系泊状态下船舶基座水平度测量系统设计
2014-03-25葛亚明吕淑平
葛亚明,于 鑫,吕淑平
(哈尔滨工程大学 自动化学院,黑龙江 哈尔滨 150001)
船舶上有各种高精度的导航设备、电子设备以及武器设备等,这些设备的正常运行需要高精度的安装平台,这些安装平台就是基座。为了保证设备的测量精度,必须使基座的水平度在允许的范围之内,甚至要求与基准平台相平行。水平度被定义为被测平台和基准平台之间的夹角。国内外船舶水平度测量方法主要有水平仪和象限仪,这两种测量方法大多还是人工操作,会因为人、时间、地点等的不同具有很大的误差[1]。
本文针对系泊状态下传统基座水平度测量方法的缺点,结合大型船舶自身特性,提出一种新的检测方法,并设计相应的数据传输通信系统。
1 水平度测量数学模型
假设被测平台(基座)和基准平台的中心重合。将被测平台平移到基准平台处,如图1所示,在基准平台上建立坐标系,原点放在基准平台正中心处,基准平台上船舶右舷正横方向定位x轴,y轴在基准平台上指向船舰首尾方向,z轴为垂直基准平台。在任意舷角qw方向上分别用倾角传感器测量被测平台和基准平台相对水平面的倾角θC和θJ,那么被测平台相对于基准平台的倾角θ=θC-θJ。
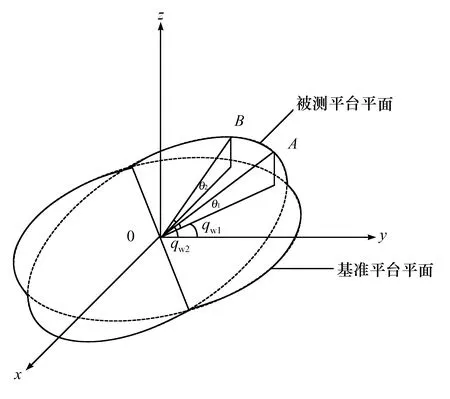
图1 被测平台与基准平台
设基准平台平面方程为
z=0
(1)
被测平台的平面方程为
x+ay+bz=0
(2)
测量时通常测量正交舷角方向的2个角度值,所以在本系统测量时,我们选取在qw1=0和qw2=90°方向测量,通过求取被测平台上距离所建立坐标系原点为R的A、B两点的坐标,可以获得平面方程中的各参数值如下:
(3)
式中φ为基准平台与被测平台之间的夹角。因此只要用传感器分别测量出基准平台和被测平台两个不同舷角方向上的倾角(θ1和θ2)[2-3],就可以利用此模型求出基座和基准平台之间的夹角φ,即基座水平度。
2 水平度测量系统硬件设计
系统由数字式倾角传感器、通信模块和显示模块组成,系统原理框图见图2。由于基准平台安装精度在20′以内,为了使测量更加精确,传感器的精度必须在6′以内[4]。由于船在系统状态下的摆动周期大约是10~15 s,因此传感器的响应速度应在1 s以下,故选择了一种基于RS232接口的数字式倾角传感器,即CXTILT系列双轴数字式倾角传感器。
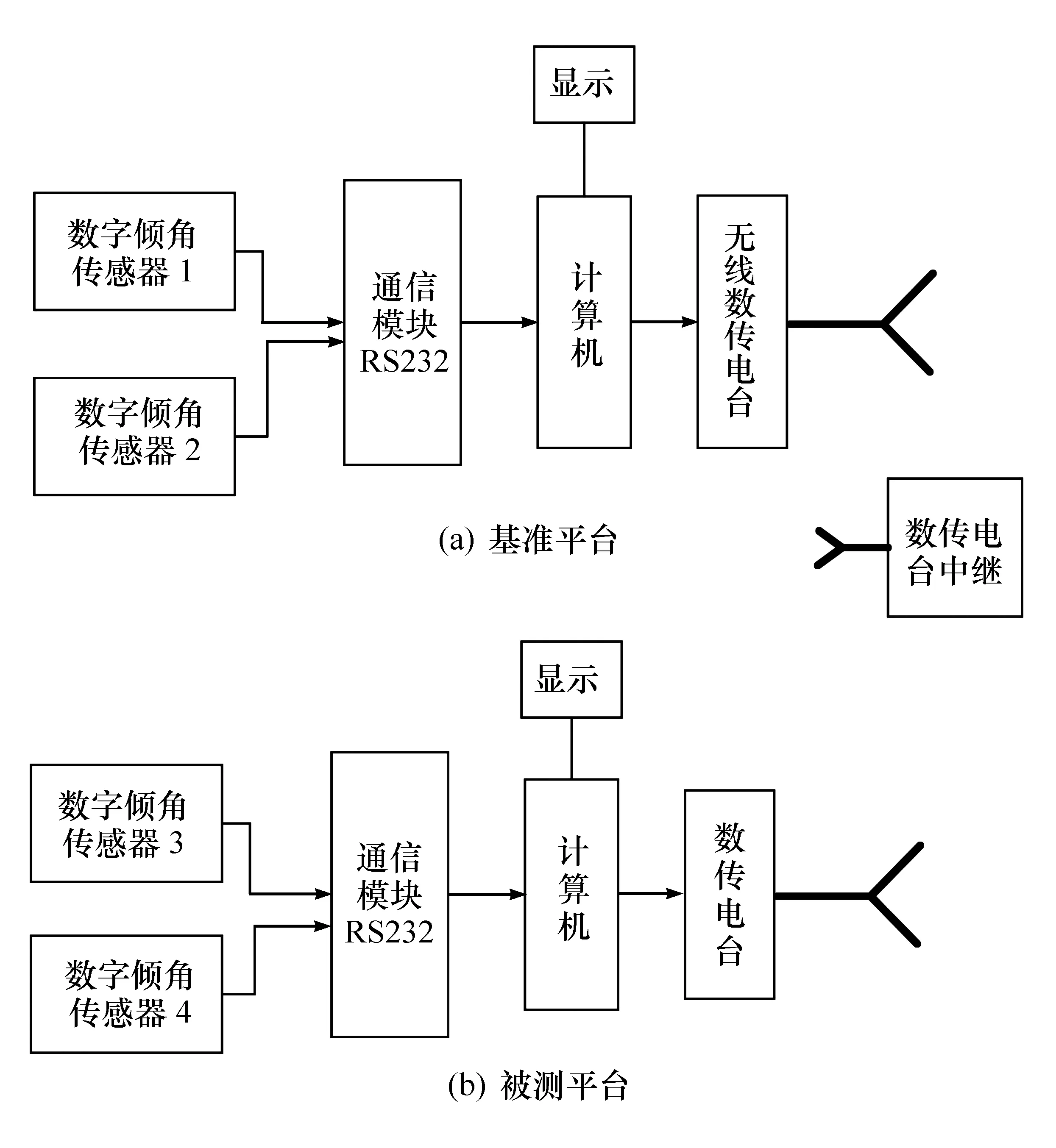
图2 水平度测量系统原理框图
系统数据采集的硬件设计结构如图3所示。采集过程如下:
(1) 被测平台和基准平台上的4个倾角传感器对倾角数据进行采集[5-6],把测量得到的数据通过RS232有线通信传输到计算机。
(2) 传感器软件把采集到的倾角数据通过建立的虚拟RS232串口即COM3和COM4传送到数据处理软件中进行数据处理[7]。
(3) 经过程序处理后的数据经过RS232和数传电台进行连接,通过数传电台进行船舱之间的传输[8]。数传电台首先要选择合适的传输频率,减少传输过程中的失真。
(4) 当船舶层数过高时会存在无线传播大幅度衰减,为了保证各个测量点能够正确地连接,增强无线通道的可靠性,需要架设无线电台中继[9]。
3 无线数据通信频率的选择
数据通信系统主要用于传输倾角的测量值,由于被测平台和基准平台大多不在同一个船舱内,为了保证船舱之间的封闭性,考虑用无线传输进行船舱之间倾角数据的传输[10-11]。
船舱通道空间比较窄,通道有拐弯,拐弯使电磁波损耗增加。通过对矩形通道和弯曲通道电磁波传播特性的分析[12],得到矩形通道和弯曲通道总的衰减系数L为
L=LEh+LEv+Lq
(4)
式中,LEv为垂直极化波衰减系数,LEh水平极化波衰减系数,Lq为弯曲通道的衰减系数。
对船舱通道空间内电磁波的传播总的衰减系数进行仿真,结果如图4示。表1给出了不同传输频率下总的衰减系数测量数据(弯道半径为50 m)。
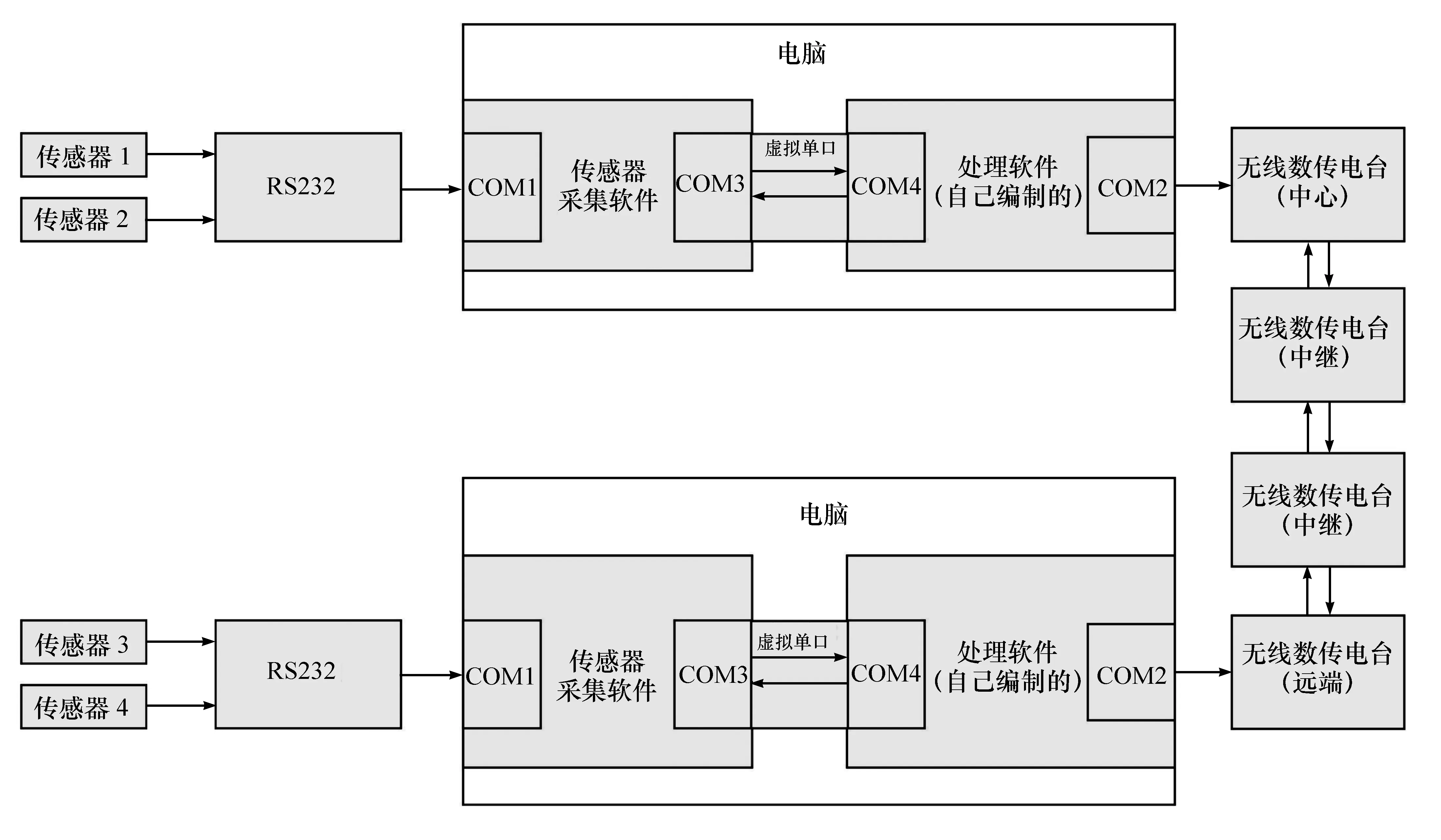
图3 数据采集硬件结构
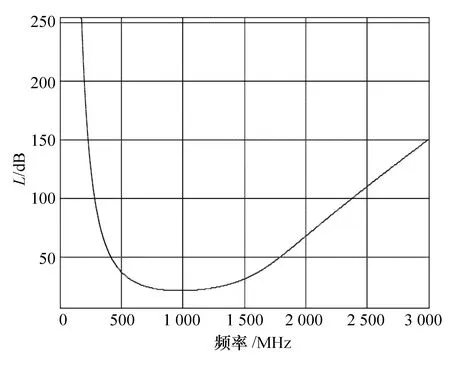
图4 总衰减系数与频率关系
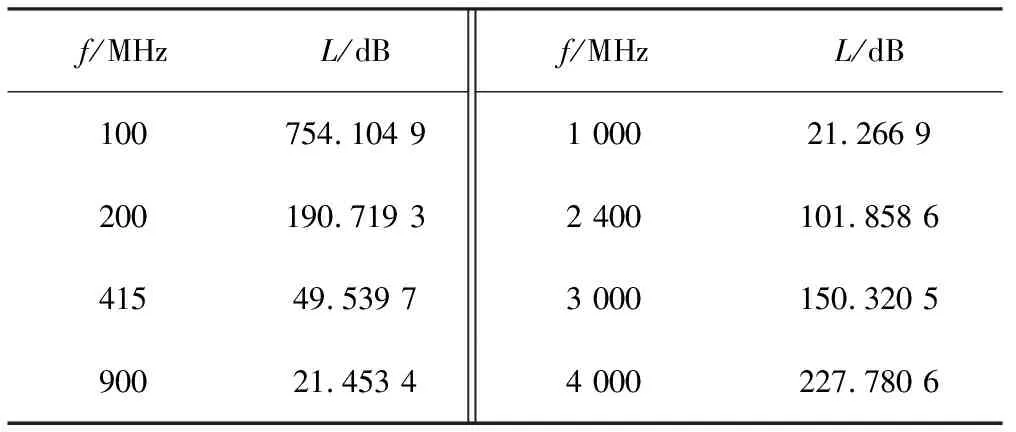
表1 不同频率总衰减系数
从图4和表1可以看出:在频率1 000 MHz附近的衰减率最小,但综合考虑传输衰减、多径效应、元器件的来源和器件的价格等多种因素,我们选用了910 MHz的数传电台。为了减少传输的数据量,降低信号的传输频率,提高数据传输的可靠性,降低误码率,数据流码率应该小于等于128 Kbit/s。
4 实验验证与分析
在某舰船上测量了横向和纵向两个方向的水平度,分别放置4个传感器,传感器1和传感器2在基准平台上,分别对应基准平台横向和纵向;传感器3和传感器4在被测平台上,分别对应被测平台横向和纵向。首先分别测得被测平台和基准平台相对于水平面的倾角值θ。30 min内测量了4组数据,每组16 456个数据。图5和图6分别为传感器1和传感器2测得的基准平台相对水平面的横向倾角值和纵向倾角值(为节省篇幅,传感器3和传感4测得的被测平台的倾角变化曲线略去)。
所测得的横向水平度值和纵向水平度值如图7和8所示。由图可得到,在这30 min内横向水平度的平均值为31.953 1″,纵向水平度的平均值为32.134 6″,横向和纵向水平值都存在大的误差和周期性系统误差,但是在30 min之内不存在线性系统误差,其中周期系统误差是由于海浪的波动导致船舶摇摆造成的。
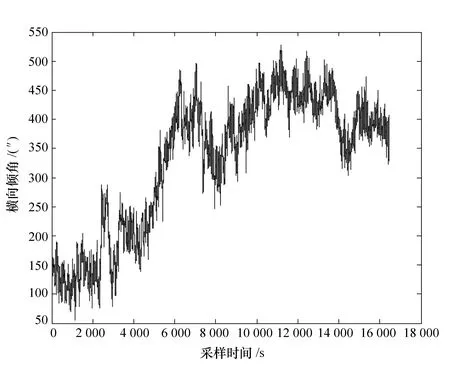
图5 传感器1测得的横向倾角值变化曲线
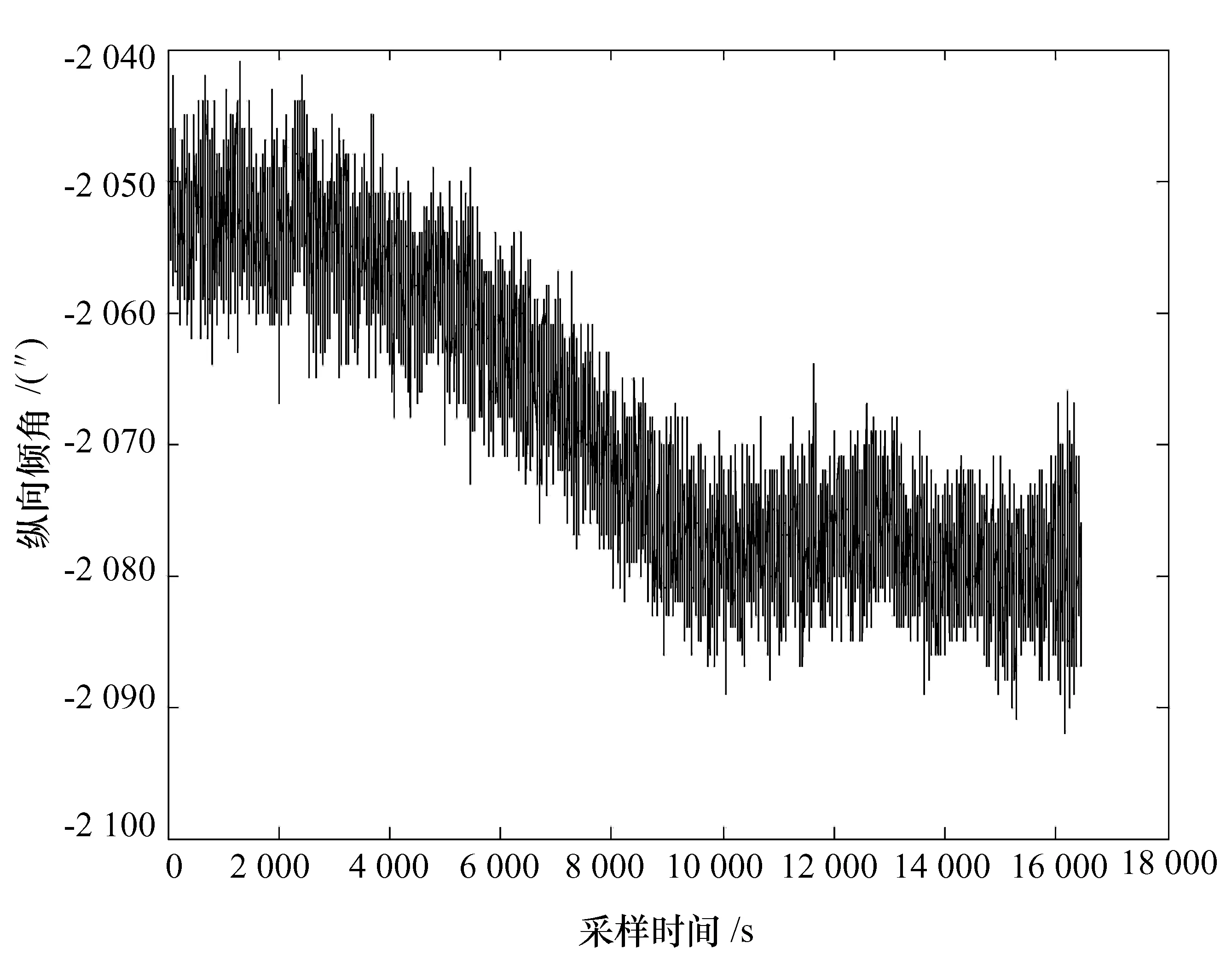
图6 传感器2测得的纵向倾角值变化曲线
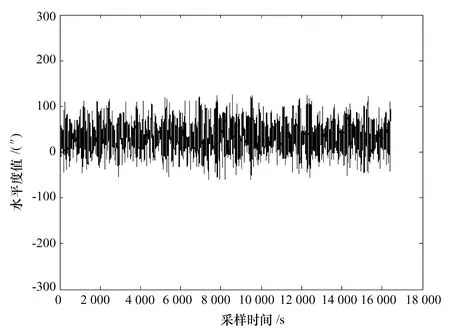
图7 横向水平度值变化曲线
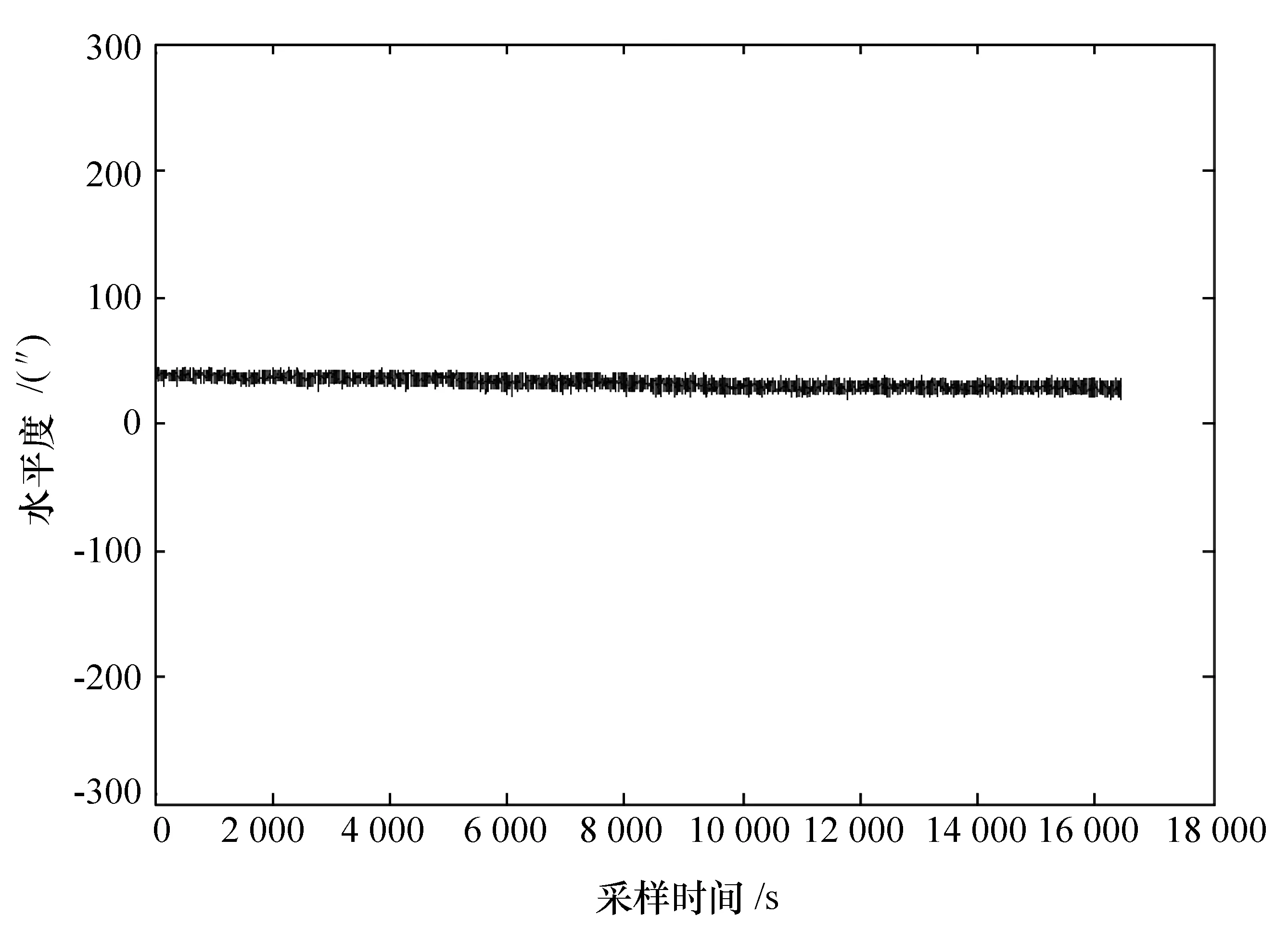
图8 纵向水平度变化曲线
根据以上各图形的仿真结果可以得到结论:无论是纵向还是横向传感器的差分值都不是一个恒定值;纵向的差分值相对稳定,变化范围较小;横向差分值变化很大,说明船体结构的横向变形对测量有很大的影响。设计的系统具有可行性,能够实现船舶系统倾角的测量及数据传输。
5 结束语
本文设计的船舶基座水平度自动测量系统,为现今船舶系统的测量提供了一种新的方法和途径。通过在实际舰船系统上进行实验,结果表明该系统的实施具有一定的可行性,当然,今后还需进行大量的实验验证,不断对系统的设计进行改进和完善。测量数据传输选择了无线通信方式,并对通信频率的选择做了详细的实验验证和分析,解决了封闭的船舱内对讲机通信噪声大或收不到信号的问题。
[1] 任顺清,王俊柱.用水平仪测试倾角回转误差的数据处理[J].哈尔滨工业大学学报,2006,38(6):837-839,847.
[2] 徐海兵,韩慧卿.一种新型倾角传感器在船舶模型实验中的应用[J].实验技术与管理,2003,20(6):28-30.
[3] 王志辉,康绍峥.无线数字式倾角测量系统设计[C]//中国电子学会电子机械工程分会2009年机械电子学学术会议论文集.2009.
[4] 刘吉富,王国根.舰艇武器系统平台水平度测量误差分析[J].船舶电子工程,2008,28(2):37-39.
[5] 程树昌,杨绍清.舰载武器系统水平度检测与校正新方法模型[J].火力与指挥控,2004,21(3):73-75.
[6] 丁德勇,康郦.王五成.水面舰艇电子武备基座水平度的检验与修正[J].情报指挥控制系统与仿真技术,2004,26(6):70-73.
[7] 程树昌,杨绍清.舰载武器系统水平度检测与校正新方法模型[J].火力与指挥控,1996,21(3):73-75.
[8] 刘华.无线通信技术在造船厂的应用[J].船海工程,2012(3):50-54.
[9] 李敏,张莉,何光伟.有线通信与无线通信的优劣对比分析[J].计算机光盘软件与应用,2012(5):25-26.
[10] 郭琼,马璟.基于无线通信网络的过程控制实验平台开发[J].实验技术与管理,2011,28(10):78-81.
[11] 何志敏,梅大成,谭文学.一种基于无线传输的分布式数据采集和控制系统[J].现代电子技术,2004(19):27-28,31.
[12] 孙继平,成凌飞,张长森.截面尺寸对矩形巷道中电磁波传播的影响[J].中国矿业大学学报,2005,34(5):596-598.