajectory uniform ly.Then,a simplified MM ILC procedure is presented,w ithout extra stopping condition,the state output error converges to zero asymptotically even w ith infinite sw itching times.In particular,the improved multiple model ILC is proved to be convergent w ith a relaxed condition which expands the application scope greatly.Finally,the simulations show that the improved multiplemodel ILC can improve the performance of transient response greatly compared w ith conventional iterative learning control.
APPENDIX A PROOF OF LEMMA 1[25]
Proof.From(2),we can get

Since

then
Taking norms of both sides of(A1)gives
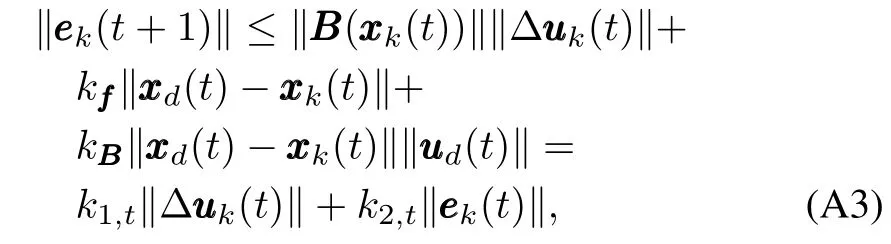
wherek1,t=‖B(xk(t))‖,k2,t=kf+kB‖ud(t)‖,andk2,tis irrelevant tok.
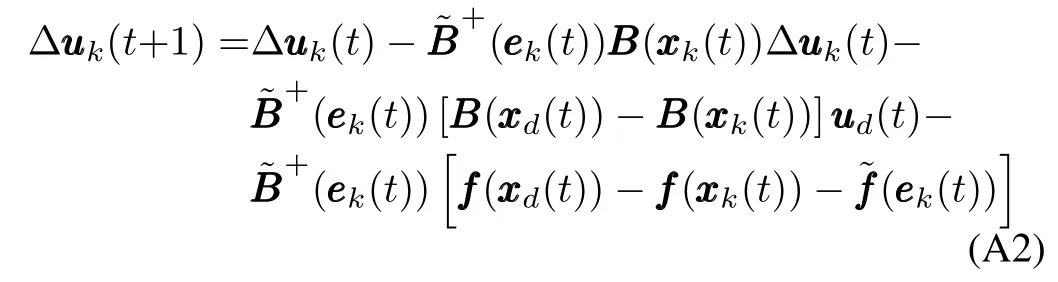
Taking norms of both sides of(A2)gives

wherekt=+(ek(t))‖(kB‖ud(t)‖+kf+b˜f)andρk(t)=I−+(ek(t))B(xk(t))are both relevant tok.Considering(A3)and(A4),we have
whereK p=kt k2,t−1···k2,p+1k1,p(p=0,1,2,···,t−1).Rew rite(A5)fromt=0 tot=T
Rew riting the above into the form ofmatrix,we have

where

Then,considering(A3)and condition b)of Lemma 1,we have

APPENDIX B PROOFOF LEMMA 2[33−34]
Proof.For an arbitrary positiveε,there is a compatible norm‖·‖∗which satisfies

Due toδ<1,we can let theεsatisfyδ+ε<1,and letγ=δ+ε,then

From the functional analysis,compatible norm satisfies
whereσis a positive number which is determined by the relationship between 2-norm and∗-norm.
Then
[1]Xu JX,Bien Z Z.The frontiers of iterative learning control.Iterative Learning Control.Boston:Kluwer,1998.9−35
[2]Bu Xu-Hui,Hou Zhong-Sheng,Yu Fa-Shan,Fu Zi-Yi.Iterative learning control for trajectory tracking of farm vehicles.Acta Automatica Sinica,2014,40(2):368−372(in Chinese)
[3]Li Z X,Yin C K,Jin S T,Hou Z S.Iterative learning control based automatic train operation w ith iteration-varying parameter.In:Proceedings of the 10th IEEE International Conference on Control and Automation.Hangzhou,China:IEEE,2013.51−56
[4]Hou Z S,Yan JW,Xu JX,Li Z J.Modified iterative-learning-controlbased rampmetering strategies for freeway traffi c controlw ith iterationdependent factors.IEEE Transactions on Intelligent Transportation Systems,2012,13(2):606−618
[5]Arimoto S,Kawamura S,M iyazaki F.Bettering operation of robots by learning.JournalofRobotic Systems,1984,1(2):123−140
[6]Bristow D A,Tharayil M,A lleyne A G.A survey of iterative learning control.IEEEControlSystemsMagazine,2006,26(3):96−114
[7]Hou Z S,Zhu Y M.Controller-dynam ic-linearization-based model free adaptive control for discrete-time nonlinear systems.IEEETransactions on Industrial Informatics,2013,9(4):2301−2309
[8]Liu TQ,Wang DW,Chi R H,Shen Q.Neural network based term inal iterative learning control for tracking run-varying reference point.In:Proceedings of the 9th Asian Control Conference.Istanbul,Turkey:IEEE,2013.1−5
[9]Jiang P,Unbehauen R.Iterative learning neural network control for nonlinear system trajectory tracking.Neurocomputing,2002,48(1−4):141−153
[10]Chi R H,Wang D W,Hou Z S,Jin S T.Data-driven optimal term inal iterative learning control.Journal of Process Control,2012,22(10):2026−2037
[11]Owens D H,Freeman C T,van Thanh D.Norm-optimal iterative learning control w ith intermediate pointweighting:theory,algorithms,and experimental evaluation.IEEE Transactions on Control Systems Technology,2013,21(3):999−1007
[12]Lee K S,Lee JH.Convergence of constrained model-based predictive control for batch processes.IEEE Transactions on Automatic Control,2000,45(10):1928−1932
[13]Shi Jia,Jiang Qing-Yin,Cao Zhi-Kai,Zhou Hua,Gao Fu-Rong.Twodimensionalmodel predictive iterative learning control scheme based on a two-dimensional performance model.Acta Automatica Sinica,2013,39(5):565−573(in Chinese)
[14]Bu Xu-Hui,Yu Fa-Shan,Hou Zhong-Sheng,Wang Fu-Zhong.Iterative learning control for a class of linear discrete-time sw itched systems.Acta Automatica Sinica,2013,39(9):1564−1569(in Chinese)
[15]Xu JX,Tan Y.A composite energy function-based learning control approach fornonlinear systemsw ith time-varying parametric uncertainties.IEEETransactionson Automatic Control,2002,47(11):1940−1945
[16]Chi R H,Hou Z S,Xu JX.Adaptive ILC for a class of discrete-time systems w ith iteration-varying trajectory and random initial condition.Automatica,2008,44(8):2207−2213
[17]Sun M ing-Xuan,Yan Qiu-Zhen.Error tracking of iterative learning control systems.Acta Automatica Sinica,2013,39(3):251−262(in Chinese)
[18]Norrlof M,Gunnarsson S.Time and frequency domain convergence properties in iterative learning control.International JournalofControl,2002,75(14):1114−1126
[19]Paszke W,Galkowski K,Rogers E.Repetitive process based iterative learning controldesign using frequency domain analysis.In:Proceedings of the 2012 IEEE International Conference on Control Applications.Dubrovnik,Croatia:IEEE,2012.1479−1484
[20]Kurek J E,Zaremba M B.Iterative learning control synthesis based on 2-D system theory.IEEE Transactions on Automatic Control,1993,38(1):121−125
[21]Li X D,Chow T W S,Ho JK L.2-D system theory based iterative learning control for linear continuous systems w ith time delays.IEEE Transactionson Circuitsand Systems,2005,52(7):1421−1430
[22]Xu JX.A survey on iterative learning control for nonlinear systems.International JournalofControl,2011,84(7):1275−1294
[23]Bristow D A,Tharayil M,A lleyne A G.A survey of iterative learning control.IEEEControlSystemsMagazine,2006,26(3):96−114 6
[24]Ahn H S,Chen Y Q,Moore K L.Iterative learning control:brief survey and categorization.IEEE Transactions on Systems,Man,and Cybernetics,2007,37(6):1099−1121
[25]Hwang D H,Bien Z,Oh S R.Iterative learning control method for discrete-time dynam ic systems.IEE Proceedings D:Control Theory&Applications,1991,138(2):139−144
[26]Sun M ing-Xuan,Huang Bao-Jian.Iterative Learning Control.Beijing:National Defence Industry Press,1999.20−105(in Chinese)
[27]Sun M ing-Xuan,Bi Hong-Bo,Chen Bai-Xia,He Hai-Gang.Learning identification of a class of stochastic time-varying systems w ith colored noise.Control Theory&Applications,2012,29(8):974−984(in Chinese)
[28]Chi R H,Hou Z S,Xu JX.Adaptive ILC for a class of discrete-time systems w ith iteration-varying trajectory and random initial condition.Automatica,2008,44(8):2207−2213
[29]Yu M,Wang JS,Qi D L.Discrete-time adaptive iterative learning control for high-order nonlinear systems w ith unknown control directions.International JournalofControl,2012,10(6):1111−1118
[30]Li X D,Xiao T F,Zheng H X.Adaptive discrete-time iterative learning control for non-linear multiple inputmultiple output systems w ith iteration-varying initial error and reference trajectory.IETControl Theory&Applications,2011,5(9):1131−1139
[31]Narendra K S,Xiang C.Adaptive controlof discrete-time systemsusing multiplemodels.IEEETransactionson Automatic Control,2000,45(9):1669−1686
[32]Li X L,ZhangW.Multiplemodel iterative learning control.Neurocomputing,2010,73(13−15):2439−2445
[33]Huang Lin.Linear A lgebra in System and Control Theory.Beijing:Science Press,1984.250−251(in Chinese)
[34]LiXiao-Li,WangWei.Multiplemodel sw itching controller for discretetime system.JournalofNortheastern University(NaturalScience),1999,20(5):468−469(in Chinese)
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Off-Policy Reinforcement Learning with Gaussian Processes
- Concurrent Learning-based Approximate Feedback-Nash Equilibrium Solution of N-player Nonzero-sum Differential Games
- Clique-based Cooperative Multiagent Reinforcement Learning Using Factor Graphs
- Reinforcement Learning Transfer Based on Subgoal Discovery and Subtask Similarity
- Closed-loop P-type Iterative Learning Control of Uncertain Linear Distributed Parameter Systems
- Experience Replay for Least-Squares Policy Iteration